一种基于功能性状筛选模型的入侵植物生物防治系统
1.本发明涉及外来入侵物种防控领域,尤其涉及一种基于功能性状筛选模型的入侵植物生物防治系统。
背景技术:
2.外来入侵植物侵入到一个新的生境后,在适宜的气候、土壤、水分及传播条件下大肆扩散蔓延,竞争、排斥并最终取代当地生物群落,形成大面积单一优势群落;破坏本地动植物相,导致当地生物多样性丧失。
3.如cn102860206b现有技术公开了一种恶性杂草刺萼龙葵入侵天然植被快速恢复方法,自然分布区通过有意或无意的人类活动而被引入,在当地生态系统中形成了自我再生能力、给当地的生态系统或农业生产造成明显的损害或影响的物种。由于其对人类健康、自然生态系统生态功能、生物多样性和农牧业效益等造成巨大威胁,外来入侵生物己成为全球性生物安全、环境和经济的热点问题,引起世界各国高度重视。因为植物群落的破坏会导致整个自然生态系统基础的瓦解,入侵植物现已成为经济问题并威胁着自然生态系统。
4.经过大量检索发现存在的现有技术如kr101951364b1、ep2427556b1和us08694396b1,外类物种的入侵极大影响本地土生动物,严重威胁当地农业生产和生物多样性,消耗了大量人力物力且使农药的施用量大大增加,致使农药的环境污染加重等。但由于稻田土对农药的吸附率极高,克氏原螯虾在挖掘的洞穴中或深层底泥中可以躲避毒杀,致使单纯使用农药无法将稻田中克氏原螯虾自然种群进行有效防治和根除。
5.为了解决本领域普遍存在防治效果不佳、防治能力差、预警能力不足和本地生物建立基础差等等问题,作出了本发明。
技术实现要素:
6.本发明的目的在于,针对目前入侵物种防控所存在的不足,提出了一种基于功能性状筛选模型的入侵植物生物防治系统。
7.为了克服现有技术的不足,本发明采用如下技术方案:
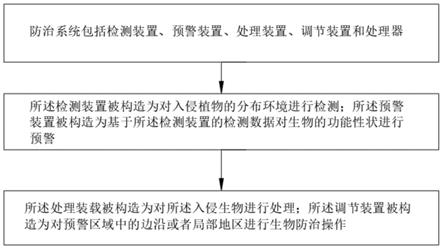
8.一种基于功能性状筛选模型的入侵植物生物防治系统,防治系统包括检测装置、预警装置、处理装置、调节装置和处理器,所述检测装置被构造为对入侵植物的分布环境进行检测;所述预警装置被构造为基于所述检测装置的检测数据对生物的功能性状进行预警;所述处理装载被构造为对所述入侵生物进行处理;所述调节装置被构造为对预警区域中的边沿或者局部地区进行生物防治操作。
9.可选的,所述检测装置被构造为识别目标区域,其中该目标区域包括有害植物种类;所述检测装置被构造为选择处理时间,其中目标区域中的有害植物种类相互作用;所述检测装置还被构造为对目标区域的第一部署位置提供采集检测单元,所述采集检测单元被构造为对所述目标区域中的植物数据进行采集,并采集所述植物的生存环境。
10.可选的,所述预警装置包括预警检测机构和采集机构,所述预警检测机构被构造
为设置入侵植物的分布环境中,并对该环境中的分布范围进行检测;所述采集机构被构造为采集所述预警检测机构的数据,并基于所述预警检测机构的采集数据,确定入侵分布区域密度及范围。
11.可选的,所述处理装置包括在环境条件下用包含有效量的多核苷酸的组合物处理入侵植物物种的种群,所述多核苷酸已经用性状表达为沉默载体修饰,并且其中所述组合物与生活在相同环境中的非入侵植物物种相比,对入侵植物物种产生了不利影响。
12.可选的,所述调节装置被构造为对所述植物施加防治药物,所述防治药被构造为对所述入侵植物物种中与生长、种子产生、营养繁殖、光合作用、花器官发育、花粉产生或其组合有关的性状表达为沉默。
13.可选的,所述防治药物包括性状表达为沉默载体,其抑制或减少涉及植物的生长、种子产生、营养繁殖、光合作用、花器官发育、花粉产生或其组合的性状的表达。
14.可选的,所述调节装置还包括施药设备,所述施药设备被构造对所述植物的区域内对进行喷洒;施药设备可以通过喷雾、撒粉、喷漆、粒子轰击以及通过任何其他方式施加到植物上。
