联合收割机及作业机的制作方法
1.本发明涉及联合收割机及作业机。
背景技术:
2.〔1〕以往,在联合收割机中,公开了脱谷装置的后部的构造。
3.在联合收割机中,如在专利文献1中公开那样,在将收割后的作物脱谷处理的脱谷装置中,在脱谷装置的后部设置有将脱粒滚筒的后部能够旋转地支承的后壁部,相对于后壁部在下侧形成有将来自脱谷装置的碎屑排出的排尘口,设置有将排尘口覆盖的排尘罩。
4.由此,来自脱谷装置的碎屑被从排尘口排出,被排尘罩向下方的地面引导而落下到地面。
5.〔2〕以往,在具备贮存谷粒的谷粒箱的联合收割机中,公开了谷粒箱的谷粒的排出的结构。
6.在具备谷粒箱的联合收割机中,如在专利文献2中公开那样,具备能够将谷粒箱的谷粒排出的谷粒输送装置。
7.在谷粒输送装置中,设置有:纵输送部,与谷粒箱的下部连接,沿着上下方向配置;中继输送部,以沿着水平方向的状态与纵输送部的上部连结;横输送部,能够绕中继输送部的中心轴上下摆动地与中继输送部连结;以及横输送部的末端部的谷粒排出口。
8.在谷粒输送装置中,通过由升降缸将横输送部相对于中继输送部上下摆动操作,将横输送部升降操作。
9.〔3〕以往,作为作业机,例如已知有专利文献3中记载的作业机。在专利文献3中记载的作业机中,具备:作业装置(在文献中为“脱谷装置〔5〕”),以及侧部罩,能够拆装地设置在作业装置的侧部,被分割为多个罩部件(在文献中为“第1侧罩〔21〕、第2侧罩〔22〕等”)而构成。
10.现有技术文献专利文献专利文献1:日本特开2015-42188号公报专利文献2:日本特开2016-106602号公报专利文献3:日本特开2019-126279号公报。
技术实现要素:
11.发明要解决的课题〔1〕与背景技术〔1〕对应的课题是以下这样的。
12.与专利文献1中公开的装备有排尘罩的型式的联合收割机另外地,有在脱谷装置的排尘口安装切碎装置、借助切碎装置将从排尘口出来的碎屑切碎处理的型式的联合收割机。
13.本发明以构成为能够没有勉强地得到装备有排尘罩的型式的联合收割机和装备
有切碎装置的型式的联合收割机为目的。
14.〔2〕与背景技术〔2〕对应的课题是以下这样的。
15.在谷粒输送装置中,在构成为借助升降缸将横输送部升降操作的情况下,为了避免横输送部与联合收割机的其他部分的接触,需要设置检测横输送部的上下摆动位置(上下角度)的高度传感器。
16.本发明以在联合收割机的谷粒输送装置中使由高度传感器对于横输送部的上下摆动位置(上下角度)的检测精度提高为目的。
17.〔3〕与背景技术〔3〕对应的课题是以下这样的。
18.在专利文献3所记载的作业机中,有相互相邻的两个罩部件彼此相对地位置偏移这一情况。
19.鉴于上述状况,希望有能够防止相互相邻的两个罩部件彼此的相对的位置偏移的作业机。
20.用来解决课题的手段〔1〕与课题〔1〕对应的解决手段是以下这样的。
21.本发明是一种具备将被收割的作物脱谷处理的脱谷装置的联合收割机,在前述脱谷装置,具备:后壁部,设置在前述脱谷装置的后部,将脱粒滚筒的后部能够旋转地支承;排尘口,相对于前述后壁部形成在下侧,将来自前述脱谷装置的碎屑排出;以及安装部件,设置在前述后壁部,能够将排尘罩和切碎装置换装,所述排尘罩将前述排尘口覆盖以将从前述排尘口出来的碎屑向下方的地面引导,所述切碎装置将从前述排尘口出来的碎屑切碎处理;构成为,能够选择为将用来支承前述排尘罩的撑条安装于前述安装部件而将前述排尘罩与前述后壁部连结的第1状态、以及将前述切碎装置安装于前述安装部件而将前述切碎装置与前述后壁部连结的第2状态。
22.根据本发明,在脱谷装置中,具备后壁部、排尘口和安装部件。
23.后壁部设置在脱谷装置的后部,将脱粒滚筒的后部能够旋转地支承。排尘口相对于后壁部形成在下侧,将来自脱谷装置的碎屑排出。
24.安装部件设置在后壁部,能够换装排尘罩和切碎装置,所述排尘罩将排尘口覆盖以将从排尘口出来的碎屑向下方的地面引导,所述切碎装置将从排尘口出来的碎屑切碎处理。
25.在得到装备有排尘罩的型式的联合收割机的情况下,只要设定将用来支承排尘罩的撑条安装于安装部件而将排尘罩与后壁部连结的第1状态即可。
26.排尘罩通过被要求外观良好的设计以及使用合成树脂等轻量的原材料,有构成为箱状的比较大的排尘罩的情况。由此,即使是比较大的排尘罩,排尘罩也被撑条稳定地支承。
27.在得到装备有切碎装置的型式的联合收割机的情况下,只要设定将切碎装置安装于安装部件而将切碎装置与后壁部连结的第2状态即可。
28.通过将与排尘罩形状不同的切碎装置直接与后壁部连结,将切碎装置稳定地支承。
29.如以上这样,能没有勉强地得到装备有排尘罩的型式的联合收割机和装备有切碎装置的型式的联合收割机,在生产率的方面是有利的。
30.在本发明中,优选的是,前述安装部件是从前述后壁部向后侧突出的螺栓;在前述第1状态下,连结着前述撑条的撑条基部借助前述安装部件而与前述后壁部连结;在前述第2状态下,前述切碎装置的安装部借助前述安装部件而与前述后壁部连结。
31.根据本发明,由于将设置在后壁部的安装部件用螺栓简洁地构成,所以在构造的简洁化的方面是有利的。
32.根据本发明,通过在第1状态下将连结着撑条的撑条基部用作为螺栓的安装部件容易地与后壁部连结、以及在第2状态下将切碎装置的安装部用作为螺栓的安装部件容易地与后壁部连结,第1状态及第2状态的设定的作业性提高。
33.在本发明中,优选的是,在前述后壁部设置有沿着左右方向延伸出的基板部;多个前述安装部件沿着左右方向隔开间隔配置在前述基板部,以从前述基板部向后侧突出的方式设置;在前述第1状态下,沿着前述基板部在左右方向上延伸出的前述撑条基部与前述基板部连结;在前述第2状态下,沿着前述基板部在左右方向上延伸出的前述安装部与前述基板部连结。
34.根据本发明,将多个安装部件沿着左右方向隔开间隔配置在后壁部的基板部。
35.由此,在第1状态下,将在左右方向上较长的撑条基部借助多个安装部件而与后壁部的基板部连结,即使排尘罩拥有较大的横宽,也由撑条及撑条基部将排尘罩稳定地支承。
36.在第2状态下,即使切碎装置拥有较大的横宽,也由多个安装部件将切碎装置稳定地支承。
37.在本发明中,优选的是,前述基板部被弯折为截面l字状而构成。
38.根据本发明,由于在左右方向上较长的基板部被弯折为截面l字状而构成,所以能够实现基板部的强度的提高。
39.在本发明中,优选的是,在前述第1状态下相对于前述排尘罩配置在上侧而将前述脱谷装置的后部覆盖的第1罩、以及在前述第2状态下相对于前述切碎装置配置在上侧而将前述脱谷装置的后部覆盖的第2罩中,能够支承前述第1罩且能够支承前述第2罩的罩撑条以相对于前述安装部件位于上侧的方式设置在前述后壁部。
40.在联合收割机中,在第1状态下,有相对于排尘罩在上侧安装第1罩、由第1罩将脱谷装置的后部覆盖的情况。在第2状态下,有相对于切碎装置在上侧安装第2罩、由第2罩将脱谷装置的后部覆盖的情况。
41.根据本发明,罩撑条以相对于安装部件位于上侧的方式设置在后壁部,在第1状态下,第1罩被罩撑条支承,在第2状态下,第2罩被罩撑条支承。
42.由此,将罩撑条共用于第1罩的支承用及第2罩的支承用,所以在构造的简洁化的方面是有利的。
43.在本发明中,优选的是,在前述排尘罩,具备:后表面部,从前述排尘口向后侧隔开间隔配置,以沿着上下方向及左右方向的方式形成;右方及左方的横表面部,从前述后表面部的右部及左部朝向前述排尘口延伸出,沿着上下方向及前后方向形成;排出部,被前述后表面部的下部和前述右方及左方的横表面部的下部包围而朝下形成,将碎屑向下方排出;以及右方及左方的延伸出部,从前述右方及左方的横表面部的下部延伸出到比前述后表面部的下部靠下侧,沿着上下方向及前后方向形成。
44.根据本发明,排尘罩被构成为具备后表面部、右方及左方的横表面部的箱状,从被
后表面部的下部和右方及左方的横表面部的下部包围而朝下形成的排出部将碎屑向下方排出。
