一种钵苗自动移栽机的制作方法
1.本发明涉及移栽机领域,特别的,是一种钵苗自动移栽机。
背景技术:
2.移栽机是大面积种植秧苗作业中被广泛使用的设备,其带有的开沟器、喂入器、导苗管、覆压轮等工作部件,能配合完成开沟、导苗、覆土等工作,代替传统的人工栽植流程,为栽植人员省时省力,现有的钵苗自动移栽机口容易在使用过程中出现以下弊端:
3.由于钵苗是伴随着开关板打开而进入导苗管内部,在开关板打开时,其切面端口将会向下倾斜,钵苗沿开关板向导苗管内部滑入,使得钵苗底部的圆柱形营养土会在滑入过程中,被开关板集中挤压而变形,甚至摩擦过大而松软残留在其切面端口上,不仅造成钵苗在种植时,缺失相应营养,还导致开关板在下一引导过程中打开直径变小,降低设备的使用效率。
技术实现要素:
4.针对上述问题,本发明提供一种钵苗自动移栽机,其结构包括入料管、震平座、栽苗架、定位筒、导苗管,所述入料管通过导苗管连接在震平座上,所述震平座上连接有定位筒,且其底部连接有栽苗架,所述导苗管包括稳固杆、拉杆、弹垫、开关板、筒体,所述稳固杆和弹垫均连接在筒体上,所述筒体连接在入料管上,且其顶部通过拉杆设置有开关板,所述拉杆间接配合在弹垫上。
5.作为本发明的进一步改进,所述开关板包括套环、助弹件、拢和装置、转轴、内置格、扎盘,所述套环通过转轴连接在筒体上,且其内部设置拢和装置,所述拢和装置间接配合在助弹件内,所述助弹件安装在内置格内。
6.作为本发明的进一步改进,所述内置格连接在拉杆上,且连接有扎盘,为内置格的变形做好拉伸定位,有效衔接于拢和装置运动方向。
7.作为本发明的进一步改进,所述助弹件包括弹簧、压板、卡扣、收兜、叠布、顶囊,所述弹簧通过卡扣连接在压板上,所述压板上连接有叠布。
8.作为本发明的进一步改进,所述叠布与拢和装置间接配合,且过渡配合在收兜上,具有一个反向的挤压作用力,使得拢和装置呈稳固水平支撑。
9.作为本发明的进一步改进,所述拢和装置包括矛套、排板、承接斗,两个所述矛套连接在承接斗上,且间接配合在套环和叠布内,所述承接斗上设有排板。
10.作为本发明的进一步改进,所述排板包括轴轮、抚扣件、斜板、爪圈,所述轴轮通过抚扣件转动配合承接斗上,所述抚扣件上安装有斜板,所述斜板连接在爪圈上,且与承接斗连接在一起,所述爪圈连接在叠布上。
11.作为本发明的进一步改进,所述抚扣件包括侧排道、弧板、嵌槽、导板、滚珠,所述侧排道连接在导板和轴轮中部,所述导板上开设有两个以上的嵌槽,且与斜板之间连接有弧板,所述嵌槽内滚动配合有滚珠。
12.有益效果
13.与现有技术相比,本发明的有益效果:
14.1、本发明在开关板上设置助弹件和拢和装置,利用助弹件和拢和装置在内置格上相配合,当开关板对钵苗集中引导时,将会带动两个拢和装置通过挤压内置格在助弹件上弯折收拢,使得钵苗的圆柱底部被始终保持着,并将掉落的营养土再次借助拢和装置抹平在圆柱底部,保证钵苗的圆柱底部形状始终紧致,能顺利导入导苗管内部。
15.2、本发明因叠布中部折叠放置在收兜内部,其向收兜外部呈绷直状,推动其百叶结构两端能够下垂至顶囊上,从而对叠布具有一定的向上推动作用力。
16.3、本发明通过嵌槽内滚动着滚珠,可以有效的减小了爪圈推动钵苗时的阻力,以增加其与钵苗接触后的稳固,还可以加快将掉落的营养土再次引导铺平糊回去。
附图说明
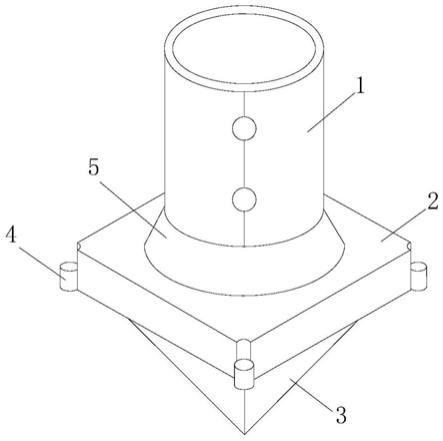