15.可选的,所述检测装置包括识别相机和统计机构,所述识别相机设置在所述统计机构上;所述统计机构被构造为对目标区域中的种类进行采集;所述统计机构包括无人机和数据传输构件,所述数据传输构件被构造为对所述无人机构进行支撑,并通过设置在所述无人机上的所述识别相机对所述目标区域中的有害植物或者入侵植物进行分布图的采集。
16.可选的,所述检测装置还包括数据统计件,所述数据传输统计件被构造为对所述无人机的数据进行采集,并与外部的其他装置进行数据的传输;所述数据传输构件包括识别板、支撑平台、支撑座、抬升单元和限制区域,所述识别板被构造为设置在所述支撑平台的顶部,用于与所述无人机的采集的数据进行传输或者落地;所述抬升单元被构造为与所述支撑平台进行连接,用于对所述支撑平台的高度进行调整。
17.可选的,所述防治系统还包括支撑装置,所述支撑装置被构造为对所述处理装置进行支撑,并嵌套或者固定在所述入侵植物的外周。
18.本发明所取得的有益效果是:
19.1.通过采用检测装置对入侵的范围进行精准的定位,使得植物的入侵能够得到精准、高效饿控制;
20.2.通过采用对入侵植物的处理或者调节,使得能够兼顾植物的防护和保护;最大消毒的保护本土物种的生存;
21.3.通过采用统计机构和限制机构之间的配合使用,使得对无人机连同识别相机能够对目标区域中的入侵植物进行精准的识别,进一步的提升对入侵生物的识别精度;
22.4.通过采用通过预警装置基于检测装置的检测数据,尤其是统计机构的数据进行采集,并由预警装置对目标区域进行预警;
23.5.通过采用牵拉件对入侵植物的茎秆的周径进行检测,使得入侵植物在进行成长的过程中,就会对入侵植物的习性进行检测,用于丰富数据的采集,并基于采集的数据提供预警的信号;
24.6.通过采用通过施药设备贯通到防护罩中,并对防护罩中的入侵植物进行消杀,
保证植物能够被精准的消灭掉,同时,施药设备通过连接管道与防护罩进行连通,并对嵌套在防护罩中的入侵植物进行药液喷淋。
附图说明
25.从以下结合附图的描述可以进一步理解本发明。图中的部件不一定按比例绘制,而是将重点放在示出实施例的原理上。在不同的视图中,相同的附图标记指定对应的部分。
26.图1为本发明的控制流程示意图。
27.图2为喷射防止药物后的叶片的状态示意图。
28.图3为入侵植物的根系施药后的应用效果图。
29.图4为所述限制座的结构示意图。
30.图5为所述防护罩与所述限制座的结构示意图。
31.图6为所述无人机与所述数据传输构件的结构示意图。
32.图7为所述采集机构与所述预警检测机构的示意图。
33.图8为所述预警检测机构的示意图。
34.图9为所述限制机构与所述转向单元的示意图。
35.图10为所述限制机构与所述目标区域的示意图。
36.附图标号说明:1
‑
限制座;2
‑
限制槽;3
‑
空腔;4
‑
充气部件;5
‑
防护罩;6
‑
入侵植物;7
‑
识别板;8
‑
识别相机;9
‑
无人机;10
‑
抬升单元;11
‑
支撑平台;12
‑
支撑座;13
‑
预警检测机构;14
‑
采集机构;15
‑
数据传输件;16
‑
调整构件;17
‑
转动测量件;18
‑
牵拉件;19
‑
连接管道;20
‑
限制机构;21
‑
目标区域;22
‑
限制机构。
具体实施方式
37.为了使得本发明的目的.技术方案及优点更加清楚明白,以下结合其实施例,对本发明进行进一步详细说明;应当理解,此处所描述的具体实施例仅用于解释本发明,并不用于限定本发明。对于本领域技术人员而言,在查阅以下详细描述之后,本实施例的其它系统.方法和/或特征将变得显而易见。旨在所有此类附加的系统.方法.特征和优点都包括在本说明书内.包括在本发明的范围内,并且受所附权利要求书的保护。在以下详细描述描述了所公开的实施例的另外的特征,并且这些特征根据以下将详细描述将是显而易见的。