45.根据本发明,在排尘罩中,右方的延伸出部从右方的横表面部的下部延伸出到比后表面部的下部靠下侧,沿着上下方向及前后方向形成。左方的延伸出部从左方的横表面部的下部延伸出到比后表面部的下部靠下侧,沿着上下方向及前后方向形成。
46.由此,即使被从排尘罩的排出部向下方排出的碎屑要向右方或左方流动,也容易由排尘罩的右方及左方的延伸出部将碎屑的流动阻止,所以能抑制碎屑的飞散。
47.〔2〕与课题〔2〕对应的解决手段是以下这样的。
48.本发明的联合收割机具备:谷粒箱,贮存谷粒;以及谷粒输送装置,能够将前述谷粒箱的谷粒排出;在前述谷粒输送装置,设置有与前述谷粒箱的下部连接并沿着上下方向配置的纵输送部、以沿着水平方向的状态与前述纵输送部的上部连结的中继输送部、能够绕前述中继输送部的中心轴上下摆动地与前述中继输送部连结的横输送部、以及设置在前述横输送部的末端部的谷粒排出口;具备:第1升降部件,能够绕前述中心轴上下摆动地被前述中继输送部支承;第2升降部件,跨前述第1升降部件和前述横输送部而安装;升降缸,与前述第2升降部件连接,通过伸缩动作而将前述横输送部绕前述中心轴升降操作;以及高度传感器,通过检测前述第1升降部件或前述第2升降部件的位置,来检测前述横输送部的上下摆动位置。
49.根据本发明,在设置有纵输送部、中继输送部及横输送部的谷粒输送装置中,设置有能够绕中继输送部的中心轴摆动地被中继输送部支承的第1升降部件以及跨第1升降部件和横输送部而安装的第2升降部件。
50.升降缸与第2升降部件连接,通过升降缸伸缩动作,经由第2升降部件将横输送部升降操作。
51.由于第1升降部件及第2升降部件与横输送部一体地上下摆动,所以通过如本发明那样,设置通过检测第1升降部件或第2升降部件的位置来检测横输送部的上下摆动位置的高度传感器,能够在避免零件件数的增加的同时,用高度传感器直接检测横输送部的上下摆动位置(上下角度),能够使由高度传感器对于横输送部的上下摆动位置(上下角度)的检测精度提高。
52.在本发明中,优选的是,前述高度传感器通过检测前述第1升降部件的位置,来检测前述横输送部的上下摆动位置。
53.根据本发明,由高度传感器检测第1升降部件的位置。由于第1升降部件能够绕中继输送部的中心轴上下摆动,所以通过由高度传感器检测第1升降部件的位置(上下角度),能够没有勉强地检测横输送部的上下摆动位置。
54.在本发明中,优选的是,在前述高度传感器设置有能够沿着上下方向摆动的臂部;前述臂部与前述第1升降部件连接;通过随着前述第1升降部件的摆动而前述臂部摆动,由前述高度传感器检测前述第1升降部件的位置。
55.根据本发明,第1升降部件的摆动经由臂部被传递给高度传感器,由高度传感器检测第1升降部件的位置(上下角度),基于第1升降部件的长度与臂部的长度的比,第1升降部件的摆动被放大或压缩并被传递给高度传感器。
56.根据本发明,不是将第1升降部件的摆动原样传递给高度传感器,而是通过将第1
升降部件的长度与臂部的长度的比设定为适当的值,能够将第1升降部件的摆动变换为对于高度传感器而言能够没有勉强地进行检测的适当的范围并传递给高度传感器,由此能够使高度传感器的检测精度提高。
57.在本发明中,优选的是,前述第1升降部件被前述中继输送部的前述横输送部的相反侧的部分支承;前述高度传感器在俯视中相对于前述第1升降部件配置在前述横输送部侧的位置。
58.根据本发明,在俯视中,在中继输送部的一方的部分配置横输送部,在中继输送部的另一方的部分配置第1升降部件,高度传感器在俯视中相对于第1升降部件配置在横输送部侧的位置,成为配置在第1升降部件与横输送部之间的状态。
59.由此,将高度传感器紧凑地配置,抑制了高度传感器与联合收割机的其他部分接触的可能性,在避免高度传感器的损坏这一方面是有利的。
60.在本发明中,优选的是,前述第1升降部件被形成为具有沿着上下方向的纵表面部、从前述纵表面部的上部在朝向前述横输送部的横向上延伸的上表面部、以及从前述纵表面部的下部在朝向前述横输送部的横向上延伸的下表面部的截面槽型形状;前述臂部的端部的与前述第1升降部件连接的连接部分从前述第1升降部件的延伸方向观察配置在前述上表面部与前述下表面部之间。
61.根据本发明,由于第1升降部件被形成为具有纵表面部、上表面部及下表面部的截面槽型形状,所以能够使第1升降部件的强度提高。
62.根据本发明,由于在高度传感器的臂部的端部处与第1升降部件连接的连接部分从第1升降部件的延伸方向观察配置在第1升降部件的上表面部与下表面部之间,成为高度传感器的臂部的连接部分被第1升降部件包围的状态,所以在避免臂部的损坏这一方面是有利的。
63.在本发明中,优选的是,前述臂部被朝向前述上表面部或前述下表面部施力,以使前述臂部的连接部分与前述上表面部或前述下表面部接触;随着前述第1升降部件的摆动,在前述臂部的连接部分在前述上表面部或前述下表面部滑动的同时,前述臂部摆动。
64.在高度传感器的臂部的连接部分与第1升降部件连接的情况下,因为高度传感器的位置与第1升降部件的位置的差异、第1升降部件的长度与高度传感器的臂部的长度的差异等,有高度传感器的臂部的连接部分的轨迹与第1升降部件的轨迹不同的情况。
65.根据本发明,高度传感器的臂部被朝向第1升降部件的上表面部(下表面部)施力,高度传感器的臂部的连接部分与第1升降部件的上表面部(下表面部)接触。
66.如果在该状态下第1升降部件摆动,则高度传感器的臂部以追随于第1升降部件的方式摆动,通过高度传感器的臂部的连接部分沿着第1升降部件的上表面部(下表面部)滑动,将高度传感器的臂部的连接部分的轨迹与第1升降部件的轨迹的差吸收。
67.根据本发明,在将高度传感器的臂部的连接部分的轨迹与第1升降部件的轨迹的差没有勉强地吸收的同时,将第1升降部件的摆动经由高度传感器的臂部传递给高度传感器,能够使高度传感器的检测精度提高。
68.在本发明中,优选的是,前述高度传感器从沿着水平方向的方向观察配置在前述中继输送部的上部与前述中心轴之间。
69.根据本发明,在谷粒输送装置中,高度传感器被配置在比较高的位置,成为不出去
到比中继输送部靠上侧的状态,所以抑制了高度传感器与联合收割机的其他部分接触的可能性,在避免高度传感器的损坏这一方面是有利的。
70.在本发明中,优选的是,前述高度传感器经由撑条被前述中继输送部支承。
71.根据本发明,通过高度传感器经由撑条被中继输送部稳定地支承,高度传感器的位置稳定,所以能够使高度传感器的检测精度提高。
72.〔3〕与课题〔3〕对应的解决手段是以下这样的。
73.本发明的特征在于,具备:作业装置;侧部罩,能够拆装地设置在前述作业装置的侧部,被分割为多个罩部件而构成;以及定位部,跨前述多个罩部件中的相互相邻的两个罩部件而设置,将前述两个罩部件中的一方的罩部件和前述两个罩部件中的另一方的罩部件定位;前述定位部具有设置在前述一方的罩部件并且朝向前述另一方的罩部件突出的突起部、以及设置在前述另一方的罩部件并且前述突起部进入的进入部。
74.根据本特征结构,通过将一方的罩部件和另一方的罩部件用定位部定位,能够防止相互相邻的两个罩部件彼此的相对的位置偏移。此外,通过使突起部进入到进入部的简单的操作,能够将一方的罩部件和另一方的罩部件容易地定位。
75.进而,在本发明中,优选的是,在前述一方的罩部件中的前述另一方的罩部件侧的缘部,设置有第一面部;在前述另一方的罩部件中的前述一方的罩部件侧的缘部,设置有第二面部;前述一方的罩部件及前述另一方的罩部件以前述第一面部与前述第二面部对置的状态配置;前述突起部设置在前述第一面部;前述进入部设置在前述第二面部。
76.根据本特征结构,在将一方的罩部件及另一方的罩部件以第一面部与第二面部对置的状态安装时,能够容易地使突起部进入到进入部。
77.进而,在本发明中,优选的是,前述突起部由板状的部分构成;前述进入部由切缺部或开口部构成。
78.根据本特征结构,能够将突起部及进入部简洁地构成。