17.图1为本发明一种钵苗自动移栽机的结构示意图。
18.图2为本发明定位筒的剖面结构示意图。
19.图3为本发明开关板的俯视结构示意图。
20.图4为本发明助弹件的平面结构示意图。
21.图5为本发明拢和装置的平面结构示意图。
22.图6为本发明排板的侧面结构示意图。
23.图7为本发明抚扣件的平面结构示意图。
24.图中:入料管
‑
1、震平座
‑
2、栽苗架
‑
3、定位筒
‑
4、导苗管
‑
5、稳固杆
‑
51、拉杆
‑
52、弹垫
‑
53、开关板
‑
54、筒体
‑
55、套环
‑
541、助弹件
‑
542、拢和装置
‑
543、转轴
‑
544、内置格
‑
545、扎盘
‑
546、弹簧
‑
421、压板
‑
422、卡扣
‑
423、收兜
‑
424、叠布
‑
425、顶囊
‑
426、矛套
‑
431、排板
‑
432、承接斗
‑
433、轴轮
‑
2a1、抚扣件
‑
2a2、斜板
‑
2a3、爪圈
‑
2a4、侧排道
‑
a21、弧板
‑
a22、嵌槽
‑
a23、导板
‑
a24、滚珠
‑
a25。
具体实施方式
25.基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
26.实施例1
27.如图1
‑
图3所示,本发明提供一种钵苗自动移栽机,其结构包括入料管1、震平座2、栽苗架3、定位筒4、导苗管5,所述入料管1通过导苗管5垂直固定连接在震平座2上,所述震平座2四角焊接连接有定位筒4,且其底部嵌接连接有栽苗架3,所述导苗管5包括稳固杆51、拉杆52、弹垫53、开关板54、筒体55,所述稳固杆51和弹垫53均固定连接在筒体55外部,所述筒体55套接连接在入料管1底部,且其顶部通过拉杆52设置有开关板54,所述拉杆52间接配合在弹垫53上,所述开关板54包括套环541、助弹件542、拢和装置543、转轴544、内置格545、扎盘546,所述套环541通过转轴544铰接连接在筒体55上,且其内部设置有两个结构大小一致的拢和装置543,所述拢和装置543间接配合在助弹件542内部,所述助弹件542安装在内置格545内部,所述内置格545为网格状结构,其底部倾斜固定连接在有拉杆52,且边缘处套接连接有扎盘546,为内置格545的变形做好拉伸定位,有效衔接于拢和装置543运动方向,
在开关板54上设置助弹件542和拢和装置543,利用助弹件542和拢和装置543在内置格545上相配合,当开关板54对钵苗集中引导时,将会带动两个拢和装置543通过挤压内置格545在助弹件542上弯折收拢,使得钵苗的圆柱底部被始终保持着,并将掉落的营养土再次借助拢和装置543抹平在圆柱底部,保证钵苗的圆柱底部形状始终紧致,能顺利导入导苗管5内部。
28.实施例2
29.如图4
‑
图7所示,在实施例1的基础上,本发明结合以下结构部件的相互配合,所述助弹件542包括弹簧421、压板422、卡扣423、收兜424、叠布425、顶囊426,所述弹簧421通过卡扣423焊接连接在压板422两侧,所述压板422底部嵌接连接有叠布425,且间接配合在顶囊426上,所述顶囊426之间固定连接有收兜424,所述叠布425的横截面呈百叶状,与拢和装置543间接配合,且过渡配合在收兜424的开口端,具有一个反向的挤压作用力,使得拢和装置543