农作物收获系统的制作方法
农作物收获系统
1.相关申请的交叉引用
2.本技术主张于2019年12月25日申请的日本技术编号2019-234339的优先权,并在此引用其全部内容。
技术领域
3.本公开涉及农作物收获系统。
背景技术:
4.近年来,为了实现农业作业的自动化,提出用于自动地收获农作物的收获装置。例如作为用于收获果实等的收获装置,例如考虑在机械臂的前端安装了具有剪刀形状的刀的收获工具的装置。这样的收获装置例如搭载于能够在田地、果园等农场内自动地行驶的移动装置,并向成为收获对象的个体进行移动。然后,收获装置能够通过利用剪刀形状的收获工具切断果柄或者枝条,从主茎或者枝条分离收获对象而进行收获。
5.这里,收获工具与作为收获对象的植物直接接触。因此,在农场内培育的某一个体产生疾病的情况下,有由于使用与产生了疾病的个体接触的收获工具对其它的个体进行收获,而该疾病在农场内扩散的担忧。该情况下,虽然也考虑操作者手动地对收获装置进行消毒,但消毒作业花费功夫,而与收获作业相关的作业效率降低。
6.专利文献1:日本特开2000-92952号公报
技术实现要素:
7.本公开的目的在于提供能够自动地对收获装置的至少例如收获工具等与收获对象物直接接触的位置进行消毒的农作物收获系统,该收获装置能够自动地对收获对象物进行收获。
8.在本公开的一方式中,农作物收获系统具备:移动装置,构成为能够在进行收获作业的区域亦即收获作业区域内进行移动;收获装置,搭载于上述移动装置并与成为收获对象物的农作物接触来收获上述收获对象物;消毒装置,具有对上述收获装置中至少与上述收获对象物接触的位置亦即消毒对象位置进行消毒的功能;消毒需要与否判定处理部,能够执行判定对上述消毒对象位置的消毒的需要与否的消毒需要与否判定处理;以及消毒动作处理部,在通过上述消毒需要与否判定处理判定为需要消毒的情况下能够执行使上述收获装置或者上述消毒装置的至少一方驱动来对上述消毒对象位置进行消毒的消毒动作。
9.据此,能够自动地至少对与收获对象物直接接触的位置亦即消毒对象位置进行消毒。由此,不需要操作者利用手动作业对收获装置进行消毒,所以与操作者利用手动作业对收获装置进行消毒的情况相比能够减少消毒作业的麻烦,其结果,能够实现与收获作业相关的作业效率的提高。并且,与操作者利用手动作业对收获装置进行消毒的情况相比,也不容易产生操作者忘记消毒等失误。因此,即使在农场内的某一个体产生疾病的情况下,也能够尽量抑制疾病经由收获工具在农场内扩散。
附图说明
10.通过参照附图并且下述的详细的记述,本公开的上述目的以及其它的目的、特征、优点变得更加明确。
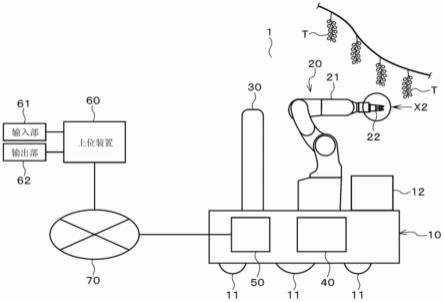
11.图1是示意地表示第一实施方式的农作物收获系统的构成的一个例子的图,
12.图2是对第一实施方式的农作物收获系统放大图1的x2部分示出的图,
13.图3是对第一实施方式的农作物收获系统示意地示出消毒装置的构成的一个例子的图,
14.图4是对第一实施方式的农作物收获系统示意地示出消毒装置的喷射部以及排出传感器的构成的一个例子的俯视图,
15.图5是表示第一实施方式的农作物收获系统的电构成的一个例子的框图,
16.图6是示意地表示应用第一实施方式的农作物收获系统的农场的构成的一个例子的俯视图,
17.图7是对第一实施方式的农作物收获系统示出通过控制装置执行的消毒相关的主流程的一个例子的图,
18.图8是对第一实施方式的农作物收获系统示出消毒需要与否判定处理的一个例子的图,
19.图9是对第一实施方式的农作物收获系统示出消毒动作处理的一个例子的图,
20.图10是对第二实施方式的农作物收获系统示出消毒需要与否判定处理的一个例子的图,
21.图11是对第三实施方式的农作物收获系统示出消毒需要与否判定处理的一个例子的图,
22.图12是对第四实施方式的农作物收获系统示出消毒需要与否判定处理的一个例子的图,
23.图13是对第五实施方式的农作物收获系统示出消毒需要与否判定处理的一个例子的图,
24.图14是对第六实施方式的农作物收获系统示出消毒需要与否判定处理的一个例子的图,
25.图15是示意地表示应用第七实施方式的农作物收获系统的农场的构成的一个例子的俯视图,
26.图16是对第七实施方式的农作物收获系统示出通过控制装置执行的消毒相关的主流程的一个例子的图。
具体实施方式
27.以下,参照附图对多个实施方式进行说明。此外,在各实施方式中对实际相同的构成附加相同的附图标记并省略说明。
28.(第一实施方式)
29.以下,参照图1~图9对第一实施方式进行说明。
30.[农场的构成]
[0031]
图1所示的农作物收获系统1例如是用于在田地、果园、塑料大棚或者所谓的植物
工厂那样的农场中,收获在农场内培育的农作物t的系统。在本实施方式中,例如如图6所示,例如假定塑料大棚或者植物工厂作为农场。
[0032]
例如在图6所示那样的布局的农场90中使用农作物收获系统1。农场90例如具备多个垄道91、多个导轨92、以及多个跟踪线93。各垄道91具有多个栽培设备911。栽培设备911用于栽培成为收获对象的农作物t。在直线上配置许多的栽培设备911构成一个垄道91。一个垄道91向一个方向例如延伸十数m~数十m左右。在农场90内,多个垄道91以平行的方式等间隔地相邻配置。
[0033]
导轨92设置在相邻的两个垄道91之间,并沿着各垄道91延伸。由两条导轨92构成一组。跟踪线93例如通过粘贴,或者印刷,或者描绘设置于农场90的地面,并连接各导轨92间。该情况下,将设置有导轨92的区域设为收获作业区域901。另外,将收获作业区域901的外侧的区域且为连接各收获作业区域901的区域,此时是设置有跟踪线93的区域设为连接区域902。
[0034]
另外,农场90能够具备多个标志94、95。标志94、95表示收获作业区域901与连接区域902的边界,或者跟踪线93的分支点。在本实施方式的情况下,标志94设置在收获作业区域901与连接区域902的边界附近,详细而言设置在连接区域902内且为即将进入收获作业区域901之前的位置。另外,标志95设置于从横跨各收获作业区域901设置的跟踪线93向各收获作业区域901进行分支的分支点。标志94、95能够由能够通过磁、电波、图像、声波及其它的方法非接触地进行信息的传递的信息传递介质构成。具体而言,标志94、95例如能够由rfid、二维码或者磁性标记等构成。
[0035]
[农作物收获系统的构成]
[0036]
接下来,对农作物收获系统1进行说明。如图1所示,农作物收获系统1具备移动装置10、收获装置20、位置信息获取装置30、消毒装置40、以及控制装置50。移动装置10搭载收获装置20、位置信息获取装置30、消毒装置40、以及控制装置50。移动装置10例如具有车轮11、用于驱动该车轮11的未图示的马达等。而且,移动装置10能够根据来自搭载于移动装置10的控制装置50的指示自主地,或者根据来自以能够通信的方式与控制装置50连接的上位装置60的指示,在农场90内行驶。由此,移动装置10能够使搭载于移动装置10的收获装置20、位置信息获取装置30、消毒装置40、以及控制装置50移动至农场90内的收获对象物t等目标位置。