79.进而,在本发明中,优选的是,前述一方的罩部件及前述另一方的罩部件以在前述第一面部与前述第二面部之间存在间隙的状态配置;在前述第一面部及前述第二面部的至少一方,设置有将前述间隙遮盖的间隙遮盖部。
80.根据本特征结构,间隙被间隙遮盖部遮盖。由此,侧部罩的内部不从间隙向侧部罩的外部露出,并且尘埃等难以从间隙侵入到侧部罩的内部。
81.进而,在本发明中,优选的是,前述间隙遮盖部由从前述第一面部或前述第二面部延伸出的部分构成。
82.根据本特征结构,能够将间隙遮盖部简洁地构成。
83.进而,在本发明中,优选的是,前述间隙遮盖部设置在与前述进入部相同的前述第二面部。
84.这里,假如在间隙遮盖部设置在与突起部相同的第一面部的情况下,在安装有另一方的罩部件的状态下,当使突起部进入到进入部时,由于间隙遮盖部的位置与突起部一起变化,所以间隙遮盖部容易与另一方的罩部件干涉。
85.根据本特征结构,在安装有另一方的罩部件的状态下,当使突起部进入到进入部时,由于间隙遮盖部的位置不变化,所以间隙遮盖部不易与一方的罩部件干涉。
86.进而,在本发明中,优选的是,在前述第一面部的端部,设置有前述突起部;在前述
第二面部的端部,设置有前述进入部。
87.根据本特征结构,通过将第一面部的端部和第二面部的端部对位,突起部进入到进入部。由此,能够容易地使突起部进入到进入部。
88.进而,在本发明中,优选的是,前述进入部由切缺部构成;前述突起部相对于前述进入部能够沿着切缺方向插拔地构成。
89.根据本特征结构,通过将突起部相对于进入部沿着切缺方向插拔,突起部进入到进入部或突起部从进入部脱出。由此,能够容易地进行借助定位部的定位及其解除。
90.进而,在本发明中,优选的是,作为前述作业装置而具备脱谷装置;前述侧部罩能够拆装地设置在前述脱谷装置的横侧部,并且能够上下分割为前述多个罩部件而构成;前述定位部跨前述多个罩部件中的相互上下相邻的两个罩部件而设置,并且将前述两个罩部件中的位于上侧的罩部件和前述两个罩部件中的位于下侧的罩部件定位;前述突起部设置在前述位于上侧的罩部件;前述进入部设置在前述位于下侧的罩部件。
91.根据本特征结构,通过将位于上侧的罩部件和位于下侧的罩部件用定位部定位,能够防止相互上下相邻的两个罩部件彼此的相对的位置偏移。此外,通过使突起部从上方进入到进入部的简单的操作,能够容易地将位于上侧的罩部件和位于下侧的罩部件定位。
92.进而,在本发明中,优选的是,前述位于上侧的罩部件及前述位于下侧的罩部件以在前述位于上侧的罩部件的下缘部与前述位于下侧的罩部件的上缘部之间存在间隙的状态配置;在前述位于下侧的罩部件的上缘部,设置有将前述间隙遮盖的间隙遮盖部;前述间隙遮盖部从前述位于下侧的罩部件的上缘部延伸出到比前述位于上侧的罩部件的下缘部靠前述脱谷装置的横内侧的位置。
93.根据本特征结构,间隙被间隙遮盖部遮盖。由此,侧部罩的内部不从间隙向侧部罩的外部露出,并且尘埃等难以从间隙侵入到侧部罩的内部。此外,间隙遮盖部的端缘位于比位于上侧的罩部件的下缘部的端缘靠脱谷装置的横内侧。由此,能够有效地防止侧部罩的内部从间隙向侧部罩的外部露出。
附图说明
94.图1是表示第1实施方式的图(以下,到图11为止相同),是第1状态的联合收割机的左侧视图。
95.图2是第1状态的联合收割机的俯视图。
96.图3是脱谷装置的后部的立体图。
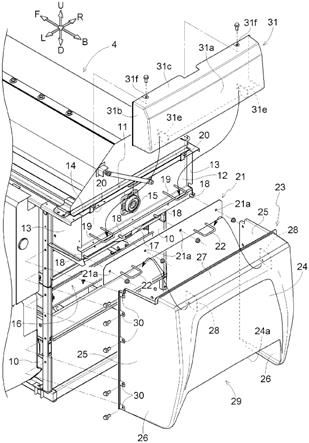
97.图4是第1状态的脱谷装置的后部的立体图。
98.图5是第1罩的立体图。
99.图6是排尘罩的立体图。
100.图7是第1状态的脱谷装置的后部的纵剖左侧视图。
101.图8是第2状态的联合收割机的左侧视图。
102.图9是第2状态的脱谷装置的后部的立体图。
103.图10是第2罩的立体图。
104.图11是第2状态的脱谷装置的后部的纵剖左侧视图。
105.图12是表示第2实施方式的图(以下,到图20为止相同),是联合收割机的右侧视
图。
106.图13是联合收割机的俯视图。
107.图14是谷粒输送装置的中继输送部的附近的右侧视图。
108.图15是谷粒输送装置的中继输送部的附近的俯视图。
109.图16是谷粒输送装置的高度传感器的附近的主视图。
110.图17是谷粒输送装置的高度传感器的附近的纵剖右侧视图。
111.图18是谷粒输送装置的灯的附近的纵剖右侧视图。
112.图19是谷粒输送装置的灯的附近的横断俯视图。
113.图20是表示谷粒输送装置的回转状态及升降状态的概略图。
114.图21是表示第3实施方式的图(以下,到图33为止相同),是表示联合收割机的左侧视图。
115.图22是表示联合收割机的俯视图。
116.图23是表示顶板的俯视图。
117.图24是表示顶板的正面剖视图。
118.图25是表示顶板的立体图。
119.图26是表示第四罩部件的正面剖视图。
120.图27是表示第一罩部件及第二罩部件的主视图。
121.图28是表示第一罩部件的立体图。
122.图29是表示第二罩部件的俯视图。
123.图30是表示第一罩部件及第二罩部件的左侧视图。
124.图31是表示间隙遮盖部的剖视图。
125.图32是表示向送料器的动力传递构造的左侧视图。
126.图33是表示向送料器的动力传递构造的俯视图。
具体实施方式
127.〔第1实施方式〕首先,一边参照图1~图11一边对第1实施方式进行说明。
128.在图1~图11中表示普通型的联合收割机,在图1~图11中,f表示前方,b表示后方,u表示上方,d表示下方,r表示右方,l表示左方。
129.(联合收割机的整体结构)如图1及图2所示,由右方及左方的履带型式的行驶装置2支承着机体1。作业者搭乘的驾驶部3设置在机体1的前部的右部。脱谷装置4设置在机体1的后部的左部,谷粒箱5设置在机体1的后部的右部。
130.送料器6与脱谷装置4的前部连结并向前侧延伸出,收割部7与送料器6的前部连结,将田地的作物收割的收割部7设置在机体1的前部。
131.通过以上的结构,随着机体1的行进,将田地的作物导入到收割部7而收割,将被收割的作物经过送料器6输送,向脱谷装置4供给。将被收割的作物用脱谷装置4脱谷处理,将由脱谷装置4脱谷处理并回收的谷粒贮存于谷粒箱5。
132.(脱谷装置的结构)
如图1、图2、图3所示,在脱谷装置4,设置有绕沿着前后方向的轴芯p1被旋转驱动的脱粒滚筒8以及相对于脱粒滚筒8使下侧沿着前后方向配置的分选部9;脱粒滚筒8和分选部9配置在右方及左方的侧板10之间,构成脱谷装置4。后壁部11与右方及左方的侧板10的后部连结并设置在脱谷装置4的后部,脱粒滚筒8的后部能够旋转地被后壁部11支承。
133.如图3所示,在后壁部11设置有:后表面部12,沿着上下方向及左右方向形成;右方及左方的横表面部13,与后表面部12的右部及左部连结,沿着上下方向及前后方向形成;以及上表面部14,与后表面部12及横表面部13的上部连结,沿着左右方向及前后方向形成。后壁部11的右方及左方的横表面部13与右方及左方的侧板10的后部连结,支承脱粒滚筒8的轴承部15与后壁部11的后表面部12连结。
134.由此,将脱粒滚筒8的后部能够旋转地支承的后壁部11被设置在脱谷装置4的后部。将来自脱谷装置4的碎屑排出的排尘口16相对于后壁部11及脱粒滚筒8的后部形成在下侧,相对于分选部9形成在后侧。
135.通过以上的结构,经过送料器6被输送并供给到脱谷装置4的作物被脱粒滚筒8脱谷处理,处理物向分选部9落下,在分选部9中从处理物分选谷粒,将谷粒向谷粒箱5输送并贮存。将从脱粒滚筒8及分选部9出来的排出稻草等的碎屑从排尘口16排出。
136.(用来将排尘罩及切碎装置与脱谷装置的后部连结的结构)如图3及图4所示,在后壁部11中,后表面部12的下边部作为沿着左右方向延伸出的基板部17设置在后壁部11,将基板部17弯折为截面l字状(角状)而构成。
137.4根螺栓18(相当于安装部件)沿着左右方向隔开间隔而配置于基板部17,以从基板部17向后侧突出的方式设置。如以上这样,4根螺栓18被设置在后壁部11。
