一种禽畜场自动喂食机器人的制作方法
1.本发明涉及自动喂食机器人技术领域,更具体的说是一种禽畜场自动喂食机器人。
背景技术:
2.公开号为cn107173247a的发明公开了一种畜牧业用饲料高效搅拌及自动喂食设备,包括底板、搅拌装置、自动喂食装置,所述底板右上部固定有右侧板,右侧板顶部固定有顶板,顶板下方设有搅拌装置,搅拌装置包括第一l型杆、第一电机、第一连杆、第二连杆、滑槽、第二电机、搅拌轴、搅拌杆、搅拌箱和出料口,出料口下方设有自动喂食装置,本发明设有搅拌装置,通过第一连杆和第二连杆相互配合,使搅拌轴和搅拌杆转动的同时能够在搅拌箱内左右摆动,提高了搅拌效率,设有自动加水装置,在搅拌的同时进行间歇性喷水,使饲料搅拌得更加均匀,并且有助于家畜对饲料的食用和消化,给家畜补充了水分,设有自动喂食装置,能够在家畜吃食时自动下料,节省人力,方便实用。缺点是不能对禽舍进行搬运或换位。
技术实现要素:
3.本发明提供一种禽畜场自动喂食机器人,其有益效果为能对禽舍进行搬运或换位。
4.一种禽畜场自动喂食机器人,包括气缸、连接杆、气缸ii和搬运架,所述的连接杆、气缸ii和搬运架均设有两个,两个连接杆分别固定连接在气缸的气缸杆上,两个气缸ii均固定连接在连接杆上,两个搬运架分别固定连接在两个气缸ii的气缸杆上,两个搬运架分别滑动连接在两个连接杆上。
5.作为本技术方案的进一步优化,本发明一种禽畜场自动喂食机器人,所述的一种畜牧养殖用智能自动投料装置还包括齿轮、齿条架、碾碎辊、固定板、滑杆、弹簧、筛料箱和电机,固定板设置有两个,齿轮固定连接在电机的输出轴上,电机固定连接在其中一个固定板上,碾碎辊转动连接在齿条架上,齿轮与齿条架啮合,齿条架滑动连接在固定板内,两个滑杆分别穿过两个弹簧滑动连接在两个固定板内,两个弹簧均固定连接在筛料箱上,两个滑杆分别固定连接在筛料箱的左右两端,碾碎辊与筛料箱接触。
6.作为本技术方案的进一步优化,本发明一种禽畜场自动喂食机器人,所述的一种畜牧养殖用智能自动投料装置还包括出料箱、摆杆、电机ii、固定台和出料口,出料箱内设置有摆杆,摆杆固定连接在电机ii的输出轴上,电机ii固定连接在出料箱下端,出料箱下端固定连接有固定台,出料箱前端中心位置设置有出料口,两个固定板分别固定连接在出料箱的左右两端,固定台下端固定连接在气缸的气缸杆上。
7.作为本技术方案的进一步优化,本发明一种禽畜场自动喂食机器人,所述的一种畜牧养殖用智能自动投料装置还包括旋转丝杠、滑架、固定架、支撑板、滑槽、限位槽和丝杠电机,支撑板和限位槽分别设有两个,丝杠电机固定连接在固定架上,旋转丝杠固定连接在
丝杠电机的输出轴上,旋转丝杠转动连接在固定架上,滑架螺纹连接在旋转丝杠上,两个支撑板分别固定连接在固定架的左右两端,固定架上内设有滑槽,滑架滑动连接在滑槽内,两个支撑板内分别设置有限位槽,滑架左右两端分别滑动连接在两个限位槽内,滑架上端固定连接有气缸。
8.作为本技术方案的进一步优化,本发明一种禽畜场自动喂食机器人,所述的一种畜牧养殖用智能自动投料装置还包括驱动轮、轮架、滑轨、转向架、伸缩弹簧和扶正轮,轮架、滑轨、转向架和扶正轮分别设置有多组,每组分别设置有两个,驱动轮转动连接在其中两个轮架内端,两个轮架内分别设置有两个滑轨,两个转向架分别滑动连接在两个滑轨内,两个伸缩弹簧其中一端分别固定连接在轮架上,两个伸缩弹簧另一端分别固定连接在两个转向架上,两个扶正轮分别转动连接在两个转向架上,位于中间的两个轮架均固定连接在固定架的下端,位于两侧的两组轮架分别固定连接在两个支撑板的下端。