[0037]
在本实施方式的情况下,虽然详细内容未图示,但车轮11具有与地上或者农场90的地面接触的轮胎部分、和与导轨92接触的踏面部分。由此,移动装置10构成为能够在地上或者农场90的地面上、和导轨92上双方行驶。移动装置10在地上或者农场90的地面上行驶的情况下,能够利用搭载于移动装置10的照相机等识别跟踪线93,并沿着跟踪线93移动。另外,移动装置10在导轨92上移动时,车轮11的踏面部分以物理的方式被导轨92引导而能够沿着导轨92移动。
[0038]
移动装置10也可以搭载回收箱12。回收箱12是用于收容并回收通过收获装置20收获的收获对象物t的箱。回收箱12例如形成为上侧开口的容器状,搭载于移动装置10。此外,例如在农场90设定传送带等那样的搬运收获对象物t的装置的情况下,能够省略回收箱12。另外,回收箱12也可以构成为通过与移动装置10不同的移动装置,移动为追随该移动装置10。
[0039]
收获装置20构成为搭载于移动装置10,且能够与移动装置10一体地移动。收获装置20具有与成为收获对象物的农作物t接触并对收获对象物t进行收获的功能。例如如图1所示,收获装置20能够构成为具有多关节的机械臂21、和安装于机械臂21的指尖部的收获工具22。
[0040]
机械臂21能够在机械臂21的可动范围内任意地变更收获工具22的位置、姿势。如图2所示,收获工具22例如构成为具有刀部221的剪刀形状,通过刀部221与收获对象物t的果柄或者枝条直接接触并进行切断,能够对收获对象物t进行收获。此外,收获工具22并不限定于剪刀状的工具,例如也可以是具有锯齿状的刀的工具,也可以是其它的形状。
[0041]
位置信息获取装置30例如具有通过利用使用了磁、电波、图像、影像的方法中至少一个,非接触地获取移动装置10的周围的信息,作为移动装置10的当前位置的位置信息的功能。作为使用磁、电波、图像获取移动装置10的当前位置的位置信息的方法,例如有rfid、二维码、磁性标记、视觉装置、gps等。此外,rfid是radio frequency identifier:射频识别的简称。另外,gps是global positioning system:全球定位系统的简称。通过使位置信息获取装置30为使用了gps的装置,能够获取移动装置10的当前位置的位置信息。
[0042]
另外,作为利用使用磁的磁性标记,使用电波的rfid,或者使用图像的二维码,获取移动装置10的位置信息的方法,例如考虑以下那样的构成。即,使用磁性标记,rfid,或者二维码,作为能够记录位置信息的记录介质,并设置在农场90内的移动装置10的移动路径上。而且,使磁性标记、rfid、或者二维码记录其设置位置的位置信息,作为移动装置10的移动路径的标志94、95。位置信息获取装置30能够通过分别使用磁,电波,或者照相机等读取设置在路径上的磁性标记,rfid,或者二维码,来获取农场90内的移动装置10的当前位置的位置信息。
[0043]
另外,作为使用图像或者影像,获取移动装置10的当前位置的位置信息的方法,例如有以下那样的方法。即,例如控制装置50预先记录移动装置10的移动路径上的周围的景色的图像或者影像。位置信息获取装置30获取移动装置10的周围的景色的图像或者影像,作为移动装置10的当前位置的位置信息。该情况下,控制装置50能够对在移动装置10的移动中由位置信息获取装置30获取的图像或者影像与预先记录的景色的图像或者影像进行比较,并将一致比例最多的地点估计为移动装置10的当前位置。
[0044]
此外,位置信息获取装置30也可以并不一定是搭载于移动装置10并与移动装置10一起移动的构成。位置信息获取装置30例如也可以由设置于农场90的构造物的一台或者多台的照相机等构成。在位置信息获取装置30由设置于农场90的构造物的照相机等构成的情况下,位置信息获取装置30能够构成为获取在农场90内移动的移动装置10的图像或者影像作为移动装置10的位置信息,并基于该图像或者影像估计移动装置10的位置。
[0045]
消毒装置40具有对收获装置20中至少与收获对象物t接触的位置亦即消毒对象位置进行消毒的功能。在本实施方式的情况下,收获装置20通过安装于机械臂21的指尖部的剪刀形状的收获工具22切断收获对象物t的例如果柄或者枝条来对收获对象物t进行收获。因此,在本实施方式的情况下,收获装置20中与收获对象物t直接接触的位置是图2所示的收获工具22的刀部221。因此,在本实施方式中,消毒对象位置至少包含收获工具22的刀部221。因此,在本实施方式的情况下,刀部221也称为消毒对象位置221。
[0046]
如图3所示,消毒装置40例如具有通过对包含作为消毒对象位置的收获工具22的
刀部221的位置雾状地喷射消毒液,换句话说喷雾消毒液,对包含刀部221的刀部221周边部分进行消毒的功能。在本实施方式中,作为消毒液,例如能够使用浓度约70%的乙醇。该情况下,消毒液例如能够为将乙醇作为主剂的除菌用酒精制剂。该消毒液也能够使用于餐具等与食品接触的器材的卫生管理或者食品本身的正面除菌,与其它的酒精制剂相比也能够降低对金属的腐蚀。
[0047]
消毒装置40搭载于移动装置10。如图3所示,消毒装置40具有消毒液罐41、喷射部42、覆盖部件43、泵44、三通电磁阀45、以及喷射传感器46。消毒液罐41与泵44之间、泵44与三通电磁阀45之间、三通电磁阀45与喷射部42之间、以及三通电磁阀45与消毒液罐41之间分别通过配管471、472、473、474连接。
[0048]
消毒液罐41是用于存积消毒液的罐。消毒液罐41例如由具有遮光性以及耐药性的部件构成,例如构成为能够通过盖等进行封闭。另外,消毒液罐41构成为能够存积足以进行多次收获工具22的消毒的量的消毒液。消毒液罐41设置在移动装置10中能够通过从外部的操作补充消毒液的位置。
[0049]
例如能够通过操作者的手动作业进行向消毒液罐41的消毒液的补充。另外,消毒液的补充也可以构成为例如在农场90内设置存积更大量的消毒液的存积槽,移动装置10移动至该存积槽而消毒装置40自身从该存积槽自动地补充到消毒液罐41内。
[0050]
另外,消毒液罐41具有液量传感器411。液量传感器411安装于消毒液罐41的规定的高度位置。消毒液罐41例如构成为具有电极等,能够基于电极的电阻值或者静电电容的变化等,检测消毒液罐41内的消毒液的液面的高度位置。液量传感器411与控制装置50连接,在消毒液罐41内的消毒液的液面低于液量传感器411的设置位置的情况下,换句话说在消毒液罐41内的消毒液的余量低于规定量的情况下,对控制装置50输出消毒液的余量降低的主旨的检测信号。
[0051]
喷射部42例如是喷嘴且具有以雾状大范围喷射消毒液的功能,并朝向覆盖部件43的内部设置。在本实施方式的情况下,消毒装置40具有一个喷射部42。但是,消毒装置40也可以具有多个喷射部42。在消毒装置40具有多个喷射部42的情况下,优选各喷射部42构成为以不同的角度喷射清洗液。