38.本发明实施例的附图中相同或相似的标号对应相同或相似的部件;在本发明的描述中,需要理解的是,若有术语“上”.“下”.“左”.“右”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或组件必须具有特定的方位.以特定的方位构造和操作,因此附图中描述位置关系的用语仅用于示例性说明,不能理解为对本专利的限制,对于本领域的普通技术人员而言,可以根据具体情况理解上述术语的具体含义。
39.实施例一:一种基于功能性状筛选模型的入侵植物生物防治系统,其特征在于,防治系统包括检测装置、预警装置、处理装置、调节装置和处理器,所述检测装置被构造为对入侵植物的分布环境进行检测;所述预警装置被构造为基于所述检测装置的检测数据对生物的功能性状进行预警;所述处理装载被构造为对所述入侵生物进行处理;所述调节装置被构造为对预警区域中的边沿或者局部地区进行生物防治操作;
40.进一步的,所述检测装置被构造为识别目标区域,其中该目标区域包括有害植物种类;所述检测装置被构造为选择处理时间,其中目标区域中的有害植物种类相互作用;所述检测装置还被构造为对目标区域的第一部署位置提供采集检测单元,所述采集检测单元被构造为对所述目标区域中的植物数据进行采集,并采集所述植物的生存环境;
41.进一步的,所述预警装置包括预警检测机构和采集机构,所述预警检测机构被构造为设置入侵植物的分布环境中,并对该环境中的分布范围进行检测;所述采集机构被构造为采集所述预警检测机构的数据,并基于所述预警检测机构的采集数据,确定入侵分布区域密度及范围;
42.进一步的,所述处理装置包括在环境条件下用包含有效量的多核苷酸的组合物处理入侵植物物种的种群,所述多核苷酸已经用性状表达为沉默载体修饰,并且其中所述组合物与生活在相同环境中的非入侵植物物种相比,对入侵植物物种产生了不利影响;
43.进一步的,所述调节装置被构造为对所述植物施加防治药物,所述防治药被构造为对所述入侵植物物种中与生长、种子产生、营养繁殖、光合作用、花器官发育、花粉产生或其组合有关的性状表达为沉默;
44.进一步的,所述防治药物包括性状表达为沉默载体,其抑制或减少涉及植物的生长、种子产生、营养繁殖、光合作用、花器官发育、花粉产生或其组合的性状的表达;
45.进一步的,所述调节装置还包括施药设备,所述施药设备被构造对所述植物的区域内对进行喷洒;施药设备可以通过喷雾、撒粉、喷漆、粒子轰击以及通过任何其他方式施加到植物上;
46.可选的,所述检测装置包括识别相机和统计机构,所述识别相机设置在所述统计机构上;所述统计机构被构造为对目标区域中的种类进行采集;所述统计机构包括无人机和数据传输构件,所述数据传输构件被构造为对所述无人机构进行支撑,并通过设置在所述无人机上的所述识别相机对所述目标区域中的有害植物或者入侵植物进行分布图的采集;
47.可选的,所述检测装置还包括数据统计件,所述数据传输统计件被构造为对所述无人机的数据进行采集,并与外部的其他装置进行数据的传输;所述数据传输构件包括识别板、支撑平台、支撑座、抬升单元和限制区域,所述识别板被构造为设置在所述支撑平台的顶部,用于与所述无人机的采集的数据进行传输或者落地;所述抬升单元被构造为与所述支撑平台进行连接,用于对所述支撑平台的高度进行调整;
48.可选的,所述防治系统还包括支撑装置,所述支撑装置被构造为对所述处理装置进行支撑,并嵌套或者固定在所述入侵植物的外周。
49.实施例二:本实施例应当理解为至少包含前述任一一个实施例的全部特征,并在其基础上进一步改进;提供一种基于功能性状筛选模型的入侵植物生物防治系统,其特征在于,防治系统包括检测装置、预警装置、处理装置、调节装置和处理器,所述检测装置被构造为对入侵植物的分布环境进行检测;所述预警装置被构造为基于所述检测装置的检测数据对生物的功能性状进行预警;所述处理装载被构造为对所述入侵生物进行处理;所述调节装置被构造为对预警区域中的边沿或者局部地区进行生物防治操作;所述检测装置被构造为识别目标区域,其中该目标区域包括有害植物种类;所述检测装置被构造为选择处理时间,其中目标区域中的有害植物种类相互作用;所述检测装置还被构造为对目标区域的