138.如后述的(第1状态)(第2状态)的记载、图4及图9所示,螺栓18设置在后壁部11,能够将排尘罩23和切碎装置33换装,所述排尘罩23将排尘口16覆盖,以将从排尘口16出来的碎屑向下方的地面引导,所述切碎装置33将从排尘口16出来的碎屑切碎处理。
139.如图3及图4所示,与后表面部12连结并以从后表面部12向后侧突出的方式设置有将圆棒材在俯视中形成为沟槽(channel)状的两个罩撑条19。在上表面部14的后端部连结有将板材弯折而形成的两个罩撑条20。如以上这样,罩撑条19、20以相对于螺栓18位于上侧的方式设置在后壁部11。
140.如图4所示,设置有平板状的撑条基部21,在撑条基部21开设有4个连结孔21a。在撑条基部21连结有将圆棒材在俯视中形成为沟槽状的两个撑条(stay)22。
141.撑条22及撑条基部21如在后述的(第1状态)中记载那样,是在装备有排尘罩23的第1状态下使用的,如在后述的(第2状态)中记载那样,在装备有切碎装置33的第2状态下不被使用。
142.(排尘罩及第1罩的结构)如图4及图6所示,设置有排尘罩23。在排尘罩23,设置有后表面部24、右方及左方的横表面部25、右方及左方的延伸出部26、上表面部27、以及卡合部28,排尘罩23的整体由合成树脂一体地形成为箱状。
143.如在后述的(第1状态)中记载那样,在装备着排尘罩23的状态下,后表面部24从排尘口16向后侧隔开间隔而配置,沿着上下方向及左右方向形成。
144.上表面部27跨后表面部24的上部和右方及左方的横表面部25的上部沿着左右方
向及前后方向形成。在排尘罩23的内表面,跨后表面部24和上表面部27设置有两个卡合部28。
145.右方及左方的横表面部25从后表面部24的右部及左部朝向排尘口16延伸出,沿着上下方向及前后方向形成。
146.右方及左方的延伸出部26从右方及左方的横表面部25的下部延伸出到比后表面部24的下部24a靠下侧,沿着上下方向及前后方向形成。
147.在装备着排尘罩23的状态下,排出部29被后表面部24的下部和右方及左方的横表面部25的下部包围而朝下形成。在右方及左方的横表面部25的前端部开设有连结孔30,在右方及左方的延伸出部26的前端部开设有连结孔30。
148.如图4及图5所示,设置有第1罩31。在第1罩31,设置有后表面部31a、右方及左方的横表面部31b、上表面部31c、下表面部31d、两个卡合部31e、以及在上表面部31c开设的两个连结孔31f,第1罩31的整体由合成树脂一体地形成为箱状。
149.(第1状态)如图4及图7所示,在第1状态下,使用撑条22及撑条基部21。将螺栓18插入到撑条基部21的连结孔21a,将撑条基部21碰抵在基板部17。将螺母安装于螺栓18并拧紧,将撑条22及撑条基部21与基板部17连结。
150.将连结着撑条22的撑条基部21借助螺栓18与后壁部11连结,将沿着基板部17在左右方向上延伸出的撑条基部21与基板部17连结。
151.如图1、图2、图4、图7所示,通过将排尘罩23的卡合部28挂在撑条22,将排尘罩23用撑条22支承。
152.将排尘罩23的横表面部25及延伸出部26的前端部碰抵在右方及左方的侧板10的后部,将螺栓跨排尘罩23的连结孔30和侧板10的开口部安装,用螺栓将排尘罩23的横表面部25及延伸出部26的前端部与右方及左方的侧板10的后部连结。
153.将第1罩31的卡合部31e挂在罩撑条19,将第1罩31的上表面部31c载于罩撑条20。将螺栓跨第1罩31的连结孔31f和罩撑条20的开口部安装,用螺栓将第1罩31的上表面部31c与罩撑条20连结。
154.以上的状态是将用来支承排尘罩23的撑条22安装于螺栓18(安装部件)而将排尘罩23与后壁部11连结的第1状态。
155.在第1状态下,将排尘口16覆盖以将从排尘口16出来的碎屑向下方的地面引导的排尘罩23被撑条22支承,与脱谷装置4的后部连结。第1罩31相对于排尘罩23被配置在上侧,成为将脱谷装置4的后部覆盖的状态。
156.(切碎装置及第2罩的结构)如图9所示,设置有切碎装置33。在切碎装置33中,设置有金属制的后表面部34和金属制的右方及左方的横表面部35。切碎轴36跨右方及左方的横表面部35被能够旋转地支承,在切碎轴36安装有许多个切碎刀37,相对于切碎轴36靠上侧及下侧开放。
157.金属制的右方及左方的横表面部38与右方及左方的横表面部35的上部连结,金属制的后表面部39跨后表面部34的上部和右方及左方的横表面部38连结。
158.后表面部39的上边部作为沿着左右方向延伸出的安装部40而设置在切碎装置33,在安装部40设置有4个切缺部41。
159.在右方及左方的横表面部35的前端部开设有连结孔42,在右方及左方的横表面部38的前端部开设有连结孔42。
160.如图9及图10所示,设置有第2罩32。在第2罩32,设置有后表面部32a、右方及左方的横表面部32b、上表面部32c、两个卡合部32d、以及在上表面部32c开设的两个连结孔32e,第2罩32的整体由合成树脂一体地形成为箱状。
161.(第2状态)如图8、图9、图11所示,在第2状态下,不使用撑条22及撑条基部21,如以下的说明那样,将切碎装置33及第2罩32连结。
162.在切碎装置33中,将螺栓18插入到安装部40的切缺部40a,将安装部40碰抵于基板部17。将螺母安装于螺栓18并拧紧,将安装部40与基板部17连结。
163.在切碎装置33中,将右方及左方的横表面部35、38的前端部碰抵于右方及左方的侧板10的后部,将螺栓(未图示)跨连结孔42和侧板10的开口部安装,用螺栓将横表面部35、38的前端部与右方及左方的侧板10的后部连结。
164.将第2罩32的卡合部32d挂在罩撑条19,将第2罩32的上表面部32c载于罩撑条20。将螺栓跨第2罩32的连结孔32e和罩撑条20的开口部安装,用螺栓将第2罩32的上表面部32c与罩撑条20连结。在此情况下,预先变更为适应于第2罩32的罩撑条20。
165.以上的状态是将切碎装置33安装于螺栓18(安装部件)而将切碎装置33与后壁部11连结的第2状态。
166.在切碎装置33中,通过将切碎轴36及切碎刀37旋转驱动,将从排尘口16出来的碎屑用切碎刀37切碎处理,向下方的地面放出。
167.在第2状态下,用螺栓18将切碎装置33的安装部40与后壁部11连结,将沿着基板部17在左右方向上延伸出的安装部40与基板部17连结。
168.第2罩32相对于切碎装置33被配置在上侧,成为将脱谷装置4的后部覆盖的状态。
169.(发明的实施的第1其他形态)螺栓18的数量既可以设定为5个以上,也可以设定为3个以下。
170.也可以代替螺栓18,设置钩状的卡合部件(未图示)、带扣部件(未图示)作为安装部件。
171.(发明的实施的第2其他形态)也可以将基板部17用除后壁部11的后表面部12以外的另外的部件构成,构成为,借助焊接等与后壁部11的后表面部12连结。
172.(发明的实施的第3其他形态)第1罩31和第2罩32也可以相同。也可以将第1罩31构成为作为第2罩32使用,也可以将第2罩32构成为作为第1罩31使用。
173.根据该结构,共同的罩(未图示)在第1状态下被作为第1罩31使用,在第2状态下被作为第2罩32使用。
174.没有将罩撑条20变更的需要,将图7所示的罩撑条20或图11所示的罩撑条20在第1状态及第2状态下共用。
175.(发明的实施的第4其他形态)也可以将第1罩31及第2罩32弃用。根据该结构,不再需要罩撑条19、20。
176.(发明的实施的第5其他形态)本发明不仅对于普通型的联合收割机,对于自脱型的联合收割机也能够适用。
177.〔第2实施方式〕接着,一边参照图12~图20一边对第2实施方式进行说明。