[0052]
这里,若从喷射部42喷雾的消毒液的飞沫附着于收获装置20、其它的装置、不成为消毒的对象的周围的装置或者植物、或者已经收获的收获对象物等,则有对该装置的动作、植物的培育、收获对象物的品质等造成负面影响的担忧。另外,也假定在户外使用本实施方式的农作物收获系统1。该情况下,若从喷射部42喷雾的消毒液被风吹散,则消毒液不会碰到作为消毒的对象的收获工具22,其结果,不能够确定对收获工具22进行消毒。
[0053]
因此,消毒装置40具有覆盖部件43。喷射部42的周围被覆盖部件43覆盖。覆盖部件43用于防止从喷射部42喷射的消毒液向周围飞散。另外,覆盖部件43用于防止从喷射部42喷射的消毒液被风吹走。
[0054]
该情况下,覆盖部件43覆盖喷射部42的周围中至少与喷射部42对置的一侧。换句话说,覆盖部件43接受从喷射部42喷射的消毒液抑制该消毒液向覆盖部件43的外部飞散。在本实施方式的情况下,覆盖部件43在移动装置10中设置在机械臂21的可动范围内。而且,覆盖部件43由金属或者树脂制构成为容器状,且至少一部分开口。在本实施方式的情况下,覆盖部件43在上表面具有开口部431。在进行消毒时,收获工具22从覆盖部件43的开口部
431插入到覆盖部件43的内侧。然后,喷射部42朝向插入到覆盖部件43内的收获工具22喷雾消毒液。
[0055]
泵44、三通电磁阀45、以及喷射传感器46与控制装置50电连接,并接受控制装置50的控制进行驱动。泵44设置在消毒液罐41与三通电磁阀45之间,吸出存积在消毒液罐41内的消毒液并向三通电磁阀45侧喷射。
[0056]
三通电磁阀45例如是液体用的螺线管阀。三通电磁阀45具有根据来自控制装置50的指示择一地切换图3的黑色箭头所示的路径也就是将从泵44排出的消毒液供给至喷射部42的路径、和图3的空心箭头所示的路径也就是使从泵44排出的消毒液返回到消毒液罐41的路径的功能。
[0057]
此外,在以下的说明中,也有将图3的黑色箭头所示的路径也就是将从泵44排出的消毒液供给至喷射部42的路径称为喷射路径j的情况。另外,也有将图3的空心箭头所示的路径也就是将从泵44供给的消毒液供给至喷射部42的路径称为返回路径r的情况。即,在本实施方式中,喷射路径j如图3的黑色箭头所示,是指从消毒液罐41经由泵44以及三通电磁阀45到喷射部42的路径。另外,返回路径r如图3的空心箭头所示,是指从消毒液罐41经由泵44以及三通电磁阀45再次返回到消毒液罐41的路径。
[0058]
三通电磁阀45在未施加驱动电压而未驱动螺线管的断开状态也就是初始状态下,关闭从泵44到喷射部42的喷射路径j,并打开从泵44到消毒液罐41的返回路径r。若在该状态下驱动泵44,则消毒液罐41的消毒液被泵44吸出并通过三通电磁阀45,再次返回到消毒液罐41,从而在消毒液罐41、泵44、三通电磁阀45之间循环。由此,构成喷射路径j的配管也就是从消毒液罐41到喷射部42的配管471、472、473中连接消毒液罐41与泵44的配管471、以及连接泵44与三通电磁阀45的配管472内充满消毒液,并且位于泵44的排出侧的配管472内的压力升高。
[0059]
另外,三通电磁阀45若被施加驱动电压而成为螺线管驱动的接通状态,则关闭从泵44到消毒液罐41的返回路径r,并打开从泵44到喷射部42的喷射路径j。由此,从泵44排出的消毒液供给至喷射部42,并从喷射部42喷射消毒液。
[0060]
这里,有尽量精密地控制消毒液的喷射,并缩短喷射时间尽量抑制消毒液的消耗量的要求。因此,在本实施方式中,一次的喷射时间例如假定零点几秒至两秒左右。该情况下,若构成为将喷射路径j从泵44直接连接至喷射部42,换句话说构成为不具有包含三通电磁阀45的返回路径r,则在喷射路径j的配管内残留空气的情况下,在通过消毒液推出该空气之后从喷射部42喷射消毒液。因此,从开始泵44的驱动,到在喷射部42中实际喷射消毒液为止的期间产生延迟。该情况下,为了可靠地对收获工具22的刀部221进行消毒,需要延长消毒液的喷射时间,其结果,消毒液的消耗量也增大。
[0061]
因此,在本实施方式中,消毒装置40在从喷射部42喷射消毒液之前,在打开返回路径r的状态下使泵44动作规定期间,例如10秒~1分钟左右,使消毒液在消毒液罐41、泵44、三通电磁阀45之间循环。由此,排除构成喷射路径j的配管471、472、473中至少从消毒液罐41到三通电磁阀45的配管471、472内的空气并充满消毒液,并且配管472内的压力升高。其后,若使三通电磁阀45为接通状态打开喷射路径j,则从使三通电磁阀45为接通状态起几乎无延迟地从喷射部42喷射消毒液,另外,喷射空气的可能性也降低。由此,能够精密地控制消毒液的喷射,能够缩短喷射时间尽量抑制消毒液的消耗量。
[0062]
喷射传感器46用于检测是否实际从喷射部42喷射消毒液。这里,作为用于检测是否从喷射部42喷射消毒液的喷射传感器46,考虑压力传感器、流量传感器、雨滴传感器或者结露传感器等。然而,在如本实施方式那样,少量短时间内的消毒液的喷雾的情况下,认为压力传感器、流量传感器、雨滴传感器或者结露传感器由于以下的理由而不适合。
[0063]
即,在消毒液的喷射的检测使用压力传感器的情况下,考虑检测喷射部42近前的配管内的压力,并基于该压力的变化估计喷射部42的喷射状态。但是,在使用压力传感器估计消毒液的喷射的方法中,需要一定程度长时间的测量,而认为不适合短时间的喷射。因此,认为压力传感器在如本实施方式那样需要比较短时间的检测的情况下不适合。
[0064]
另外,在消毒液的喷射的检测使用流量传感器的情况下,考虑检测喷射部42近前的配管内的消毒液的流量,并基于该流量的变化估计喷射部42的喷射状态。但是,一般而言流量传感器昂贵,特别是能够检测微量的流量的流量传感器更昂贵。因此,认为流量传感器在如本实施方式那样一次喷射的消毒液的量比较少量的情况下,不适合检测该消毒液的喷射。
[0065]
另外,雨滴传感器或者结露传感器基于根据表面润湿而变化的电阻值,检测是否润湿。在使用这样的雨滴传感器或者结露传感器的情况下,在从喷射部42喷射的消毒液附着的位置设置雨滴传感器或者结露传感器,根据检测到该传感器的电阻值的变化,能够估计为喷射了消毒液。但是,雨滴传感器或者结露传感器到表面润湿至电阻值变化的程度为止需要一定程度的时间。并且,雨滴传感器或者结露传感器一旦表面润湿检测到消毒液,则为了下次使用,需要等待至表面干燥。并且,雨滴传感器或者结露传感器也由于结露等其它的液体的附着而电阻值变化,所以特别是在塑料大棚内等高温多湿的环境中使用的情况下,误检测的可能性容易变高。由于这些情况,认为雨滴传感器、结露传感器在如本实施方式那样需要比较短时间的检测,而且假定在高温多湿的环境下的使用的情况下并不适合。
[0066]