第一部署位置提供采集检测单元,所述采集检测单元被构造为对所述目标区域中的植物数据进行采集,并采集所述植物的生存环境;所述预警装置包括预警检测机构和采集机构,所述预警检测机构被构造为设置入侵植物的分布环境中,并对该环境中的分布范围进行检测;所述采集机构被构造为采集所述预警检测机构的数据,并基于所述预警检测机构的采集数据,确定入侵分布区域密度及范围;所述处理器分别与所述检测装置、所述预警装置、所述处理装置、所述调节装置控制连接,并基于所述处理器的控制操作对各个装置进行集中的调控,保证对外来生物能够精准的识别、防控或者防治;所述检测装置与所述预警装置相互配合使用,使得所述检测装置检测到的数据均能被精准的识别,并基于所述检测装置的检测数据触发预警信号;所述预警装置和所述处理装置相互配合,并对入侵生物进行处理;在本实施例中,所述入侵生物特指入侵植物;所述调节装置与所述预警装置相互配合,并对所述入侵植物的繁殖或者入侵的速度进行检测,并触发对所述入侵植物的处理操作;所述防治系统还包括支撑装置,所述支撑装置被构造为对所述处理装置进行支撑,并嵌套或者固定在所述入侵植物的外周,使得通过对所述入侵生物进行处理,提升整个防治的效果;所述支撑装置包括限制座、防护罩和充气部件,所述防护罩被构造为与所述限制座可拆卸连接,且所述防护罩设置为充气式并与所述充气部件连接;所述限制座被构造为设有限制槽,所述限制槽被构造为沿着所述限制座的长度方向沿着,且所述限制槽被构造为与所述限制座同轴设置;所述限制座设有空腔,所述空腔被构造为与所述入侵植物进行密封或者嵌套;
50.所述检测装置被构造为识别目标区域,其中该目标区域包括有害植物种类;所述检测装置被构造为选择处理时间,其中目标区域中的有害植物种类相互作用;所述检测装置还被构造为对目标区域的第一部署位置提供采集检测单元,所述采集检测单元被构造为对所述目标区域中的植物数据进行采集,并采集所述植物的生存环境;所述检测装置与所述预警装置相互配配合使用,使得所述预警装置基于所述检测装置的检测过程中,能够基于所述检测装置的检测数据触发对所述入侵植物的预警信号的触发;另外,所述检测装置包括识别相机和统计机构,所述识别相机设置在所述统计机构上;所述统计机构被构造为对目标区域中的种类进行采集;所述统计机构包括无人机和数据传输构件,所述数据传输构件被构造为对所述无人机构进行支撑,并通过设置在所述无人机上的所述识别相机对所述目标区域中的有害植物或者入侵植物进行分布图的采集;在本实施例中,首先通过,应用所述统计机构对外来物种进行数据捕捉,并对该目标区域中的物种的分布进行数据的调理;从而获得外来物种的分布的位置数据;其次,利用外来物种的分布的位置数据,进行外来物种的实地调查与信息验证,获得外来物种的实际位置数据;同时,通过所述预警装置基于所述检测装置的检测数据,尤其是所述统计机构的数据进行采集,并由所述预警装置对所述目标区域进行预警;所述检测装置还包括数据统计件,所述数据传输统计件被构造为对所述无人机的数据进行采集,并与外部的其他装置进行数据的传输;所述数据传输构件包括识别板、支撑平台、支撑座、抬升单元和限制区域,所述识别板被构造为设置在所述支撑平台的顶部,用于与所述无人机的采集的数据进行传输或者落地;所述抬升单元被构造为与所述支撑平台进行连接,用于对所述支撑平台的高度进行调整;所述抬升单元包括抬升杆和抬升驱动机构,所述抬升杆的一端与所所述支撑平台进行垂直固定连接,且所述抬升杆的一端与所述支撑平台的下底部进行垂直固定连接,所述抬升杆的另一端与支撑座进
