一种节水灌溉控制系统及控制方法
1.本发明属于农业控制技术领域,尤其涉及一种节水灌溉控制系统及控制方法。
背景技术:
2.目前,我国水资源严重缺乏,人均水资源占有量只有2200立方米,仅为世界平均水平的四分之一。受季风气候和地形条件影响,水资源时空分布极不均衡,南方水多耕地少,北方水少耕地多,干旱缺水已成为我国北方地区的主要问题。另外,我国农业是用水大户,其用水量约占全国用水总量的70%,在西北地区则占到90%。所以,为实现水资源的可持续利用,促进经济社会的可持续发展,大力发展节水灌溉是一种必然选择。
3.现有我国的农田机井灌溉系统末端普遍采用手动开关水泵、人工计量计费的方式。这种灌溉方式存在以下问题:不便于水资源的快速及时调度;用水量计量精度较低,容易造成水资源的浪费;管理人劳动强度大。因此,亟需一种节水灌溉控制系统及控制方法。
4.通过上述分析,现有技术存在的问题及缺陷为:现有的灌溉方法不便于水资源的快速及时调度;用水量计量精度较低,容易造成水资源的浪费;管理人劳动强度大。
技术实现要素:
5.针对现有技术存在的问题,本发明提供了一种节水灌溉控制系统及控制方法。
6.本发明是这样实现的,一种节水灌溉控制系统,所述节水灌溉控制系统,包括:
7.图像采集模块,与中央控制模块连接,用于通过图像采集设备对种植区的环境图像信息进行采集;
8.图像处理模块,与中央控制模块连接,用于通过图像处理程序对采集的种植区域的图像数据进行处理,包括:
9.估计拍摄所述环境图像时的环境光的反射特性;
10.计算基于所述环境光的反射特性来对所述像素的明度进行校正的校正值;
11.将所述校正值与所述像素相加来对所述像素的明度进行校正;
12.作物图像提取模块,与中央控制模块连接,用于通过图像提取程序基于处理后的种植区域的图像数据进行作物图像的提取,包括:
13.获取预处理后种植区域图像数据进行向量转化,得到作物图像的灰度图像;
14.根据得到的作物图像的灰度图像计算边框及区域的初步处理,利用分水岭算法进行第一次实体分割;
15.分割后得到不同区域,计算其区域图像像素强度平均值;
16.将区域像素强度平均值作为入参,通过k均值聚类算法进行作物目标与种植区域背景图像,并将分离结果进行第二次实体分割,得到作物的图像;
17.分析模块,与中央控制模块连接,用于通过分析程序基于提取的作物图像进行分析,得到作物状态分析结果;
18.灌溉确定模块,与中央控制模块连接,用于基于采集的环境数据以及作物状态分
析结果确定作物是否需要灌溉;
19.灌溉参数计算模块,与中央控制模块连接,用于通过参数计算程序基于采集的种植作物信息、环境数据以及作物状态分析结果计算本次灌溉的参数;
20.其中,所述基于种植区域有效降水量以及作物需水量确定灌溉水量,计算公式如下:
[0021][0022]
其中,et
c
表示灌溉需求水量,p0表示种植区域有效降水量;
[0023]
所述种植区域作物灌溉需求水量计算公式如下:
[0024]
et
c
=k
w
×
k
c
×
et0;;
[0025]
其中,et0表示作物的蒸散量,k
w
表示土壤水分修正系数,k
c
表示作物系数;
[0026]
所述土壤水分修正系数k
w
计算公式如下:
[0027][0028]
其中,w
p
表示凋萎含水量,w
j
表示毛管断裂含水量;
[0029]
判断模块,与中央控制模块连接,用于当作物需要灌溉时判断水箱内当其存水量是否满足灌溉要求;
[0030]
灌溉模块,与中央控制模块连接,用于基于确定的灌溉参数调节灌溉设备的相关参数进行作物灌溉;
[0031]
农业数据获取模块,与中央控制模块连接,用于通过农业数据获取设备获取待灌溉的产物的种类、数量以及种植区域的相关数据;
[0032]
环境数据采集模块,与中央控制模块连接,用于通过环境数据采集程序对种植区域的相应环境数据进行采集;
[0033]
储存水量采集模块,与中央控制模块连接,用于通过水量采集设备获取储水箱中目前存储的水量数据;
[0034]
中央控制模块,与农业数据获取模块、环境数据采集模块、储存水量采集模块、图像采集模块、图像处理模块、作物图像提取模块、分析模块、灌溉确定模块、灌溉参数计算模块、判断模块、灌溉模块以及回收模块连接,用于通过中央处理器协调控制所述节水灌溉控制系统各个模块的正常工作;
[0035]
回收模块,与中央控制模块连接,用于通过回收装置回收可回收的水资源,并进行处理后二次应用。