178.在图12~图20中表示了普通型的联合收割机,在图12~图20中,f表示前方,b表示后方,u表示上方,d表示下方,r表示右方,l表示左方。
179.(联合收割机的整体结构)如图12及图13所示,由右方及左方的履带型式的行驶装置202支承着机体201,驾驶部203设置在机体201的前部的右部。脱谷装置204设置在机体201的后部的左部,谷粒箱205及谷粒输送装置206设置在机体201的后部的右部。送料器207与脱谷装置204的前部连结并向前侧延伸出,收割部208与送料器207的前部连结。
180.通过以上的结构,随着机体201的行进,将田地的作物向收割部208导入并收割,将作物经过送料器207输送并向脱谷装置204供给,在脱谷装置204中进行脱谷处理。将由脱谷装置204脱谷处理并回收的谷粒贮存在谷粒箱205,如果谷粒箱205变满,则能够用谷粒输送装置206将谷粒箱205的谷粒排出。
181.(谷粒输送装置的结构)如图12及图13所示,在谷粒输送装置206设置有纵输送部209,中继输送部210、横输送部211、谷粒排出口212及支承箱213等。
182.支承箱213与谷粒箱205的后部的下部连结,能够绕沿着上下方向的轴芯2p1旋转地被机体201的后部支承。纵输送部209的下部能够绕轴芯2p1旋转地安装于支承箱213。
183.沿着上下方向的支承框架214与机体201的后部连结。纵输送部209能够绕轴芯2p1旋转地被环状的支承部件215、216支承,所述支承部件215、216与支承框架214的上部及下部连结。纵输送部209的上部能够绕轴芯2p1旋转地被环状的支承部件217支承,所述支承部件217与谷粒箱205的后部的上部连结。
184.通过以上的结构,纵输送部209经由支承箱213而与谷粒箱205的下部连接,沿着上下方向配置,纵输送部209及支承箱213能够绕轴芯2p1旋转地被支承。
185.如图12、图13、图14、图15所示,在中继输送部210设置有第1部分221和第2部分222。第1部分221被构成为角状,与纵输送部209的上部连结。第2部分222被构成为角状,能够绕沿着水平方向的中心轴2p2上下摆动地安装在第1部分221的横部。中心轴2p2被配置在第1部分221的上下方向上的中央位置,被配置在第1部分221的宽度方向上的中央位置。
186.通过以上的结构,中继输送部210(第1部分221及第2部分222)以沿着水平方向的状态与纵输送部209的上部连结。
187.横输送部211与中继输送部210的第2部分222连结,成为能够绕中继输送部210的中心轴2p2上下摆动地与中继输送部210连结的状态。谷粒排出口212朝下设置在横输送部211的末端部。
188.如图18及图19所示,在横输送部211的端部,朝下安装着防水型式的灯218,安装有将灯218覆盖的合成树脂制的罩219。将金属制的棒状部件在俯视中弯折为沟槽状而构成的保护部件220安装在横输送部211的端部,以沿着罩219的下边部的内表面的方式配置。
189.如图12及图13所示,在谷粒输送装置206中,在纵输送部209、中继输送部210(第1
部分221及第2部分222)、横输送部211的内部配置有螺旋状的输送体(未图示)。通过将输送体旋转驱动,将谷粒箱205的谷粒从支承箱213的内部经过纵输送部209、中继输送部210(第1部分221及第2部分222)、横输送部211的内部输送,从谷粒排出口212排出。
190.(谷粒输送装置的回转的结构)如图12及图13所示,在支承部件215设置有电动马达223,所述电动马达223能够相对于支承框架214及支承部件215将纵输送部209能够绕轴芯2p1旋转驱动。
191.在图12及图13所示的状态下,通过由电动马达223将纵输送部209绕轴芯2p1旋转驱动,将谷粒输送装置206(纵输送部209、中继输送部210(第1部分221及第2部分222)、横输送部211、谷粒排出口212)回转操作。
192.在电动马达223的停止状态下,通过将谷粒箱205及支承箱213绕轴芯2p1(纵输送部209)摆动操作,将谷粒箱205向右侧移动操作,所述右侧远离机体201。由此,能够进行脱谷装置204的谷粒箱205侧的部分、谷粒箱5的脱谷装置204侧的部分的维护作业。
193.(谷粒输送装置的升降的结构)如图12、图13、图14、图15所示,在中继输送部210的第1部分221的横输送部211的相反侧的套筒(boss)部221a,能够绕中心轴2p2上下摆动地支承着第1升降部件231。
194.如图14、图15、图16、图17所示,第1升降部件231被形成为具有沿着上下方向的纵表面部231a、从纵表面部231a的上部在朝向横输送部211的横向上延伸的上表面部231b、以及从纵表面部231a的下部在朝向横输送部211的横向上延伸的下表面部231c的截面槽型形状。
195.如图12、图13、图14、图15所示,在横输送部211连结着托架224,跨第1升降部件231的端部和托架224连结着圆棒状的第2升降部件232,第2升降部件232跨第1升降部件231和横输送部211而安装。横输送部211、中继输送部210的第2部分222、第1升降部件231及第2升降部件232成为能够一体地绕中心轴2p2上下摆动的状态。
196.在中继输送部210的第1部分221连结着托架225,托架225从谷粒箱205向上侧充分地离开。升降缸226跨托架225和第2升降部件232连接,在俯视中配置在第1升降部件231与横输送部211之间。
197.通过以上的结构,通过升降缸226伸缩动作,经由第2升降部件232将横输送部211、中继输送部210的第2部分222及第1升降部件231一体地绕中心轴2p2升降操作。
198.(谷粒输送装置的回转操作及升降操作)在驾驶部203设置有作业者能够操作的右回转开关(未图示)、左回转开关(未图示)、上升开关(未图示)、下降开关(未图示)。如果右回转开关被操作,则如在前述的(谷粒输送装置的回转的结构)中记载那样,由电动马达223将谷粒输送装置206向右回转操作,如果左回转开关被操作,则由电动马达223将谷粒输送装置206向右回转操作。
199.如果上升开关被操作,则如在前述的(谷粒输送装置的升降的结构)中记载那样,升降缸226伸长动作,将横输送部211上升操作,如果下降开关被操作,则升降缸226收缩动作,将横输送部211下降操作。
200.如图13所示,在驾驶部203的左方,在脱谷装置204的前部的上部设置有承接台230。在不使用谷粒输送装置206的状态下,将谷粒输送装置206置于横输送部211被载于承接台230的存放位置2a1(参照图20)。
201.(横输送部的上下摆动位置的检测的结构)如图14、图15、图16、图17所示,在中继输送部210的第1部分221,在俯视中在第2升降部件232侧的部分连结着撑条227,撑条227朝向第1升降部件231延伸出。
202.在撑条227安装有电位差计(potentiometer)型式的高度传感器228,高度传感器228经由撑条227被中继输送部210(第1部分221)支承。
203.高度传感器228从沿着水平方向的方向观察,配置在中继输送部210(第1部分221)的上部与中心轴2p2之间(图14参照)。
204.高度传感器228在俯视中相对于第1升降部件231配置在横输送部211侧的位置,成为配置在第1升降部件231与横输送部211之间的状态(参照图15)。
205.以高度传感器228的检测轴228a从撑条227朝向第1升降部件231突出的方式配置有高度传感器228,高度传感器228的检测轴228a能够绕与中心轴2p2平行的轴芯2p3正反向旋转。
206.臂部229与高度传感器228的检测轴228a连结,从高度传感器228的检测轴228a朝向中心轴2p2延伸出,借助高度传感器228的检测轴228a的正反向的旋转,臂部229成为能够沿着上下方向摆动的状态。