行连接;所述抬升驱动机构被构造为对所述抬升杆驱动连接;同时,所述统计机构还包括数据传输件,所述数据传输件被构造为设置在所述无人机的底部,并用于与所述识别板进行数据的传输;且当所述无人机停靠在所述支撑平台上时,对通过所述数据传输件与所述识别板进行数据的传输;另外,所述检测装置还包括限制机构,所述限制机构被构造为对所述统计机构的统计范围进行限定,用于对在所述识别目标中的各个入侵物种进行精准的统计;所述限制机构包括若干个限制构件和若干个定位标记件,各个所述定位标记件被构造为对应设置在各个所述限制构件上,并实时的对向着所述统计构件或者所述处理器实时的反馈定位信息;所述统计机构和所述限制机构之间的配合使用,使得对所述无人机连同所述识别相机能够对所述目标区域中的入侵植物进行精准的识别,进一步的提升对所述入侵生物的识别精度;
51.所述预警装置包括预警检测机构和采集机构,所述预警检测机构被构造为设置入侵植物的分布环境中,并对该环境中的分布范围进行检测;所述采集机构被构造为采集所述预警检测机构的数据,并基于所述预警检测机构的采集数据,确定入侵分布区域密度及范围;所述预警检测机构和所述采集机构之间相互配合,使得各个所述入侵植物的密度和生长状态能够被精准的检测出来;所述采集机构被构造为对各个设置在识别区域中的植物的生长状态的数据进行集中或者采集;同时,所述预警检测机构还兼顾对所述入侵植物的状态进行识别、湿度或者环境进行识别;同时,所述预警检测机构被构造为与所述植物的茎秆部位进行嵌套并对所述入侵植物的生长状态进行识别;同时,所述预警检测机构与所述采集机构进行配对并建立数据传输网络,通过数据传输网络对各个所述入侵植物的数据进行集中的采集;所述预警检测机构包括一组固定环、牵拉件、调整构件和数据传输件,所述数据传输件被构造为对所述调整构件的调整数据进行采集,并通过无线传输或者有线的方式与所述采集机构进行传输;一组所述固定环相互铰接形成圆环状,且一组所述固定环还通过固定件进行卡接,使得所述预警检测机构能够固定在所述入侵植物的茎秆或者根部;所述固定环的内壁设有供所述牵拉件和所述调整构件放置的空腔,所述牵拉件的一端与所述调整构件固定连接,所述牵拉件的另一端与环绕所述入侵植物的杆径并与所述调整构件进行滑动连接;所述调整构件被构造为基于所述入侵植物的杆径的变大对所述牵拉件进行牵拉,触发对所述调整件的检测;所述调整构件包括拉力检测件、转动调整机构和转动测量件,所述拉力检测件被构造为对所述牵拉件的拉力进行检测,当所述牵拉件的拉力超过设定的阀值就会触发所述转动调整机构的转动,进而实现对所述牵拉件的松开;所述转动测量件被构造为对所述转动调整机构转动的过程中对所述牵拉件的松开程度的测量;所述转动调整机构被构造为对所述牵拉件进行啮合并对所述牵拉件的松开的程度进行调整并实时的检测;所述牵拉件被构造为对所述入侵植物的茎秆的周径进行检测,使得所述入侵植物在进行成长的过程中,就会对所述入侵植物的习性进行检测,用于丰富数据的采集,并基于采集的数据提供预警的信号;通过所述预警装置与所述处理装置的配合使用,使得对所述入侵生物能够进行高效的数据采样,了解所述入侵生物的习性,同时,通过所述入侵生物能够进行高效的处理达到消灭入侵植物的目的;
52.所述处理装置包括在环境条件下用包含有效量的多核苷酸的组合物处理入侵植物物种的种群,所述多核苷酸已经用性状表达为沉默载体修饰,并且其中所述组合物与生活在相同环境中的非入侵植物物种相比,对入侵植物物种产生了不利影响;所述调节装置
被构造为对所述植物施加防治药物,所述防治药被构造为对所述入侵植物物种中与生长、种子产生、营养繁殖、光合作用、花器官发育、花粉产生或其组合有关的性状表达为沉默;所述防治药物包括性状表达为沉默载体,其抑制或减少涉及植物的生长、种子产生、营养繁殖、光合作用、花器官发育、花粉产生或其组合的性状的表达;所述调节装置还包括施药设备,所述施药设备被构造对所述植物的区域内对进行喷洒;施药设备可以通过喷雾、撒粉、喷漆、粒子轰击以及通过任何其他方式施加到植物上;减少种子的产生或者多个光合作用性状已被沉默,以证明其具有性状表达为沉默作用,因此是显而易见的靶标;这些包括但不限于,番茄红素去饱和酶、镁螯合酶;此外,可通过调节植物激素或降低由诸如脆性库尔姆等性状控制的木质素或纤维素的产量来使植物生长中的性状表达为沉默来降低植物的生长;用于减少或抑制根生长的靶向