[0036]
进一步,所述环境数据采集模块包括:
[0037]
降水数据获取单元,用于基于气象卫星观测数据预计本地区的预期降水量;
[0038]
环境温度数据采集单元,用于利用温度传感器采集环境温度数据;
[0039]
环境湿度数据采集单元,用于利用湿度传感器采集环境温度数据;
[0040]
土壤的温度单元,用于利用土壤测温计采集土壤温度数据;
[0041]
湿度数据单元,用于利用湿度传感器采集环境温度数据。
[0042]
进一步,图像处理模块中,所述估计拍摄所述环境图像时的环境光的反射特性,包括:
[0043]
通过向所述图像应用平滑化来估计所述环境光的反射特性。
[0044]
进一步,图像处理模块中,所述计算基于所述环境光的反射特性来对所述像素的明度进行校正的校正值,包括:
[0045]
获取所述环境图像中的灰度分量图像,并将所述灰度分量图像的像素点的数据类型从byte型转换成为double型;
[0046]
将所述灰度分量图像放入对数域中进行处理,得到增强灰度分量图像;利用高斯模板对所述增强灰度分量图像做卷积,得到低通滤波灰度分量图像;
[0047]
将所述低通滤波灰度分量图像放入对数域中进行处理,得到高斯平滑后的灰度分量图像;
[0048]
获取所述环境光的反射特性,计算所述灰度分量图像的像素点与所述高斯平滑后的灰度分量图像的像素点之间的相对明暗关系;
[0049]
基于所述环境光的反射特性,根据所述相对明暗关系对所述增强灰度分量图像的像素点进行灰度值校正。
[0050]
进一步,所述利用高斯模板对所述增强灰度分量图像做卷积的公式如下:
[0051]
d(x,y)=s(x,y)*f(x,y);
[0052]
其中,d(x,y)为所述低通滤波灰度分量图像,s(x,y)为所述原始图像,f(x,y)为高斯滤波函数。
[0053]
进一步,所述计算所述灰度分量图像的像素点与所述高斯平滑后的灰度分量图像的像素点之间的相对明暗关系的公式如下:
[0054]
relation(x,y)=log d(x,y)
‑
logs(x,y);
[0055]
其中,relation(x,y)为关系函数,log d(x,y)为所述低通滤波灰度分量图像的对数,log s(x,y)为所述原始图像的对数。
[0056]
进一步,作物图像提取模块中,所述获取预处理后的种植区域图像数据,进行向量转化,得到作物图像的灰度图像包括:
[0057]
把预处理后的种植区域环境图像处理为rgb彩色格式,并对预处理后的种植区域环境图像进行向量转化;
[0058]
对于预处理后的种植区域环境图像的像素减去平均值,进行正则化处理;
[0059]
进行预处理后的种植区域环境图像颜色调整,将图像颜色由rgb彩色格式调整为hsv格式;
[0060]
利用hsv的颜色定义,根据参数对调整为hsv格式的预处理后的种植区域环境图像提取其灰度图像。
[0061]
进一步,作物图像提取模块中,所述根据得到的作物图像的灰度图像计算边框及区域的初步处理,利用分水岭算法进行第一次实体分割;分割后得到不同区域,计算其区域图像像素强度平均值包括:
[0062]
将获取种植区域环境图像的灰度图像进行边缘的提取;将提取出的边缘,进行倒数计算,并进行欧式距离计算;
[0063]
对计算的距离,根据设定的参数最短距离寻找区域内最大数值点所在位置;
[0064]
根据计算区域最大数值,根据区域对每一个像素打标;根据打标的像素和计算的欧式距离求负数,利用分水岭算法进行一个区域的划分;
[0065]
根据分水岭的结果区域,及灰度图像来计算区域的平均像素。
[0066]
本发明的另一目的在于提供一种存储在计算机可读介质上的计算机程序产品,包括计算机可读程序,供于电子装置上执行时,提供用户输入接口以应用所述的节水灌溉控制系统。
[0067]
本发明的另一目的在于提供一种计算机可读存储介质,储存有指令,当所述指令在计算机上运行时,使得计算机执行所述的节水灌溉控制系统。
[0068]
结合上述的所有技术方案,本发明所具备的优点及积极效果为:本发明提供的节水灌溉控制系统,通过进行种植区域环境图像的采集进行作物图像的提取,并对作物状态进行分析处理,并结合环境温度、湿度以及土壤温度、湿度数据智能化判断作物是否需要灌溉,并基于相应的数据自动化计算灌溉参数,进行灌溉,不仅能够节约水资源,同时消除了人工判断的不准确性,提升节水灌溉控制的智能化程度。