207.在臂部229的端部连结着圆棒状的连接销229a(相当于连接部分),连接销229a从臂部229以与中心轴2p2及轴芯2p3平行的状态朝向第1升降部件231延伸出。臂部229的连接销229a从第1升降部件231延伸的方向观察被配置在第1升降部件231的上表面部231b与下表面部231c之间(参照图16)。
208.借助设置在高度传感器228的内部的弹簧等的施力部件(未图示),将高度传感器228的检测轴228a向图17的逆时针方向施力。由此,臂部229被施力部件向下方施力,臂部229被朝向第1升降部件231的下表面部231c施力,以使臂部229的连接销229a与第1升降部件231的下表面部231c的上表面接触,臂部229成为与第1升降部件231连接的状态。
209.(由高度传感器进行的横输送部的上下摆动位置的检测)通过前述的(横输送部的上下摆动位置的检测的结构),横输送部211的上下摆动位置如以下的说明那样被高度传感器228检测。
210.在图17的实线所示的状态下,假设横输送部211(第1升降部件231)停止了。在该状态下,借助高度传感器228的施力部件,将臂部229朝向第1升降部件231的下表面部231c施力,臂部229的连接销229a与第1升降部件231的下表面部231c的上表面接触。
211.如果通过将横输送部211上升操作,如图17的从实线到双点划线所示,第1升降部件231向上侧摆动,则在臂部229的连接销229a沿着第1升降部件231的下表面部231c滑动的同时,由第1升降部件231的下表面部231c将臂部229的连接销229a抵抗于高度传感器228的施力部件而推起,臂部229追随于第1升降部件231而向上侧摆动。
212.如果通过将横输送部211下降操作,如图17的从双点划线到实线所示,第1升降部件231向下侧摆动,则在臂部229的连接销229a沿着第1升降部件231的下表面部231c滑动的同时,以臂部229的连接销229a借助高度传感器228的施力部件不从第1升降部件231的下表面部231c离开的方式使臂部229追随于第1升降部件231向下侧摆动。
213.对于第1升降部件231的摆动,通过臂部229的连接销229a沿着第1升降部件231的下表面部231c滑动,将臂部229的连接销229a的轨迹与第1升降部件231的轨迹的差吸收。
214.如以上这样,通过随着第1升降部件231的摆动而臂部229摆动,第1升降部件231的位置(上下角度)经由臂部229被传递给高度传感器228,第1升降部件231的位置(上下角度)被高度传感器228检测。
215.高度传感器228通过检测第1升降部件231的位置(上下角度),检测横输送部211的上下摆动位置。
216.通过将高度传感器228的位置在侧视中沿着第1升降部件231的延伸方向变更或将臂部229的长度变更,能够将第1升降部件231的长度(在第1升降部件231的下表面部231c,臂部229的连接销229a接触的部分与中心轴2p2之间的长度)变更。
217.由此,通过将第1升降部件231的长度(在第1升降部件231的下表面部231c中,臂部229的连接销229a接触的部分与中心轴2p2之间的长度)与臂部229的长度的比设定为适当的值,能够将第1升降部件231的摆动变换为对于高度传感器228而言能够没有勉强地进行检测的适当的范围并传递给高度传感器228。
218.(谷粒输送装置的回转操作及升降操作中的控制)如在前述的(谷粒输送装置的回转的结构)中记载那样,设置有回转位置传感器(未图示),所述回转位置传感器在由电动马达223将谷粒输送装置206绕轴芯2p1回转操作的情况下,检测纵输送部209的绕轴芯2p1的位置,检测谷粒输送装置206的回转位置。
219.如在前述的(由高度传感器进行的横输送部的上下摆动位置的检测)中记载那样,由高度传感器228检测横输送部211的上下摆动位置。
220.在作业者将右回转开关及左回转开关、上升开关及下降开关操作而使谷粒输送装置206向存放位置2a1移动的情况下,基于回转位置传感器及高度传感器228的检测,进行以下的说明那样的操作。
221.如图20所示,在作业者借助左回转开关的操作将谷粒输送装置206向左回转操作、横输送部211相对于驾驶部203从右侧接近的情况下(行程2b1),如果横输送部211达到从驾驶部203稍向右侧离开的位置2a2,则谷粒输送装置206自动地被停止操作,警报动作。作业者将上升开关操作,将横输送部211上升操作(行程2b2)。
222.如果横输送部211达到比驾驶部203高的位置2a3,则警报停止,所以作业者将左回转开关操作,将谷粒输送装置206向左回转操作(行程2b3)。如果横输送部211达到存放位置2a1的上方的位置2a4,则谷粒输送装置206自动地被停止操作,警报多次动作而停止。作业者将下降开关操作,将横输送部211下降操作,使谷粒输送装置206向存放位置2a1移动(行程2b4)。
223.在作业者借助右回转开关的操作将谷粒输送装置206向右回转操作、横输送部211相对于驾驶部203从左侧接近的情况下(行程2b5),如果横输送部211达到存放位置2a1的上方的位置2a5,则谷粒输送装置206自动地被停止操作,警报多次动作而停止。作业者将下降开关操作,将横输送部211下降操作,使谷粒输送装置206向存放位置2a1移动(行程2b6)。
224.(发明的实施的第1其他形态)也可以构成为,臂部229从高度传感器228的检测轴228a朝向中心轴2p2的相反侧延伸出,由施力部件将高度传感器228的检测轴228a向图17的顺时针方向施力,使得臂部229的连接销229a与第1升降部件231的下表面部231c的上表面接触。
225.也可以构成为,臂部229从高度传感器228的检测轴228a朝向中心轴2p2延伸出,由
施力部件将高度传感器228的检测轴228a向图17的顺时针方向施力,使得臂部229的连接销229a与第1升降部件231的上表面部231b的下表面接触。
226.也可以构成为,臂部229从高度传感器228的检测轴228a朝向中心轴2p2的相反侧延伸出,由施力部件将高度传感器228的检测轴228a向图17的逆时针方向施力,使得臂部229的连接销229a与第1升降部件231的上表面部231b的下表面接触。
227.也可以构成为,施力部件设置在高度传感器228的外部,与臂部229连接。
228.(发明的实施的第2其他形态)也可以构成为,在第1升降部件231的纵表面部231a开设有沿着第1升降部件231的延伸出方向的长孔(未图示),在该长孔中插入臂部229的连接销229a,将臂部229与第1升降部件231连接。
229.根据该结构,不再需要施力部件。
230.根据该结构,能够构成为,将高度传感器228在俯视中相对于第1升降部件231配置在横输送部211的相反侧。
231.(发明的实施的第3其他形态)也可以臂部229从高度传感器228的检测轴228a朝向中心轴2p2的相反侧延伸出,臂部229与第2升降部件232连接。由高度传感器228检测第2升降部件232的位置,检测横输送部211的上下摆动位置。
232.在该结构中,只要构成为在臂部229开设沿着臂部229的延伸出方向的长孔(未图示)、在该长孔中插入第2升降部件232即可。
233.(发明的实施的第4其他形态)本发明不仅对普通型的联合收割机,对自脱型的联合收割机也能够适用。
234.〔第3实施方式〕接着,一边参照图21~图33一边对第3实施方式进行说明。
235.基于附图对用来实施本发明的方式进行说明。另外,在以下的说明中,将箭头f的方向设为“机体前侧”,将箭头b的方向设为“机体后侧”,将箭头l的方向设为“机体左侧”,将箭头r的方向设为“机体右侧”。
236.〔联合收割机的整体结构〕在图21及图22中表示全秆投入型联合收割机(相当于有关本发明的“作业机”)。在本联合收割机具备行驶机体301。在行驶机体301具备机体框架302和履带行驶装置303。在行驶机体301的前方,设置有将植立谷秆收割的收割部304。在收割部304,具备将植立谷秆耙拢的耙拢卷筒305、将植立谷秆切断的收割刀306、以及将收割谷秆耙拢的耙拢螺旋输送器307。