性状包括与根组织有关的性状;以及与生长素转运蛋白有关的性状;所述防治药物包括性状表达为沉默载体,其抑制或减少涉及植物的生长、种子产生、营养繁殖、光合作用、花器官发育、花粉产生或其组合的性状的表达;另外,所述处理装置还包括喷洒机构,所述喷洒机构被构造为对上述的液体存储并喷洒在所述入侵植物上,使得所述入侵植物不能进行授粉或者传播;所述处理装置还与所述支撑装置进行配合使用,并通过所述施药设备贯通到所述防护罩中,并对所述防护罩中的入侵植物进行消杀,保证所述植物能够被精准的消灭掉;所述施药设备通过连接管道与所述防护罩进行连通,并对嵌套在所述防护罩中的入侵植物进行药液喷淋;
53.所述调节装置被构造为对所述植物施加防治药物,所述防治药物被构造为对所述入侵植物物种中与生长、种子产生、营养繁殖、光合作用、花器官发育、花粉产生或其组合有关的性状表达为沉默;所述调节装置还包括施药设备,所述施药设备被构造对所述植物的区域内对进行喷洒;施药设备可以通过喷雾、撒粉、喷漆、粒子轰击以及通过任何其他方式施加到植物上;所述调节装置与所述处理装置相互配合,并对所述入侵植物进行消杀,提升对所述外来植物的防治的准确和高效性;具体的,用有效量的包含多核苷酸的组合物在环境条件下处理入侵植物物种的种群,其中所述多核苷酸已被载体修饰沉默靶性状,并且其中多核苷酸抑制所述入侵植物物种中所述靶性状的表达,其中所述靶性状的表达对于生长,种子产生,营养繁殖,光合作用,花器官发育,花粉产生或所述入侵植物物种的组合,其中所述组合物在相同环境下不影响非入侵植物物种;另外,在本实施例中,所述防治药物是本领域的技术人员所熟知的技术手段,本领域的技术人员可以查询相关的技术手册获悉该技术手段,选用合适于该种入侵植物的药物,因而在本实施例中不再一一的赘述;另外,在自然环境中减少入侵植物物种的消除并不会产生死区,而在其他方法中,入侵植物物种失去了竞争优势,而是被重新引入的本地植物逐渐取代种类;提供了用于控制入侵植物物种的种群的组合物,其包含有效量的多核苷酸,所述多核苷酸已经用性状表达为沉默载体修饰,以及农业上或园艺上可接受的载体;缺乏敌人(捕食者和病原体),过分地控制有限资源的生物量快速增长,高繁殖力(允许高种子生产和新个体的繁殖),广泛的无性繁殖(既控制物理空间又控制自然)允许在很少有人的情况下向新区域定居,并产生使原生物种环境恶化的次级影响;通过下述的方式对入侵植物进行调理:1)仅设计为影响目标物种;2)它不会产生死区;3)不使用除草剂或脱靶化学品(因此对非靶物种没有影响;而且,在本实施例使用方法中,它不会引起喷雾飘移并且不会影响相邻区域的动植物);4)它包含一个管理协议,该协议包括引入本地植物以继承该入侵植物,从而不会产生死区。
54.实施例三:本实施例应当理解为至少包含前述任一一个实施例的全部特征,并在其基础上进一步改进;提供一种基于功能性状筛选模型的入侵植物生物防治系统,其特征在于,防治系统包括检测装置、预警装置、处理装置、调节装置和处理器,所述检测装置被构造为对入侵植物的分布环境进行检测;所述预警装置被构造为基于所述检测装置的检测数据对生物的功能性状进行预警;所述处理装载被构造为对所述入侵生物进行处理;所述调节装置被构造为对预警区域中的边沿或者局部地区进行生物防治操作;所述检测装置被构造为识别目标区域,其中该目标区域包括有害植物种类;所述检测装置被构造为选择处理时间,其中目标区域中的有害植物种类相互作用;所述检测装置还被构造为对目标区域的第一部署位置提供采集检测单元,所述采集检测单元被构造为对所述目标区域中的植物数据进行采集,并采集所述植物的生存环境;所述预警装置包括预警检测机构和采集机构,所述预警检测机构被构造为设置入侵植物的分布环境中,并对该环境中的分布范围进行检测;所述采集机构被构造为采集所述预警检测机构的数据,并基于所述预警检测机构的采集数据,确定入侵分布区域密度及范围;所述处理器分别与所述检测装置、所述预警装置、所述处理装置、所述调