附图说明
[0069]
为了更清楚地说明本申请实施例的技术方案,下面将对本申请实施例中所需要使用的附图做简单的介绍,显而易见地,下面所描述的附图仅仅是本申请的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下还可以根据这些附图获得其他的附图。
[0070]
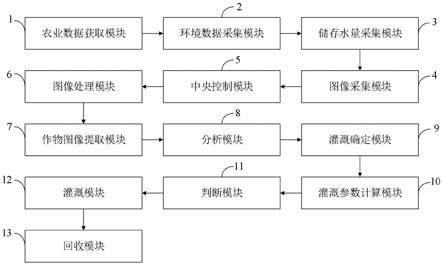
图1是本发明实施例提供的节水灌溉控制系统结构示意图;
[0071]
图中:1、农业数据获取模块;2、环境数据采集模块;3、储存水量采集模块;4、图像采集模块;5、中央控制模块;6、图像处理模块;7、作物图像提取模块;8、分析模块;9、灌溉确定模块;10、灌溉参数计算模块;11、判断模块;12、灌溉模块;13、回收模块。
[0072]
图2本发明实施例提供的节水灌溉控制方法流程图。
[0073]
图3是本发明实施例提供的通过图像处理模块利用图像处理程序对采集的种植区域的图像数据进行处理的方法流程图。
[0074]
图4是本发明实施例提供的计算基于所述环境光的反射特性来对所述像素的明度进行校正的校正值的方法流程图。
[0075]
图5是本发明实施例提供的通过作物图像提取模块利用图像提取程序基于处理后的种植区域的图像数据进行作物图像的提取的方法流程图。
具体实施方式
[0076]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
[0077]
针对现有技术存在的问题,本发明提供了一种节水灌溉控制系统及控制方法,下面结合附图对本发明作详细的描述。
[0078]
如图1所示,本发明实施例提供的节水灌溉控制系统包括:
[0079]
图像采集模块1,与中央控制模块12连接,用于通过图像采集设备对种植区的环境
图像信息进行采集;
[0080]
图像处理模块2,与中央控制模块12连接,用于通过图像处理程序对采集的种植区域的图像数据进行处理;
[0081]
作物图像提取模块3,与中央控制模块12连接,用于通过图像提取程序基于处理后的种植区域的图像数据进行作物图像的提取;
[0082]
分析模块4,与中央控制模块12连接,用于通过分析程序基于提取的作物图像进行分析,得到作物状态分析结果;
[0083]
灌溉确定模块5,与中央控制模块12连接,用于基于采集的环境数据以及作物状态分析结果确定作物是否需要灌溉;
[0084]
灌溉参数计算模块6,与中央控制模块12连接,用于通过参数计算程序基于采集的种植作物信息、环境数据以及作物状态分析结果计算本次灌溉的参数;
[0085]
判断模块7,与中央控制模块12连接,用于当作物需要灌溉时判断水箱内当其存水量是否满足灌溉要求;
[0086]
灌溉模块8,与中央控制模块12连接,用于基于确定的灌溉参数调节灌溉设备的相关参数进行作物灌溉;
[0087]
农业数据获取模块9,与中央控制模块12连接,用于通过农业数据获取设备获取待灌溉的产物的种类、数量以及种植区域的相关数据;
[0088]
环境数据采集模块10,与中央控制模块12连接,用于通过环境数据采集程序对种植区域的相应环境数据进行采集;
[0089]
储存水量采集模块11,与中央控制模块12连接,用于通过水量采集设备获取储水箱中目前存储的水量数据;
[0090]
中央控制模块12,与农业数据获取模块1、环境数据采集模块2、储存水量采集模块3、图像采集模块4、图像处理模块5、作物图像提取模块6、分析模块7、灌溉确定模块8、灌溉参数计算模块9、判断模块10、灌溉模块11以及回收模块13连接,用于通过中央处理器协调控制所述节水灌溉控制系统各个模块的正常工作;
[0091]
回收模块13,与中央控制模块12连接,用于通过回收装置回收可回收的水资源,并进行处理后二次应用。
[0092]
本发明实施例提供的环境数据采集模块2包括:
[0093]
降水数据获取单元2
‑
1,用于基于气象卫星观测数据预计本地区的预期降水量;
[0094]
环境温度数据采集单元2
‑
2,用于利用温度传感器采集环境温度数据;
[0095]
环境湿度数据采集单元2
‑
3,用于利用湿度传感器采集环境温度数据;
[0096]
土壤的温度单元2
‑
4,用于利用土壤测温计采集土壤温度数据;
[0097]