237.设置有将收割谷秆的全秆脱谷处理的脱谷装置308(相当于有关本发明的“作业装置”及有关本发明的“脱谷装置”)。跨收割部304和脱谷装置308,设置有将收割谷秆朝向脱谷装置308输送的送料器309。在脱谷装置308的右方,与脱谷装置308横向排列设置有将脱谷处理后的谷粒贮存的谷粒箱310。设置有将谷粒箱310内的谷粒排出的谷粒排出装置311。在谷粒箱310的前方设置有驾驶舱312。
238.在脱谷装置308的上部设置有脱粒室313。在脱粒室313,能够绕沿着机体前后方向延伸的旋转轴心3y1旋转地设置有脱粒滚筒314。在脱谷装置308的下部设置有将脱谷处理
物分选的分选部315。在分选部315,具备将脱谷处理物摆动分选的摆动分选装置316、向脱谷处理物输送分选风的风车317、将一次物的谷粒(单粒化谷粒等)回收的一次回收部318和将二次物的谷粒(带枝梗的谷粒等)回收的二次回收部319。
239.〔顶板〕如图23至图25所示,在脱粒滚筒314的上方,设置有将脱粒滚筒314从上方覆盖的顶板320。顶板320以能够绕沿着机体前后方向延伸的摆动轴心3y2摆动开闭的方式被脱谷装置主体308a的左上部支承。在顶板320的背面部,设置有固定送尘阀321及多个(在本实施方式中是八个)可动送尘阀322,以将脱谷处理物朝向脱粒室313的末端部引导。
240.固定送尘阀321不能变更脱谷处理物的引导角度而构成。固定送尘阀321被用螺栓323固定在顶板320。
241.可动送尘阀322能够变更脱谷处理物的引导角度而构成。可动送尘阀322以能够绕沿着上下方向延伸的摆动轴心3z1摆动的方式经由支轴322a被顶板320支承。多个可动送尘阀322被用连结板324连结,以使多个可动送尘阀322能够一体地摆动。设置有用来将多个可动送尘阀322摆动操作的操作杆325。操作杆325的基端部与多个可动送尘阀322中的从前方数第二个可动送尘阀322的支轴322a连结。
242.在支轴322a中的从顶板320朝向上方突出的部分,安装有垫圈326及螺母327。可动送尘阀322经由支轴322a被用垫圈326及螺母327固定在顶板320。
243.在顶板320的表面部的前侧部分,粘贴着用来将顶板320加强的衬垫(liner)328。衬垫328被用螺母329、330、331固定在顶板320。在顶板320设置有与螺母329、330、331对应的螺栓332、333、334。在衬垫328中的与螺栓323对应的部分,形成有用来将螺栓323的头部避让的避让孔328a。避让孔328a由比螺栓323的头部大一些的圆孔构成。在衬垫328中的与螺母327对应的部分,设置有用来将垫圈326避让的避让孔328b。避让孔328b由比垫圈326大一些的圆孔构成。在衬垫328的右缘部中的与螺栓334对应的部分,形成有朝向上方凹入的切缺部328c。
244.如上述那样,避让孔328a由比螺栓323的头部大一些的圆孔构成,并且避让孔328b由比垫圈326大一些的圆孔构成。因而,为了将衬垫328拆下,只要将螺母331放松并且将螺母329、330及操作杆325拆下,即使不将螺栓323、垫圈326及螺母327拆下,也能够将衬垫328拆下。
245.〔侧部罩〕如图21及图26至图30所示,在脱谷装置308的左侧部,能够拆装地设置有侧部罩335。侧部罩335具备第一罩部件336、第二罩部件337、第三罩部件338、以及第四罩部件339。即,侧部罩335被上下及前后分割为四个罩部件而构成。第一罩部件336、第二罩部件337、第三罩部件338及第四罩部件339都相当于有关本发明的“罩部件”。
246.第一罩部件336能够相对于脱谷装置主体308a的左侧部拆装而构成。在第一罩部件336的上部,设置有用来将第一罩部件336位置固定的锁定机构340。锁定机构340构成为,能够相对于设置在脱谷装置主体308a的左侧部处的销341卡合。在第一罩部件336的下部设置有钩342。钩342构成为,能够相对于设置在脱谷装置主体308a的左侧部处的销343钩挂。
247.第二罩部件337能够相对于脱谷装置主体308a的左侧部拆装而构成。在第二罩部件337的上部,设置有用来将第二罩部件337位置固定的前后一对锁定机构344。锁定机构
344构成为,能够相对于设置在脱谷装置主体308a的左侧部处的销345卡合。在第二罩部件337的下部设置有前后一对的钩346。钩346构成为,能够相对于设置在脱谷装置主体308a的左侧部处的销347钩挂。
248.在第一罩部件336的下缘部,以朝向第一罩部件336的内部侧弯折的方式形成有下表面部336a(相当于有关本发明的“第一面部”)。在第二罩部件337的上缘部,以朝向第二罩部件337的内部侧弯折的方式形成有上表面部337a(相当于有关本发明的“第二面部”)。第一罩部件336及第二罩部件337以下表面部336a与上表面部337a对置并且在下表面部336a与上表面部337a之间存在间隙3g的状态配置。
249.第三罩部件338以能够绕沿着机体前后方向延伸的摆动轴心3y3摆动开闭的方式被脱谷装置主体308a的左上部支承。在第三罩部件338的下部,设置有用来将第三罩部件338位置固定的前后一对锁定机构348。锁定机构348构成为,能够对设置在脱谷装置主体308a的左侧部处的销352卡合。
250.第四罩部件339构成为,能够相对于脱谷装置主体308a的左侧部拆装。在第四罩部件339的上部,设置有用来将第四罩部件339位置固定的前后一对的锁定机构349。锁定机构349构成为,能够相对于设置在脱谷装置主体308a的左侧部处的销(图示省略)卡合。在第四罩部件339的下部,设置有前后一对的钩(图示省略)。前述钩构成为,能够相对于设置在脱谷装置主体308a的左侧部处的销(图示省略)钩挂。
251.如图26所示,在第三罩部件338,具备面向脱粒室313侧的内侧罩体350和面向机体横外侧的外侧罩体351。在内侧罩体350的上缘部,以朝向机体横外侧弯折的方式形成有上表面部350a。在内侧罩体350,具备将脱谷处理物朝向分选部315的左右中央侧流下引导的引导部350b。在外侧罩体351的上缘部,以朝向机体横内侧弯折的方式形成有上表面部351a。跨上表面部350a和上表面部351a设置有纵表面部353。上表面部350a、上表面部351a及纵表面部353借助焊接而被一体化。内侧罩体350的纵表面部分与纵表面部353之间的间隙被上表面部350a堵塞,以使得雨水等不会侵入到第三罩部件338的内部。
252.〔定位部〕如图27至图30所示,跨相互上下相邻的第一罩部件336和第二罩部件337,设置有将位于上侧的第一罩部件336和位于下侧的第二罩部件337定位的定位部3p。定位部3p跨第一罩部件336的下缘部和第一罩部件336的上缘部而设置。在定位部3p,具备:突起部336b,设置在第一罩部件336,朝向第二罩部件337突出;以及进入部337b,设置在第二罩部件337,突起部336b进入。
253.突起部336b设置在下表面部336a的前缘部的机体横内侧的端部(右端部)。突起部336b由板状的部分构成,并且与下表面部336a一体地形成。突起部336b在主视中形成为左下角部被切缺的形状。
254.进入部337b设置在上表面部337a的前缘部的机体横内侧的端部(右端部)。进入部337b由朝向机体横外侧(左侧)凹入的切缺部构成。即,突起部336b能够相对于进入部337b沿着切缺方向插拔而构成。在进入部337b的开口端部(右端部),形成有越是开口端(右端)则开口越宽的部分。
255.如图27所示,在将第一罩部件336向脱谷装置主体308a的左侧部安装时,如果在钩342钩挂于销343的状态下将第一罩部件336以下支点朝向脱谷装置主体308a的左侧部侧