因此,在本实施方式中,喷射传感器46使用光学式的传感器即所谓的光电传感器。该情况下,喷射传感器46是反射型的光电传感器,如图4所示,具有发光部461和受光部462。喷射传感器46从发光部461朝向喷射部42的喷射区域例如照射可见光或者红外光等光,并通过受光部462接收反射的光。然后,喷射传感器46基于照射量与受光量之差检测消毒液的有无。该情况下,图4中以网格的图案示出的部分成为喷射传感器46的检测区域d。喷射传感器46被调整为从喷射部42喷射的消毒液进入喷射传感器46的检测区域d。
[0067]
光学式传感器由于光本身高速,而且,传感器电路全部由电子部件构成而不包含机械的动作时间,所以与压力传感器、流量传感器、以及雨滴传感器或者结露传感器相比响应时间非常短。另外,光学式传感器能够非接触地检测消毒液,所以不容易受到周围的湿度、结露等的影响,并且,也不如雨滴传感器、结露传感器那样需要到下次使用为止的待机时间等。
[0068]
在本实施方式中,通过采用光学式传感器作为喷射传感器46,能够准确并且在短时间大致实时地检测消毒液的喷射状况。而且,通过准确并且在短时间大致实时地检测消毒液的喷射状况,农作物收获系统1能够精密地控制消毒液的喷射,其结果,能够抑制消毒液的使用量。
[0069]
此外,消毒装置40并不限定于喷射消毒液进行消毒的装置。消毒装置40也可以构成为例如通过将作为消毒对象位置的收获工具22的刀部221浸入充满消毒液的容器内来进
行消毒。另外,消毒装置40也能够采用使收获工具22的刀部221与包含消毒液的布状的物体接触,将具有灭菌效果的例如60度以上的热风或者热水吹送至收获工具22的刀部221,使收获工具22的刀部221接近发热体,或者向收获工具22的刀部221照射具有灭菌效果的紫外线等光这样的方式。
[0070]
如图5所示,控制装置50例如以具有cpu501、和rom、ram、以及能够改写的闪存等存储区域502的微型计算机为主体构成。控制装置50控制移动装置10、收获装置20、位置信息获取装置30、以及消毒装置40的驱动。如图1所示,控制装置50例如也可以经由lan、wan,或者因特网、移动电话线路等电气通信线路70以能够通信的方式与上位装置60连接。该情况下,上位装置60例如既可以设置在农场90内,也可以设置在农场90的外部。另外,上位装置60也可以通过电缆等与控制装置50直接连接。
[0071]
上位装置60例如是服务器、个人计算机等,具有输入部61以及输出部62。输入部61例如是键盘、鼠标、触摸面板等用户界面。输出部62例如是显示器、扬声器等。用户也能够通过使用输入部61以及输出部62,经由电气通信线路70,对农作物收获系统1进行远程操作。
[0072]
图5所示的存储区域502存储农作物收获系统用的程序。控制装置50通过在cpu501中执行农作物收获系统用的程序,通过软件虚拟地实现地图制成处理部51、移动量获取处理部52、当前位置估计处理部53、消毒需要与否判定处理部54、以及消毒动作处理部55等。此外,例如也可以作为与控制装置50一体的集成电路以硬件的方式实现这些地图制成处理部51、移动量获取处理部52、当前位置估计处理部53、消毒需要与否判定处理部54、以及消毒动作处理部55。
[0073]
地图制成处理部51能够执行地图制成处理。地图制成处理包含基于操作者的输入,在数据上制成包含图6所示的收获作业区域901以及连接区域902的农场90内的地图的处理。该情况下,操作者能够使用上位装置60的输入部61,制成地图。另外,地图制成处理部51能够经由电气通信线路70或者经由电气布线将在外部制成的农场90的地图的数据下载至控制装置50。
[0074]
并且,在位置信息获取装置30例如为立体照相机、tof照相机、结构光扫描仪等能够测量三维的空间以及物体的视觉装置的情况下,地图制成处理部51能够基于从作为视觉装置的位置信息获取装置30获取的视觉信息,制成农场90内的地图。此外,tof是time of flight:飞行时间的简称。地图制成处理部51能够基于在移动装置10在农场90内移动的同时从位置信息获取装置30获取的周围的视觉信息,制成农场90内的地图。该情况下,移动装置10既可以根据来自控制装置50或者上位装置60的指示自主地在农场90内移动,例如也可以通过由用户操作上位装置60的输入部61在农场90内进行移动。
[0075]
移动量获取处理部52能够执行移动量获取处理。移动量获取处理包含获取移动装置10的移动量的处理。该情况下,移动量获取处理部52例如能够构成为接受来自测量移动装置10的行驶用的马达的转数的编码器的测量结果,测定车轮11的转数,并根据该车轮11的转数测定移动装置10的移动量也就是行驶距离。移动量获取处理部52能够在移动装置10的移动中随时获取移动装置10的移动量。通过移动量获取处理获取的移动装置10的移动量例如存储于存储区域502等。
[0076]
当前位置估计处理部53能够执行当前位置估计处理。当前位置估计处理包含根据由位置信息获取装置30获取的位置信息,估计移动装置10的当前位置的处理。在本实施方
式的情况下,当前位置估计处理部53包含使用由地图制成处理部51制成的包含收获作业区域901以及连接区域902的农场90的地图,估计移动装置10的当前位置的处理。即,当前位置估计处理部53能够基于位置信息获取装置30获取的移动装置10的当前位置信息,估计当前移动装置10位于在地图制成处理部51制成的地图上的哪个地点。
[0077]
并且,在本实施方式的情况下,当前位置估计处理部53也包含使用通过移动量获取处理部52获取的移动装置10的移动量,基于从基准位置的移动量,估计移动装置10的当前位置的处理。基准位置例如能够设定为移动装置10的路径上的任意的地点,既可以固定,也可以是通过位置信息获取装置30获取了位置信息的地点。当前位置估计处理部53例如在由地图制成处理部51制成的地图上预先设定移动装置10的移动路径。然后,当前位置估计处理部53将在地图上设定的路径上从基准位置远离由移动量获取处理部52获取的移动量后的地点估计为移动装置10的当前位置。
[0078]
当前位置估计处理部53能够并用基于位置信息获取装置30获取的位置信息估计移动装置10的当前位置的方式、和基于通过移动量获取处理部52获取的移动装置10的移动量估计移动装置10的当前位置的方式。即,例如在构成为在实际的路径上设置标志94、95的情况下,对于未设置标志94、95的区间,位置信息获取装置30不能够获取移动装置10的当前位置。另外,在位置信息获取装置30构成为通过gps获取位置信息的情况下,若有由于农场90的构造物的影响而不能够接收gps电波的位置,则位置信息获取装置30不能够获取移动装置10的当前位置。另一方面,在构成为基于移动装置10的移动量估计移动装置10的当前位置的情况下,当前位置估计处理部53虽然能够连续地估计移动装置10的当前位置,但容易产生与实际的位置的偏移。
[0079]
因此,当前位置估计处理部53例如在设置标志94、95的地点或者能够接收gps电波的地点,通过位置信息获取装置30读取标志94、95或者接收gps电波来估计移动装置10的当前位置。另一方面,在未设置标志94、95的区间或者不能够接收gps电波的区间,当前位置估计处理部53基于通过移动量获取处理部52获取的移动装置10的移动量估计移动装置10的当前位置。由此,能够弥补彼此的方式所不足的信息,其结果,当前位置估计处理部53能够精度良好地估计移动装置10的当前位置。