湿度数据单元2
‑
5,用于利用湿度传感器采集环境温度数据。
[0098]
如图2所示,本发明实施例提供节水灌溉控制方法包括:
[0099]
s101,通过图像采集模块利用图像采集设备对种植区的环境图像信息进行采集;通过图像处理模块利用图像处理程序对采集的种植区域的图像数据进行处理;
[0100]
s102,通过作物图像提取模块利用图像提取程序基于处理后的种植区域的图像数据进行作物图像的提取;
[0101]
s103,通过分析模块利用分析程序基于提取的作物图像进行分析,得到作物状态
分析结果;通过灌溉确定模块基于采集的环境数据以及作物状态分析结果确定作物是否需要灌溉;
[0102]
s104,通过灌溉参数计算模块利用参数计算程序基于采集的种植作物信息、环境数据以及作物状态分析结果计算本次灌溉的参数;
[0103]
s105,通过判断模块当作物需要灌溉时判断水箱内当其存水量是否满足灌溉要求;通过灌溉模块基于确定的灌溉参数调节灌溉设备的相关参数进行作物灌溉;
[0104]
s106,通过农业数据获取模块利用农业数据获取设备获取待灌溉的产物的种类、数量以及种植区域的相关数据;
[0105]
s107,通过环境数据采集模块利用环境数据采集程序对种植区域的相应环境数据进行采集;通过储存水量采集模块利用水量采集设备获取储水箱中目前存储的水量数据;
[0106]
s108,通过中央控制模块利用中央处理器协调控制所述节水灌溉控制系统各个模块的正常工作;通过回收模块利用回收装置回收可回收的水资源,并进行处理后二次应用。
[0107]
本发明实施例提供的步骤s104中,所述通过灌溉参数计算模块基于采集的种植作物信息、环境数据以及作物状态分析结果计算本次灌溉的参数包括:
[0108]
(1)基于种植区域有效降水量以及作物需水量确定灌溉水量,计算公式如下:
[0109][0110]
其中,et
c
表示灌溉需求水量,p0表示种植区域有效降水量;
[0111]
(2)种植区域作物灌溉需求水量计算公式如下:
[0112]
et
c
=k
w
×
k
c
×
et0;
[0113]
其中,et0表示作物的蒸散量,k
w
表示土壤水分修正系数,k
c
表示作物系数;
[0114]
(3)土壤水分修正系数k
w
计算公式如下:
[0115][0116]
其中,w
p
表示凋萎含水量,w
j
表示毛管断裂含水量。
[0117]
下面结合具体实施例对本发明作进一步描述。
[0118]
实施例1
[0119]
本发明实施例提供的节水灌溉控制方法如图1所示,作为优选实施例,如图3所示,本发明实施例提供的通过图像处理模块利用图像处理程序对采集的种植区域的图像数据进行处理的方法包括:
[0120]
s201,估计拍摄所述环境图像时的环境光的反射特性;
[0121]
s202,计算基于所述环境光的反射特性来对所述像素的明度进行校正的校正值;
[0122]
s203,将所述校正值与所述像素相加来对所述像素的明度进行校正。
[0123]
本发明实施例提供的步骤s201中,所述估计拍摄所述环境图像时的环境光的反射特性包括:通过向所述图像应用平滑化来估计所述环境光的反射特性。
[0124]
如图4所示,本发明实施例提供的步骤s202中,所述计算基于所述环境光的反射特性来对所述像素的明度进行校正的校正值,包括:
[0125]
s301,获取所述环境图像中的灰度分量图像,并将所述灰度分量图像的像素点的数据类型从byte型转换成为double型;
[0126]
s302,将所述灰度分量图像放入对数域中进行处理,得到增强灰度分量图像;利用高斯模板对所述增强灰度分量图像做卷积,得到低通滤波灰度分量图像;
[0127]
s303,将所述低通滤波灰度分量图像放入对数域中进行处理,得到高斯平滑后的灰度分量图像;
[0128]
s304,获取所述环境光的反射特性,计算所述灰度分量图像的像素点与所述高斯平滑后的灰度分量图像的像素点之间的相对明暗关系;
[0129]
s305,基于所述环境光的反射特性,根据所述相对明暗关系对所述增强灰度分量图像的像素点进行灰度值校正。
[0130]
本发明实施例提供的步骤s302中,所述利用高斯模板对所述增强灰度分量图像做卷积的公式如下:
[0131]
d(x,y)=s(x,y)*f(x,y);
[0132]
其中,d(x,y)为所述低通滤波灰度分量图像,s(x,y)为所述原始图像,f(x,y)为高斯滤波函数。