呈稳固水平支撑,所述拢和装置包括矛套431、排板432、承接斗433,两个所述矛套431垂直套接连接在承接斗433两侧,且间接配合在套环541和叠布425内部,所述承接斗433底部设有排板432,所述排板432包括轴轮2a1、抚扣件2a2、斜板2a3、爪圈2a4,所述轴轮2a1通过抚扣件2a2转动配合承接斗433底部,所述抚扣件2a2外部安装有斜板2a3,所述斜板2a3焊接连接在爪圈2a4内部,且与承接斗433的凹槽结构底部套接连接在一起,所述爪圈2a4扣接连接在叠布425上,所述抚扣件2a2包括侧排道a21、弧板a22、嵌槽a23、导板a24、滚珠a25,所述侧排道a21麻花状结构,焊接连接在导板a24和轴轮2a1中部,所述导板a24上开设有两个以上的嵌槽a23,且孤形边缘与斜板2a3之间铰接连接有弧板a22,所述嵌槽a23内部滚动配合有滚珠a25,因叠布425中部折叠放置在收兜424内部,其向收兜424外部呈绷直状,推动其百叶结构两端能够下垂至顶囊426上,从而对叠布425具有一定的向上推动作用力,通过嵌槽a23内滚动着滚珠a25,可以有效的减小了爪圈2a4推动钵苗时的阻力,以增加其与钵苗接触后的稳固,还可以加快将掉落的营养土再次引导铺平糊回去。
30.下面对上述技术方案中的一种钵苗自动移栽机的工作原理作如下说明:
31.本发明在使用过程中,当钵苗底部的圆柱形营养土滑入时,为避免集中导入过程中被开关板54挤压变形,因此,在开关板54上设置有助弹件542和拢和装置543,首先,其钵苗放置在承接斗433之间,随着套环541沿转轴544向下转动,钵苗会在套环541内,整体朝内置格545方向倾斜运动,因钵苗从套环541滑动至内置格545中,其底部将会少量营养体残留至承接斗433上,且两侧的矛套431受重力朝内置格545倾斜方向在叠布425内转动,连带承接斗433沿内置格545外转动,给叠布425的百叶结构带来初步的折叠趋势,而同时,内置格545顺着拉杆52的牵引,折叠向下挤压压板422,压板422将沿着两侧卡扣423,且将叠布425的百叶结构折叠向下,两端下垂撞击顶囊426,嵌入顶囊426内部,并利用弹簧421的弹力中部呈弧形绷直状地收纳在收兜424内部,拉近拢和装置543与钵苗的底部的距离,且使得两个拢和装置543能垂直囊括住钵苗的底部,又通过承接斗433与侧排道a21两侧对接,将会在拢和装置543转动过程中,把营养土从引导至侧排道a21上,顺着其麻花状结构,翻卷堆积至弧板a22和导板a24之间,再通过导板a24上滚珠a25不断顺时针滚动,使其能不仅更加贴合和抓紧钵苗的底部,还将营养土从斜板2a3上引导贴合抹回在钵苗的底部上,再顺着扎盘546上的环形扎齿向下,为钵苗的底部的圆柱结构做进一步加固,保证钵苗的底部的完整性,不会残留营养土在设备上。
32.在本发明的描述中,需要理解的是,术语“中心”、“侧向”、“长度”、“宽度”、“高度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“侧”等指示的方位或位置关系为基于附图中所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
33.以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1