[0080]
消毒需要与否判定处理部54能够执行消毒需要与否判定处理。消毒需要与否判定处理是判定是否需要对收获工具22的刀部221等消毒对象位置进行消毒的处理。消毒需要与否判定处理包含在通过当前位置估计处理部53,判断为移动装置10即将进入收获作业区域901内的情况下,判定为需要收获工具22的刀部221等消毒对象位置的消毒的处理。在本实施方式的情况下,消毒需要与否判定处理部54在移动装置10将要从收获作业区域901的外侧的区域进入收获作业区域901的情况下,换句话说在移动装置10朝向收获作业区域901移动的情况下,判定为需要对消毒对象位置亦即收获工具22的刀部221等的消毒。具体而言,消毒需要与否判定处理部54例如在移动装置10从跟踪线93朝向收获作业区域901侧移动的情况下,能够判定为需要消毒。详细而言,消毒需要与否判定处理部54例如在检测到设置于跟踪线93的分支点的标志95并向收获作业区域901侧进行分支之后,进一步朝向收获作业区域901侧移动,其后,检测到配置于收获作业区域901的近前的标志94的情况下,能够判定为需要消毒。
[0081]
消毒动作处理部55在通过消毒需要与否判定处理判定为需要消毒的情况下,执行
消毒动作。在本实施方式的情况下,消毒动作处理部55在通过消毒需要与否判定处理判定为需要消毒的情况下,能够立即执行消毒动作。消毒动作是使收获装置20或者消毒装置40的至少一方驱动,对消毒对象位置亦即收获工具22的刀部221进行消毒的动作。在消毒装置40例如构成为将刀部221浸入充满消毒液的消毒槽进行消毒的情况下,或者构成为通过使刀部221接触包含消毒液的布料等来进行消毒的情况下,消毒动作处理部55使收获装置20的机械臂21驱动,来对刀部221进行消毒。
[0082]
另外,在如本实施方式那样,消毒装置40构成为使泵44等驱动向刀部221吹送消毒液的情况下,消毒动作处理部55使收获装置20的机械臂21以及消毒装置40驱动,来对刀部221进行消毒。
[0083]
另外,例如也可以使机械臂21的初始位置为在覆盖部件43内收容刀部221的位置,在收获装置20未进行收获动作的情况下,将刀部221收容在覆盖部件43内。该情况下,消毒动作处理部55不需要为了进行消毒动作,而使机械臂21动作使收获工具22的刀部221移动至覆盖部件43内。即,该情况下,消毒动作处理部55能够不使收获装置20驱动,而通过使消毒装置40驱动,来进行刀部221的消毒。
[0084]
另外,消毒动作处理部55也可以在移动装置10停留于连接区域902的期间进行消毒动作。即,消毒动作处理部55能够构成为在移动装置10停留在收获作业区域901内的期间,换句话说在进行收获作业的期间,不进行消毒动作。
[0085]
另外,收获装置20在通过消毒装置40进行消毒的期间对消毒对象位置进行与收获时相同的动作。在本实施方式的情况下,作为消毒对象位置的收获工具22的刀部221的收获时的动作是指使剪刀形状的刀部221进行开闭的动作。因此,收获装置20在通过消毒装置40进行消毒的期间,换句话说在从喷射部42喷射消毒液的期间,进行使刀部221开闭的动作。由此,消毒液容易遍及包含刀部221的缝隙的整体,能够彻底地进行消毒。
[0086]
另外,收获装置20在通过消毒装置40进行消毒的期间,进行使机械臂21驱动来使收获工具22的姿势变更的动作。由此,消毒液更容易遍及刀部221整体,能够更彻底地对作为消毒对象位置的刀部221的整体进行消毒。
[0087]
[控制流程]
[0088]
接下来,也参照图7~图9,对在农作物收获系统1中执行的消毒动作相关的一系列的控制流程的一个例子进行说明。此外,在以下的说明中,在各步骤执行的处理的主体均为控制装置50。在图6的例子中移动装置10在收获作业区域901内沿着导轨92移动,在连接区域902内沿着跟踪线93进行移动。若移动装置10进入收获作业区域901内,则搭载于移动装置10的收获装置20依次或者有选择地收获在各栽培设备911栽培的收获对象物t。而且,若在移动装置10当前停留的收获作业区域901内的收获作业结束,则移动装置10离开该收获作业区域901,并通过连接区域902移动到下一个收获作业区域901。
[0089]
在该构成中,消毒装置40在移动装置10位于马上进入收获作业区域901的位置,并且停留在连接区域902的期间,进行作为消毒对象位置的收获工具22的刀部221的消毒。该情况下,控制装置50若执行消毒动作相关的一系列的控制流程(图7的开始),则首先在步骤s10中,执行消毒需要与否判定处理。若执行消毒需要与否判定处理,则控制装置50在图8的步骤s101中,执行位置估计处理,估计移动装置10的当前位置。
[0090]
接下来,控制装置50在步骤s102中,判断在步骤s101估计出的移动装置10的当前
位置是否为马上进入收获作业区域901之前。在移动装置10的当前位置为马上进入收获作业区域901之前的情况下(在步骤s102为是),控制装置50使处理移至步骤s103判定为需要消毒,并使处理移至图7的步骤s20(图8的返回)。另一方面,在移动装置10的当前位置不为马上进入收获作业区域901之前的情况下(在步骤s102为否),即在移动装置10的当前位置在收获作业区域901内的情况下,控制装置50使处理移至步骤s104,判定为不需要消毒,并使处理返回到图7的流程(图8的返回)。
[0091]
接下来,控制装置50在图7的步骤s20中,判断步骤s10的消毒需要与否判定处理的结果。在步骤s10的消毒需要与否判定处理中判定为不需要消毒的情况下(在步骤s20为否),控制装置50使处理返回到步骤s10,并反复移至步骤s10的处理。另一方面,在步骤s10的消毒需要与否判定处理中判定为需要消毒的情况下(在步骤s20为是),控制装置50在步骤s30中执行消毒动作处理。
[0092]
控制装置50若执行步骤s30的消毒动作处理,则如图9所示,首先在步骤s301中,基于液量传感器411的检测结果,判断在消毒液罐41内是否残留足够的余量。在消毒液罐41内存积的消毒液的余量不足的情况下(在步骤s301为否),控制装置50使处理移至步骤s302。然后,控制装置50在步骤s302中,例如对上位装置60输出在消毒液罐41内存积的消毒液的余量不足的主旨的错误信号。该情况下,消毒装置40例如从消毒装置40具有的扬声器等发出错误音,对周围的操作者催促消毒液的补充。另外,接收了错误信号的上位装置60从输出部62发出错误音或者进行错误显示等,来对监视者等催促消毒液的补充。然后,控制装置50暂时结束处理(end)。
[0093]