节装置控制连接,并基于所述处理器的控制操作对各个装置进行集中的调控,保证对外来生物能够精准的识别、防控或者防治;所述检测装置与所述预警装置相互配合使用,使得所述检测装置检测到的数据均能被精准的识别,并基于所述检测装置的检测数据触发预警信号;所述预警装置和所述处理装置相互配合,并对入侵生物进行处理;在本实施例中,所述入侵生物特指入侵植物;所述调节装置与所述预警装置相互配合,并对所述入侵植物的繁殖或者入侵的速度进行检测,并触发对所述入侵植物的处理操作;所述防治系统还包括支撑装置,所述支撑装置被构造为对所述处理装置进行支撑,并嵌套或者固定在所述入侵植物的外周,使得通过对所述入侵生物进行处理,提升整个防治的效果;所述支撑装置包括限制座和防护罩,所述防护罩被构造为与所述限制座可拆卸连接,且所述防护罩设置为充气式的;所述限制座被构造为设有限制槽,所述限制槽被构造为沿着所述限制座的长度方向沿着,且所述限制槽被构造为与所述限制座同轴设置;
55.所述检测装置被构造为识别目标区域,其中该目标区域包括有害植物种类;所述检测装置被构造为选择处理时间,其中目标区域中的有害植物种类相互作用;所述检测装置还被构造为对目标区域的第一部署位置提供采集检测单元,所述采集检测单元被构造为对所述目标区域中的植物数据进行采集,并采集所述植物的生存环境;所述检测装置与所述预警装置相互配配合使用,使得所述预警装置基于所述检测装置的检测过程中,能够基于所述检测装置的检测数据触发对所述入侵植物的预警信号的触发;另外,所述检测装置包括识别相机和统计机构,所述识别相机设置在所述统计机构上;所述统计机构被构造为对目标区域中的种类进行采集;所述统计机构包括无人机和数据传输构件,所述数据传输构件被构造为对所述无人机构进行支撑,并通过设置在所述无人机上的所述识别相机对所述目标区域中的有害植物或者入侵植物进行分布图的采集;在本实施例中,首先通过,应用所述统计机构对外来物种进行数据捕捉,并对该目标区域中的物种的分布进行数据的调理;从而获得外来物种的分布的位置数据;其次,利用外来物种的分布的位置数据,进行外来物种的实地调查与信息验证,获得外来物种的实际位置数据;同时,通过所述预警装置基于所述检测装置的检测数据,尤其是所述统计机构的数据进行采集,并由所述预警装置对所述目标区域进行预警;所述数据传输构件包括识别板、支撑平台、支撑座、抬升单元和限
制区域,所述识别板被构造为设置在所述支撑平台的顶部,用于与所述无人机的采集的数据进行传输或者落地;所述抬升单元被构造为与所述支撑平台进行连接,用于对所述支撑平台的高度进行调整;所述抬升单元包括抬升杆和抬升驱动机构,所述抬升杆的一端与所所述支撑平台进行垂直固定连接,且所述抬升杆的一端与所述支撑平台的下底部进行垂直固定连接,所述抬升杆的另一端与支撑座进行连接;所述抬升驱动机构被构造为对所述抬升杆驱动连接;同时,所述统计机构还包括数据传输件,所述数据传输件被构造为设置在所述无人机的底部,并用于与所述识别板进行数据的传输;且当所述无人机停靠在所述支撑平台上时,对通过所述数据传输件与所述识别板进行数据的传输;另外,所述检测装置还包括限制机构,所述限制机构被构造为对所述统计机构的统计范围进行限定,用于对在所述识别目标中的各个入侵物种进行精准的统计;所述限制机构包括若干个限制构件和若干个定位标记件,各个所述定位标记件被构造为对应设置在各个所述限制构件上,并实时的对向着所述统计构件或者所述处理器实时的反馈定位信息;所述统计机构和所述限制机构之间的配合使用,使得对所述无人机连同所述识别相机能够对所述目标区域中的入侵植物进行精准的识别,进一步的提升对所述入侵生物的识别精度;