[0133]
本发明实施例提供的步骤s304中,所述计算所述灰度分量图像的像素点与所述高斯平滑后的灰度分量图像的像素点之间的相对明暗关系的公式如下:
[0134]
relation(x,y)=log d(x,y)
‑
logs(x,y);
[0135]
其中,relation(x,y)为关系函数,log d(x,y)为所述低通滤波灰度分量图像的对数,log s(x,y)为所述原始图像的对数。
[0136]
实施例2
[0137]
本发明实施例提供的节水灌溉控制方法如图1所示,作为优选实施例,如图5所示,本发明实施例提供的通过作物图像提取模块利用图像提取程序基于处理后的种植区域的图像数据进行作物图像的提取的方法包括:
[0138]
s401,获取预处理后种植区域图像数据进行向量转化,得到作物图像的灰度图像;
[0139]
s402,根据得到的作物图像的灰度图像计算边框及区域的初步处理,利用分水岭算法进行第一次实体分割;
[0140]
s403,分割后得到不同区域,计算其区域图像像素强度平均值;
[0141]
s404,将区域像素强度平均值作为入参,通过k均值聚类算法进行作物目标与种植区域背景图像,并将分离结果进行第二次实体分割,得到作物的图像。
[0142]
本发明实施例提供的步骤s401中,所述获取预处理后的种植区域图像数据,进行向量转化,得到作物图像的灰度图像,包括:
[0143]
把预处理后的种植区域环境图像处理为rgb彩色格式,并对预处理后的种植区域环境图像进行向量转化;
[0144]
对于预处理后的种植区域环境图像的像素减去平均值,进行正则化处理;
[0145]
进行预处理后的种植区域环境图像颜色调整,将图像颜色由rgb彩色格式调整为hsv格式;
[0146]
利用hsv的颜色定义,根据参数对调整为hsv格式的预处理后的种植区域环境图像提取其灰度图像。
[0147]
本发明实施例提供的步骤s402中,所述根据得到的作物图像的灰度图像计算边框及区域的初步处理,利用分水岭算法进行第一次实体分割;分割后得到不同区域,计算其区域图像像素强度平均值,包括:
[0148]
将获取种植区域环境图像的灰度图像进行边缘的提取;将提取出的边缘,进行倒数计算,并进行欧式距离计算;
[0149]
对计算的距离,根据设定的参数最短距离寻找区域内最大数值点所在位置;
[0150]
根据计算区域最大数值,根据区域对每一个像素打标;根据打标的像素和计算的欧式距离求负数,利用分水岭算法进行一个区域的划分;
[0151]
根据分水岭的结果区域,及灰度图像来计算区域的平均像素。
[0152]
在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上;术语“上”、“下”、“左”、“右”、“内”、“外”、“前端”、“后端”、“头部”、“尾部”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”等仅用于描述目的,而不能理解为指示或暗示相对重要性。
[0153]
在上述实施例中,可以全部或部分地通过软件、硬件、固件或者其任意组合来实现。当使用全部或部分地以计算机程序产品的形式实现,所述计算机程序产品包括一个或多个计算机指令。在计算机上加载或执行所述计算机程序指令时,全部或部分地产生按照本发明实施例所述的流程或功能。所述计算机可以是通用计算机、专用计算机、计算机网络、或者其他可编程装置。所述计算机指令可以存储在计算机可读存储介质中,或者从一个计算机可读存储介质向另一个计算机可读存储介质传输,例如,所述计算机指令可以从一个网站站点、计算机、服务器或数据中心通过有线(例如同轴电缆、光纤、数字用户线(dsl)或无线(例如红外、无线、微波等)方式向另一个网站站点、计算机、服务器或数据中心进行传输)。所述计算机可读取存储介质可以是计算机能够存取的任何可用介质或者是包含一个或多个可用介质集成的服务器、数据中心等数据存储设备。所述可用介质可以是磁性介质,(例如,软盘、硬盘、磁带)、光介质(例如,dvd)、或者半导体介质(例如固态硬盘solid state disk(ssd))等。
[0154]
以上所述,仅为本发明较优的具体的实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1