另一方面,在消毒液罐41内存积的消毒液的余量充足的情况下(在步骤s301为是),控制装置50执行步骤s302以后的处理。该情况下,控制装置50在步骤s302中,使收获装置20驱动,使消毒对象位置移动至消毒位置。在本实施方式的情况下,消毒对象位置为收获工具22的刀部221,消毒位置为覆盖部件43的内侧。因此,如图3所示,控制装置50使收获装置20的机械臂21驱动,使收获工具22的至少刀部221从覆盖部件43的开口部431进入覆盖部件43的内侧。
[0094]
另外,控制装置50在步骤s303中,在保持使三通电磁阀45为断开状态的状态下使泵44为打开状态。这样一来,消毒液罐41的消毒液被泵44吸出并通过三通电磁阀45,再次返回到消毒液罐41,在消毒液罐41、泵44、三通电磁阀45之间进行循环。
[0095]
接下来,控制装置50判断从在步骤s303使泵44为打开状态起是否经过了规定的待机时间。规定的待机时间被设定为足以通过使泵44动作,排出连接消毒液罐41与泵44的配管471、以及连接泵44与三通电磁阀45的配管472内的空气并充满消毒液的时间。根据泵44的能力、配管471、472的容积等设定该待机时间,在本实施方式的情况下,例如设定为10秒~1分钟左右。
[0096]
通过从在步骤s303中使泵44为打开状态起经过规定的待机时间,构成喷射路径j的配管471、472、473中连接消毒液罐41与泵44的配管471、以及连接泵44与三通电磁阀45的配管472内充满消毒液,并且配管472内的压力升高。
[0097]
在还未经过待机时间的情况下(在步骤s304为否),控制装置50反复步骤s304进行待机直至经过待机时间。然后,若经过待机时间(在步骤s304为是),控制装置50使处理移至步骤s305,在保持使泵44打开状态的状态下使三通电磁阀45为接通状态。这样一来,消毒液
的流动从返回路径r切换为喷射路径j,从喷射部42喷射消毒液。此外,步骤s303的处理与步骤s304、s305的处理也可以同时进行,也可以顺序相反。
[0098]
接下来,控制装置50在步骤s306中,基于喷射传感器46的检测结果,判断是否从喷射部42喷射消毒液。在通过喷射传感器46未检测到从喷射部42的消毒液的喷射的情况下(在步骤s306为否),控制装置50使处理移至步骤s307。然后,控制装置50使三通电磁阀45为断开状态,并且使泵44为关闭状态,并使消毒液的喷射停止。
[0099]
其后,控制装置50在步骤s308中,例如对上位装置60输出不能够正常地从喷射部42喷射消毒液的主旨的错误信号。该情况下,消毒装置40例如从消毒装置40具有的扬声器等发出错误音,对周围的操作者催促消毒装置40的维护。另外,接收了错误信号的上位装置60从输出部62发出错误音或者进行错误显示等,对监视者等催促消毒装置40的维护。然后,控制装置50暂时结束处理(end)。
[0100]
另一方面,在通过喷射传感器46检测到从喷射部42的消毒液的喷射的情况下(在步骤s306为是),控制装置50使处理移至步骤s309。控制装置50在步骤s309中,在从喷射部42喷射消毒液时,使收获工具22驱动进行与收获时相同的动作。在本实施方式的情况下,控制装置50在步骤s309中,使收获工具22的刀部221进行开闭。由此,消毒液也遍及至刀部221的缝隙,能够彻底地对作为消毒对象位置的刀部221整体进行消毒。
[0101]
其后,控制装置50判断是否对预先设定的姿势模式的全部进行了消毒。该情况下,姿势模式是使收获工具22例如向俯仰方向,侧倾方向,或者横摆方向旋转的姿势。在本实施方式的情况下,控制装置50以两个模式以上的不同的姿势进行消毒动作。在对全部的姿势模式的消毒动作未未完成的情况下(在步骤s310为否),控制装置50使处理移至步骤s311。然后,控制装置50控制机械臂21使收获工具22的姿势变更,之后使处理返回到步骤s306。由此,控制装置50在变更了收获工具22的姿势的状态下再次执行消毒动作。
[0102]
而且,若对设定的全部的姿势模式的消毒动作完成(在步骤s310为是),则控制装置50使处理移至步骤s312。在步骤s312中,控制装置50使三通电磁阀45为断开状态并且使泵44为关闭状态,使消毒液的喷射停止。然后,控制装置50使处理移至图7的步骤s40(图9的返回)。
[0103]
控制装置50在步骤s40中,判断农作物收获系统1中的收获作业是否结束。在收获作业未结束的情况下(在步骤s40为否),控制装置50使处理返回到步骤s10,再次执行步骤s10以后的处理。而且,若收获作业结束(在步骤s40为是),则控制装置50也结束消毒动作相关的一系列的控制(end)。
[0104]
根据以上说明的实施方式,农作物收获系统1具备移动装置10、收获装置20、以及消毒装置40。移动装置10构成为能够在进行收获作业的区域亦即收获作业区域901内移动。收获装置20搭载于移动装置10,具有与成为收获对象物的农作物t接触并对收获对象物t进行收获的功能。消毒装置40具有对收获装置20中至少与收获对象物t接触的位置亦即消毒对象位置221进行消毒的功能。在本实施方式的情况下,消毒装置40具有至少对收获工具22的刀部221进行消毒的功能。
[0105]
而且,农作物收获系统1具备消毒需要与否判定处理部54以及消毒动作处理部55。消毒需要与否判定处理部54能够执行判定对消毒对象位置221的消毒的需要与否,该情况下,判定对收获工具22的刀部221的消毒的需要与否的消毒需要与否判定处理。而且,消毒
动作处理部55在通过消毒需要与否判定处理判定为需要消毒的情况下,能够执行使收获装置20或者消毒装置40的至少一方驱动来对消毒对象位置221进行消毒,该情况下,是对收获工具22的刀部221进行消毒的消毒动作。
[0106]
根据该农作物收获系统1,能够自动地至少对例如收获工具22的刀部221等与收获对象物t直接接触的位置进行消毒。由此,不需要操作者利用手动作业对收获装置20进行消毒,所以与操作者利用手动作业对收获装置20进行消毒的情况相比能够减少消毒作业的麻烦,其结果,能够实现与收获作业相关的作业效率的提高。并且,与操作者利用手动作业对收获装置进行消毒的情况相比,也不易产生操作者忘记消毒等失误。因此,即使在农场90内某一个体产生疾病的情况下,也能够尽量抑制疾病经由收获工具22在农场内扩散。
[0107]
农作物收获系统1还具备位置信息获取装置30、和当前位置估计处理部53。位置信息获取装置30能够获取移动装置10的当前位置信息。当前位置估计处理部53能够执行当前位置估计处理。当前位置估计处理包含根据由位置信息获取装置30获取的位置信息估计移动装置10的当前位置的处理。而且,消毒需要与否判定处理包含在基于当前位置估计处理估计出的移动装置10的当前位置判断为在收获装置20进入收获作业之前的情况下,判定为需要消毒装置40的消毒动作的处理。而且,消毒动作处理部55在收获装置20进行收获作业之前执行消毒动作。
[0108]
据此,消毒动作处理部55在收获装置20进行收获作业之前,对消毒对象位置221,该情况下是收获工具22的刀部221等执行消毒动作,所以能够更有效地抑制疾病经由收获工具22在农场90内扩散。
[0109]