(右侧)摆动操作,则突起部336b从上方进入到进入部337b。这样,通过突起部336b进入到进入部337b,将第一罩部件336和第二罩部件337用定位部3p定位(特别是前后方向的定位)。
256.此外,在将第一罩部件336从脱谷装置主体308a的左侧部拆下时,如果在钩342钩挂于销343的状态下将第一罩部件336以下支点朝向机体横外侧(左侧)摆动操作,则突起部336b从进入部337b向上方脱出。这样,通过突起部336b从进入部337b脱出,由定位部3p进行的定位被解除。
257.这里,如上述那样,突起部336b在主视中形成为左下角部被切缺的形状。由此,在第一罩部件336安装于脱谷装置主体308a的左侧部的状态下,在将第二罩部件337从脱谷装置主体308a的左侧部拆下(在钩346钩挂于销347的状态下将第二罩部件337以下支点朝向机体横外侧(左侧)摆动操作)时,进入部337b的切缺方向的里侧端部(左端部)不会钩挂于突起部336b的左下角部,而能够将第二罩部件337从脱谷装置主体308a的左侧部拆下。
258.〔间隙遮盖部〕如图27至图31所示,在上表面部337a,设置有将下表面部336a与上表面部337a之间的间隙3g遮盖的间隙遮盖部337c(在图29中施以了淡墨色的部分)。间隙遮盖部337c由从上表面部337a朝向上方以弯曲状(图31所示的主视)延伸出的部分构成,并且与上表面部337a一体地形成。间隙遮盖部337c遍及上表面部337a的大致整体设置。具体而言,间隙遮盖部337c跨上表面部337a的前缘部的右端部和上表面部337a的后端部而设置。
259.如图31所示,间隙遮盖部337c从上表面部337a延伸出到比下表面部336a的缘端靠侧部罩335的内部侧的平面位置。间隙遮盖部337c的缘端位于下表面部336a的厚度t的范围内。换言之,间隙遮盖部337c的缘端位于下表面部336a的上表面与下表面部336a的下表面之间。
260.〔向送料器的动力传递构造〕如图32及图33所示,在脱粒滚筒314的前方,以沿着机体左右方向延伸的状态设置有被输入将脱粒滚筒314驱动的动力的脱粒滚筒输入轴354。跨脱粒滚筒输入轴354和风车317的旋转轴317a(参照图31),设置有将风车317的旋转轴317a的动力向脱粒滚筒输入轴354传递的带传动机构355。在带传动机构355,具备设置在风车317的旋转轴317a处的输出带轮(图示省略)、设置在脱粒滚筒输入轴354的输入带轮356、以及被卷绕在前述输出带轮及输入带轮356的传动带357。
261.在送料器309的后端部,以沿着机体左右方向延伸的状态设置有被输入将送料器309驱动的动力的送料器输入轴358。跨脱粒滚筒输入轴354和送料器输入轴358,设置有将脱粒滚筒输入轴354的动力向送料器输入轴358传递的带传动机构359。在带传动机构359,具备设置在脱粒滚筒输入轴354的输出带轮360、设置在送料器输入轴358的输入带轮361、以及被卷绕在输出带轮360及输入带轮361的传动带362。
262.设置有将由带传动机构359进行的向送料器输入轴358的动力传递通断的收割离合器机构363。收割离合器机构363由带张紧离合器构成。在收割离合器机构363,具备与传动带362接触的张紧辊364、能够绕沿着机体左右方向延伸的摆动轴心3x1摆动地构成并支承张紧辊364的张紧臂365、以及将张紧臂365牵拉操作的缆线(cable wire)366。缆线366经由张紧弹簧367而与张紧臂365连结。
263.缆线366经由撑条368被脱谷装置主体308a的左侧部支承。在脱谷装置主体308a的
左侧部,具备沿着上下方向延伸的纵框架369、沿着机体前后方向延伸的前后框架370、以及跨纵框架369和前后框架370斜着延伸的斜框架371。撑条368以从斜框架371朝向左方延伸出的状态被斜框架371悬臂支承。
264.在撑条368,具备支承缆线366的支承部368a以及与斜框架371连结的连结部368b。支承部368a在从连结部368b朝向前方延伸出的状态下被用螺栓368c固定在连结部368b的左端部。缆线366以沿着支承部368a的左侧面及支承部368a的弯曲部分的状态配设。
265.〔其他实施方式〕(1)在上述实施方式中,有关本发明的“作业装置”是脱谷装置308,侧部罩335能够拆装地设置在脱谷装置308的横侧部。但是,本发明并不限定于有关上述实施方式的结构。例如,有关本发明的“作业装置”也可以是送料器309、发动机,侧部罩335也可以能够拆装地设置在送料器309的侧部、发动机的侧部。
266.(2)在上述实施方式中,侧部罩335被上下及前后分割为四个罩部件而构成。但是,侧部罩335也可以被分割为两个或五个以上的罩部件而构成。此外,侧部罩335也可以仅在前后被分割而构成,或者也可以仅在上下被分割而构成。
267.(3)在上述实施方式中,定位部3p跨相互上下相邻的第一罩部件336和第二罩部件337而设置。但是,定位部3p也可以跨相互前后相邻的两个罩部件而设置。
268.(4)在上述实施方式中,突起部336b设置在第一罩部件336,进入部337b设置在第二罩部件337。但是,也可以有关本技术发明的“突起部”设置在第二罩部件337,有关本技术发明的“进入部”设置在第一罩部件336。
269.(5)在上述实施方式中,突起部336b由板状的部分构成。但是,突起部336b也可以由板状以外的形状的部分(例如棒状的部分)构成。
270.(6)在上述实施方式中,进入部337b由切缺部构成。但是,进入部337b也可以由开口部(例如长孔)构成。
271.(7)在上述实施方式中,间隙遮盖部337c设置在上表面部337a。但是,间隙遮盖部也可以设置在下表面部336a。或者,间隙遮盖部也可以设置在下表面部336a及上表面部337a。
272.(8)在上述实施方式中,间隙遮盖部337c由从上表面部337a朝向上方以弯曲状延伸出的部分构成。但是,间隙遮盖部337c也可以由从上表面部337a朝向上方以铅直状延伸出的部分(例如纵表面部分)构成。
273.(9)本发明除了全秆投入型联合收割机以外,也能够对自脱型联合收割机利用。此外,除了拖拉机、插秧机等农业作业机以外,也能够对工程作业机利用。
274.附图标记说明〔第1实施方式〕4
ꢀꢀꢀꢀꢀ
脱谷装置8
ꢀꢀꢀꢀꢀ
脱粒滚筒11
ꢀꢀꢀꢀ
后壁部16
ꢀꢀꢀꢀ
排尘口17
ꢀꢀꢀꢀ
基板部18
ꢀꢀꢀꢀ
螺栓(安装部件)
19
ꢀꢀꢀꢀ
罩撑条20
ꢀꢀꢀꢀ
罩撑条21
ꢀꢀꢀꢀ
撑条基部22
ꢀꢀꢀꢀ
撑条23
ꢀꢀꢀꢀ
排尘罩24
ꢀꢀꢀꢀ
后表面部24a
ꢀꢀꢀ
下部25
ꢀꢀꢀꢀ
横表面部26
ꢀꢀꢀꢀ
延伸出部29
ꢀꢀꢀꢀ
排出部31
ꢀꢀꢀꢀ
第1罩32
ꢀꢀꢀꢀ
第2罩33
ꢀꢀꢀꢀ
切碎装置40
ꢀꢀꢀꢀ
安装部〔第2实施方式〕205
ꢀꢀꢀ
谷粒箱206
ꢀꢀꢀ
谷粒输送装置209
ꢀꢀꢀ
纵输送部210
ꢀꢀꢀ
中继输送部211
ꢀꢀꢀ
横输送部212
ꢀꢀꢀ
谷粒排出口226
ꢀꢀꢀ
升降缸227
ꢀꢀꢀ
撑条228
ꢀꢀꢀ
高度传感器229
ꢀꢀꢀ
臂部229a
ꢀꢀ
连接销(连接部分)231
ꢀꢀꢀ
第1升降部件231a
ꢀꢀ
纵表面部231b
ꢀꢀ
上表面部231c
ꢀꢀ
下表面部232
ꢀꢀꢀ
第2升降部件2p2
ꢀꢀꢀ
中心轴〔第3实施方式〕308
ꢀꢀꢀ
脱谷装置(作业装置、脱谷装置)335
ꢀꢀꢀ
侧部罩336
ꢀꢀꢀ
第一罩部件(罩部件)336a
ꢀꢀ
第一面部336b
ꢀꢀ
突起部337
ꢀꢀꢀ
第二罩部件(罩部件)
337a
ꢀꢀ
第二面部337b
ꢀꢀ
进入部337c
ꢀꢀ
间隙遮盖部338
ꢀꢀꢀ
第三罩部件(罩部件)339
ꢀꢀꢀ
第四罩部件(罩部件)3g
ꢀꢀꢀꢀ
间隙3p
ꢀꢀꢀꢀ
定位部。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1