56.各个所述限制机构可以设置所述无人机的检测范围,并对所述无人机的范围进行限定;所述限制机构包括控制构件和转向单元,所述控制构件被构造为对限定位置进行指示;所述转向单元被构造为设置在所述转动座上;所述转向单元被构造为对所述检测装置的目标区域进行限定;所述转向单元包括指示件和角度检测元件,所述角度检测元件被构造为对所述指示件的转动的角度进行检测;所述指示件被构造为对所述检测装置的目标区域的边界进行指示;所述转向单元被构造所述检测装置的目标区域的高度范围进行限定,同时,所述转向单元在对所述高度范围进行检测的过程中,需要由初始位置抬升设定的仰角,通过两个所述仰角之间的差值得出所述检测装置的目标区域的高度范围值;所述角度检测元件被构造为对所述转动座的高度仰角和水平仰角进行检测;特别的,相邻的两个所述转动座配合使用,且以其中一个所述转动座作为参照参数,另一转动座基于参照参数的基础上沿着水平范围偏转或者在高度范围内仰角,则两个配对的转动座的偏移范围或者角度就能度精准获得,从而对所述检测装置的限制范围;所述控制构件发射出来的红外线信号为所述检测装置的显示边界,同时,在显示的过程中,若显示内容超过显示边界的界限,则通过所述处理器控制所述检测装置对所述显示机构的显示内容进行缩放,且缩放的比例由显示内容与边界之间的空间决定,并等比缩放;另外,对于所述无人机在所述限制范围内进行活动,同时,还能依据转向单元对飞行高度的限制;
57.所述检测装置包括导向机构和辅助机构,所述辅助机构被构造为对所述限制机构的显示角度进行调整;所述导向机构被构造为对所述辅助机构的位置进行转移;所述导向机构包括导向轨道、导向座、行程标记件和导向驱动机构,各个所述行程标记件被构造为对沿着所述导向轨道的长度方向等间距的分布;所述导向座被构造为与所述导向轨道滑动卡接;所述导向驱动机构被构造为对所述导向座驱动连接;所述检测装置对所述检测装置的显示的角度或显示的区域进行调整;所述导向机构与所述导向机构进行配合使得所述检测装置的限制范围能够被精准的捕捉并显示出来;所述导向座与所述辅助机构连接,并在所述导向驱动机构的驱动操作下实现对所述辅助机构的位置的转移,使得所述无人机能够对所述目标区域进行识别同时还能够基于所述导向机构和所述辅助机构对飞行的高度进行
限制,保证识别的精准和准确;
58.所述导向座还基于所述统计机构之间进行配合使用,使得所述检测装置基于所述无人机实时传输的数据进行调整,即:所述辅助机构转动的参数,需要根据所述无人机实时传输的数据的各个所述偏移座的水平范围数据和高度范围数据进行目标区域的精准识别或者高度限制。
59.在上述实施例中,对各个实施例的描述都各有侧重,某个实施例中没有详述或记载的部分,可以参见其它实施例的相关描述。
60.虽然上面已经参考各种实施例描述了本发明,但是应当理解,在不脱离本发明的范围的情况下,可以进行许多改变和修改。也就是说上面讨论的方法,系统和设备是示例。各种配置可以适当地省略,替换或添加各种过程或组件。例如,在替代配置中,可以以与所描述的顺序不同的顺序执行方法,和/或可以添加,省略和/或组合各种部件。而且,关于某些配置描述的特征可以以各种其他配置组合,如可以以类似的方式组合配置的不同方面和元素。此外,随着技术发展其中的元素可以更新,即许多元素是示例,并不限制本公开或权利要求的范围。
61.在说明书中给出了具体细节以提供对包括实现的示例性配置的透彻理解。然而,可以在没有这些具体细节的情况下实践配置例如,已经示出了众所周知的电路,过程,算法,结构和技术而没有不必要的细节,以避免模糊配置。该描述仅提供示例配置,并且不限制权利要求的范围,适用性或配置。相反,前面对配置的描述将为本领域技术人员提供用于实现所描述的技术的使能描述。在不脱离本公开的精神或范围的情况下,可以对元件的功能和布置进行各种改变。
62.综上,其旨在上述详细描述被认为是例示性的而非限制性的,并且应当理解,以上这些实施例应理解为仅用于说明本发明而不用于限制本发明的保护范围。在阅读了本发明的记载的内容之后,技术人员可以对本发明作各种改动或修改,这些等效变化和修饰同样落入本发明权利要求所限定的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1