另外,该情况下,消毒需要与否判定处理包含在移动装置10将要进入收获作业区域901的情况下,换句话说在移动装置10朝向收获作业区域901移动的情况下,判定为需要消毒装置40的消毒动作的处理。据此,在移动装置10想要向不同的收获作业区域901移动进行收获作业的情况下,能够可靠地对消毒对象位置,该情况下是收获工具22的刀部221进行消毒。因此,能够更有效地抑制疾病经由收获工具22在农场90内扩散。
[0110]
消毒动作处理部55在通过当前位置估计处理估计出的移动装置10的当前位置位于收获作业区域901之外的期间使消毒装置40执行消毒动作。即,消毒装置40在移动装置10停留在收获作业区域901的外侧的区域的期间,对作为消毒对象位置的收获工具22的刀部221进行消毒动作。换句话说,消毒装置40在移动装置10停留在收获作业区域901内的期间,换句话说在进行收获作业的期间,不进行对消毒对象位置亦即收获工具22的刀部221的消毒动作。因此,能够抑制由于消毒装置40的消毒动作,而阻碍收获装置20的收获作业,其结果,能够抑制伴随消毒动作的收获作业的作业性的降低。
[0111]
另外,位置信息获取装置30包含rfid、二维码、磁性标记、视觉装置、gps的至少任意一种方式来获取移动装置10的当前位置。据此,位置信息获取装置30能够更准确地获取移动装置10的当前位置信息。
[0112]
另外,农作物收获系统1还具备地图制成处理部51。地图制成处理部51能够执行地图制成处理。地图制成处理包含基于操作者的输入,或者基于从搭载于移动装置10的照相机等视觉装置获取的视觉信息,制成收获作业区域901的地图的处理。而且,当前位置估计处理包含使用通过地图制成处理制成的收获作业区域901的地图估计移动装置10的当前位置的处理。据此,当前位置估计处理部53能够更准确地估计移动装置10的当前位置。其结
果,在基于移动装置10的位置控制消毒动作的执行的构成中,能够更精密地控制该消毒动作的执行时机。
[0113]
另外,农作物收获系统1还具备移动量获取处理部52。移动量获取处理部52能够执行获取移动装置10的移动量的移动量获取处理。而且,当前位置估计处理还包含基于从某一基准位置的移动装置10的移动量估计移动装置10的当前位置的处理。即,当前位置估计处理部53除了基于从位置信息获取装置30获取的位置信息估计移动装置10的当前位置之外,还基于移动装置10的移动量估计移动装置10的当前位置。
[0114]
据此,即使在移动装置10位于位置信息获取装置30不能够获取位置信息的区间的情况下,当前位置估计处理部53也能够基于由移动量获取处理部52获取的移动装置10的移动量估计移动装置10的当前位置,所以能够更准确地估计移动装置10的当前位置。其结果,在基于移动装置10的位置控制消毒动作的执行的构成中,能够更精密地控制该消毒动作的执行时机。
[0115]
另外,消毒装置40具有喷射消毒液的喷射部42,通过从喷射部42对作为消毒对象位置的收获工具22的刀部221喷射消毒液来进行消毒。据此,由于将液体的消毒液吹送至刀部221进行消毒,所以能够对刀部221整体进行高效的消毒。
[0116]
另外,消毒装置40还具有能够检测消毒液的喷射的光学式的喷射传感器46。据此,与消毒液的喷射的检测例如采用了压力传感器、流量传感器、雨滴传感器或者结露传感器的情况相比,不容易被湿度等外部环境影响,能够准确并且在短时间大致实时地检测消毒液的喷射状况。而且,通过准确并且在短时间大致实时地检测消毒液的喷射状况,农作物收获系统1能够精密地控制消毒液的喷射,其结果,能够抑制消毒液的使用量。
[0117]
另外,消毒装置40还具有覆盖部件43。覆盖部件43具有能够插入消毒对象位置亦即收获工具22的刀部221的开口部431。而且,覆盖部件43至少覆盖与从喷射部42喷射的消毒液的喷射方向对置的面。
[0118]
据此,从喷射部42喷射的消毒液中未碰到消毒对象位置亦即收获工具22的大部分碰到设置于与喷射部42对置的位置的覆盖部件43。因此,能够抑制从喷射部42喷射的消毒液向周围飞散。并且,在本实施方式的情况下,覆盖部件43除了开口部431之外包围喷射部42的周围,所以能够抑制从喷射部42喷射的消毒液被风吹走。其结果,能够使从喷射部42喷射的消毒液碰到消毒对象位置亦即收获工具22的刀部221。
[0119]
另外,消毒装置40具有消毒液罐41、泵44、以及三通电磁阀45。消毒液罐41用于存积消毒液。泵44具有吸出消毒液罐41内的消毒液并喷射的功能。三通电磁阀45具有择一地切换连接泵44与喷射部42并将从泵44排出的消毒液供给至喷射部42的喷射路径j、和连接泵44与消毒液罐41并使从泵44排出的消毒液返回到消毒液罐41的返回路径r的功能。
[0120]
而且,消毒装置40在执行消毒动作时,首先,在将三通电磁阀45切换为返回路径r的状态下使泵44动作,使消毒液在泵44与消毒液罐41之间循环规定期间。其后,消毒装置40将三通电磁阀45切换为喷射路径j使消毒液从喷射部42喷射。
[0121]
据此,在将三通电磁阀45切换为喷射路径j之前,能够推出构成喷射路径j的配管471、472、473中至少从消毒液罐41到三通电磁阀45的配管471、472内的空气并充满消毒液,并且提高配管472内的压力。其结果,若使三通电磁阀45为接通状态打开喷射路径j,则能够几乎无延迟地从喷射部42喷射消毒液。由此,能够精密地控制消毒液的喷射,能够缩短喷射
时间尽量抑制消毒液的消耗量。
[0122]
另外,消毒装置40构成为搭载于移动装置10并能够与移动装置10一起移动。据此,与将消毒装置40固定地设置于农场90内的特定位置的情况相比,移动装置10不需要移动至该消毒装置40的设置位置。另外,消毒装置40能够在与移动装置10一起移动的同时进行消毒动作。即,根据该构成,能够削减为了消毒动作而移动装置10移动至消毒装置40的设置位置或者为了消毒动作而停止的时间。其结果,能够尽量不使包含收获装置20的移动装置10的运转率降低而进行消毒动作。
[0123]
收获装置20在通过消毒装置40进行上述消毒动作期间,对消毒对象位置执行收获时的动作,在本实施方式的情况下,执行使收获工具22的刀部221进行开闭的动作。据此,消毒液容易遍及包含刀部221的缝隙的整体,所以能够彻底地对消毒对象位置亦即刀部221的整体进行消毒。
[0124]
收获装置20具备多关节的机械臂21、和搭载于机械臂21的指尖部并与收获对象物t接触对收获对象物t进行收获的收获工具22。而且,在通过消毒装置40进行消毒动作的期间进行使机械臂21驱动使收获工具22的姿势变更的动作。
[0125]
据此,消毒液更容易遍及刀部221整体,能够更彻底地对消毒对象位置亦即刀部221的整体进行消毒。
[0126]
(第二实施方式)
[0127]
接下来,参照图10对第二实施方式进行说明。
[0128]
在本实施方式中,消毒需要与否判定处理的具体方式与上述第一实施方式不同。即,在本实施方式中,消毒需要与否判定处理包含在移动装置10离开了收获作业区域901的情况下判定为需要消毒装置40的消毒动作的处理。该情况下,控制装置50代替图8的步骤s102,而执行图10的步骤s105。
[0129]
控制装置50在步骤s105中,基于在步骤s101估计出的移动装置10的当前位置,判断移动装置10是否离开收获作业区域901。在移动装置10离开收获作业区域901的情况下(在步骤s105为是),控制装置50使处理移至步骤s103,判定为需要消毒动作。另一方面,在移动装置10未离开收获作业区域901的情况下(在步骤s105为否),控制装置50使处理移至步骤s104,判定为不需要消毒动作。
[0130]
由此,也能够得到与上述第一实施方式相同的作用效果。
[0131]
(第三实施方式)
[0132]
接下来,参照图11对第三实施方式进行说明。
[0133]
本实施方式的消毒需要与否判定处理的具体方式也与上述各实施方式不同。即,在本实施方式中,消毒需要与否判定处理包含基于通过收获装置20收获的收获对象物t的数目,判定消毒装置40的消毒动作的需要与否的处理。该情况下,控制装置50能够使移动装置10的当前位置不包含于消毒动作的需要与否的判定要素。该情况下,控制装置50不执行图8的步骤s101,而且,代替图8的步骤s102而执行图11的步骤s106。
[0134]
控制装置50在步骤s106中,判断从进行上一次消毒动作起收获的收获对象物t的个数。在从进行上一次消毒动作起收获的收获对象物t的个数在预先设定的规定量以上的情况下(在步骤s106为是),控制装置50使处理移至步骤s103,判定为需要消毒动作。另一方面,在从进行上一次消毒动作起收获的收获对象物t的个数小于预先设定的规定量的情况
下(在步骤s106为否),控制装置50使处理移至步骤s104,判定为不需要消毒动作。
[0135]
由此,也能够得到与上述各实施方式相同的作用效果。
[0136]
(第四实施方式)
[0137]
接下来,参照图12对第四实施方式进行说明。
[0138]
本实施方式的消毒需要与否判定处理的具体方式也与上述各实施方式不同。即,在本实施方式中,消毒需要与否判定处理包含在移动装置10移动至培育不同的品种的收获对象物t的区域的情况下,判定为需要消毒装置40的消毒动作的处理。该情况下,控制装置50代替图8的步骤s102而执行图12的步骤s107。
[0139]
控制装置50在步骤s107中,基于在步骤s101估计出的移动装置10的当前位置,判断移动装置10是否想要移动至培育不同的品种的收获对象物的收获作业区域901。控制装置50在判断为移动装置10想要移动至培育不同的品种的收获对象物的收获作业区域的情况下(在步骤s107为是),使处理移至步骤s103,判定为需要消毒动作。
[0140]
另一方面,在移动装置10的移动并不是向培育不同的品种的收获对象物t的收获作业区域901的移动的情况下(在步骤s107为否),即在移动装置10的移动是在培育同一品种的收获对象物的收获作业区域901中进行的移动的情况下,控制装置50使处理移至步骤s104,判定为不需要消毒动作。
[0141]
由此,也能够得到与上述各实施方式相同的作用效果。
[0142]
(第五实施方式)
[0143]
接下来,参照图13对第五实施方式进行说明。
[0144]
本实施方式的消毒需要与否判定处理的具体方式也与上述各实施方式不同。即,在本实施方式中,消毒需要与否判定处理包含基于从通过消毒装置40进行上一次消毒动作起的经过时间,判定消毒装置40的消毒动作的需要与否的处理。该情况下,控制装置50能够使移动装置10的当前位置不包含于消毒动作的需要与否的判定要素。该情况下,控制装置50不执行图8的步骤s101,而且,代替图8的步骤s102而执行图13的步骤s108。
[0145]
控制装置50在步骤s108中,判断从进行上一次消毒动作起的经过时间。在从进行上一次消毒动作起经过了规定时间的情况下(在步骤s108为是),控制装置50使处理移至步骤s103,判定为需要消毒动作。另一方面,在从进行上一次消毒动作起还未经过规定时间的情况下(在步骤s108为否),控制装置50使处理移至步骤s104,判定为不需要消毒动作。
[0146]
由此,也能够得到与上述各实施方式相同的作用效果。
[0147]
(第六实施方式)
[0148]
接下来,参照图14对第六实施方式进行说明。
[0149]
在本实施方式中,消毒需要与否判定处理的具体方式与上述各实施方式不同。即,在本实施方式中,消毒需要与否判定处理包含基于从通过消毒装置40进行上一次消毒动作起的移动装置10的移动量,判定为需要消毒装置40的消毒动作的处理。该情况下,控制装置50代替图8的步骤s102,执行图14的步骤s109。
[0150]
控制装置50在步骤s109中,基于在步骤s101估计出的移动装置10的当前位置,判断从进行上一次消毒动作的地点起的移动装置10的移动量是否达到规定距离。在从进行上一次消毒动作的地点起的移动装置10的移动量达到规定距离的情况下(在步骤s109为是),控制装置50使处理移至步骤s103,判定为需要消毒动作。另一方面,在从进行上一次消毒动
作的地点起的移动装置10的移动量未达到规定距离的情况下(在步骤s109为否),控制装置50使处理移至步骤s104,判定为不需要消毒动作。
[0151]
由此,也能够得到与上述第一实施方式相同的作用效果。
[0152]
(第七实施方式)
[0153]
接下来,参照图15以及图16对第七实施方式进行说明。
[0154]
本实施方式能够与上述各实施方式组合。在本实施方式中,如图15所示,消毒装置40设置于农场90内的特定的位置。在移动装置10的移动路径的中途,例如在连接区域902内设置有多台消毒装置40。
[0155]
如图16所示,控制装置50若在步骤s20中判定为需要消毒动作,则执行步骤s60的处理,使移动装置10移动至设置在农场90内的消毒装置40。然后,与上述各实施方式相同,执行步骤s30、s40。
[0156]
由此,也能够得到与上述第一实施方式相同的作用效果。
[0157]
另外,据此,能够由多台收获装置20共享消毒装置40。因此,例如在农场90内同时使用的移动装置10的台数较多的情况下,也可以不分别在各移动装置10搭载消毒装置40,所以能够削减消毒装置40的台数。
[0158]
(其它的实施方式)
[0159]
此外,本公开并不限定于上述并且记载于附图的各实施方式,能够在不脱离其主旨的范围内任意地进行变形,组合,或者扩展。
[0160]
上述各实施方式所示的数值等为例示,并不限定于此。
[0161]
例如上述各实施方式构成为在收获装置20进行收获作业之前或者之后进行消毒动作,但并不限定于此,例如也可以在收获装置20进行收获作业时进行消毒动作。
[0162]
本公开依据实施例进行了记述,但应该理解为本公开并不限定于该实施例、构造。本公开也包含各种变形例、同等范围内的变形。除此之外,也将各种组合、方式,甚至其中仅包含一个要素、更多或者更少要素的其它的组合、方式纳入本公开的范畴、思想范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1