9.作为本技术方案的进一步优化,本发明一种禽畜场自动喂食机器人,所述的一种畜牧养殖用智能自动投料装置还包括固定轨道和扶正槽,固定轨道内外两端分别设置有扶正槽,多个扶正轮分别与两个扶正槽接触,驱动轮与固定轨道上端接触。
10.作为本技术方案的进一步优化,本发明一种禽畜场自动喂食机器人,所述的筛料箱上设有大小均匀的孔。
11.作为本技术方案的进一步优化,本发明一种禽畜场自动喂食机器人,所述的筛料箱位于出料箱正上方。
12.作为本技术方案的进一步优化,本发明一种禽畜场自动喂食机器人,所述的驱动轮上设有电机和抱闸。
13.作为本技术方案的进一步优化,本发明一种禽畜场自动喂食机器人,所述的固定轨道中间位置为放置禽舍位置。
14.本发明一种禽畜场自动喂食机器人的有益效果为:
15.将两个搬运架调整到合适距离后,两个搬运架整体向前移动到禽舍下方,两个气缸ii收紧将禽舍夹住最后启动气缸,两个搬运架向上移动即可将禽舍抬起,碾碎辊在反复滚动时通过两个弹簧带动筛料箱小幅度晃动防止筛料箱在下料时产生堵塞造成供料不足,该装置可以根据禽畜的生长期变化通过调节电机转速来控制饲料研磨的细小程度。
附图说明
16.下面结合附图和具体实施方法对本发明做进一步详细的说明。
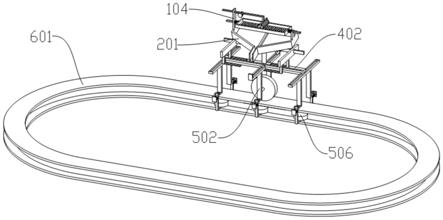
17.图1是本发明一种禽畜场自动喂食机器人的整体结构示意图;
18.图2是一种禽畜场自动喂食机器人另一方向的整体结构示意图;
19.图3是固定板的结构示意图;
20.图4是出料箱的结构示意图;
21.图5是气缸的结构示意图;
22.图6是滑架的结构示意图;
23.图7是轮架的结构示意图;
24.图8是固定轨道的结构示意图。
25.图中:齿轮101;齿条架102;碾碎辊103;固定板104;滑杆105;弹簧106;筛料箱107;
电机108;出料箱201;摆杆202;电机ii203;固定台204;出料口205;气缸301;连接杆302;气缸ii303;搬运架304;旋转丝杠401;滑架402;固定架403;支撑板404;滑槽405;限位槽406;丝杠电机407;驱动轮501;轮架502;滑轨503;转向架504;伸缩弹簧505;扶正轮506;固定轨道601;扶正槽602。
具体实施方式
26.下面结合附图对本发明作进一步详细说明。
27.具体实施方式一:
28.下面结合附图说明本实施方式一种禽畜场自动喂食机器人,包括气缸301、连接杆302、气缸ii303和搬运架304,所述的连接杆302、气缸ii303和搬运架304均设有两个,两个连接杆302分别固定连接在气缸301的气缸杆上,两个气缸ii303均固定连接在连接杆302上,两个搬运架304分别固定连接在两个气缸ii303的气缸杆上,两个搬运架304分别滑动连接在两个连接杆302上;两个气缸ii303带动两个搬运架304移动,将两个搬运架304调整到合适距离后,两个搬运架304整体向前移动到禽舍下方后,两个气缸ii303收紧将禽舍夹住最后启动气缸301,启动气缸301带动两个两个搬运架304向上移动即可将禽舍抬起,两个连接杆302起到支撑和限位作用。
29.具体实施方式二:
30.下面结合附图说明本实施方式,本实施方式对实施方式一作进一步说明,所述的一种畜牧养殖用智能自动投料装置还包括齿轮101、齿条架102、碾碎辊103、固定板104、滑杆105、弹簧106、筛料箱107和电机108,固定板104设置有两个,齿轮101固定连接在电机108的输出轴上,电机108固定连接在其中一个固定板104上,碾碎辊103转动连接在齿条架102上,齿轮101与齿条架102啮合,齿条架102滑动连接在固定板104内,两个滑杆105分别穿过两个弹簧106滑动连接在两个固定板104内,两个弹簧106均固定连接在筛料箱107上,两个滑杆105分别固定连接在筛料箱107的左右两端,碾碎辊103与筛料箱107接触;先向筛料箱107内不断加入饲料和草料混合物,然后启动电机108,电机108转动带动齿轮101转动,齿轮101转动带动齿条架102左右移动,齿条架102左右移动带动碾碎辊103在筛料箱107内滚动,碾碎辊103将饲料和草料进行反复碾压,左后碾碎成细小混合物从筛料箱107掉落,碾碎辊103在反复滚动时通过两个弹簧106带动筛料箱107小幅度晃动防止筛料箱107在下料时产生堵塞造成供料不足,该装置可以根据禽畜的生长期变化通过调节电机108转速来控制饲料研磨的细小程度。
31.具体实施方式三:
32.下面结合附图说明本实施方式,本实施方式对实施方式二作进一步说明,所述的一种畜牧养殖用智能自动投料装置还包括出料箱201、摆杆202、电机ii203、固定台204和出料口205,出料箱201内设置有摆杆202,摆杆202固定连接在电机ii203的输出轴上,电机ii203固定连接在出料箱201下端,出料箱201下端固定连接有固定台204,出料箱201前端中心位置设置有出料口205,两个固定板104分别固定连接在出料箱201的左右两端,固定台204下端固定连接在气缸301的气缸杆上;研磨好的混合饲料掉入到出料箱201内,此时电机ii203带动摆杆202摆动,对混合饲料开始进行拨动,防止混合饲料站在出料箱201底部,对混和饲料进行进一步搅拌防止饲料在出料口205处堵塞,同时操作人员可以在出料箱201内
添加各种禽畜生长所需要的药物与饲料混合在一起便于禽畜食用。
33.具体实施方式四:
34.下面结合附图说明本实施方式,本实施方式对实施方式三作进一步说明,所述的一种畜牧养殖用智能自动投料装置还包括旋转丝杠401、滑架402、固定架403、支撑板404、滑槽405、限位槽406和丝杠电机407,支撑板404和限位槽406分别设有两个,丝杠电机407固定连接在固定架403上,旋转丝杠401固定连接在丝杠电机407的输出轴上,旋转丝杠401转动连接在固定架403上,滑架402螺纹连接在旋转丝杠401上,两个支撑板404分别固定连接在固定架403的左右两端,固定架403上内设有滑槽405,滑架402滑动连接在滑槽405内,两个支撑板404内分别设置有限位槽406,滑架402左右两端分别滑动连接在两个限位槽406内,滑架402上端固定连接有气缸301;启动丝杠电机407,丝杠电机407带动旋转丝杠401转动,丝杠401转动带动滑架402前后移动,滑槽405起到限位和稳固效果,当对禽畜进行喂料时,可根据饲料槽的距离来调节滑架402前后移动,当需要将禽舍换位或搬运时,滑架402先向前移动将禽搬起后再向后移动避免与其他禽舍发生干涉,两个支撑板404起到支撑和稳固作用,防止在搬运禽舍时机器人产生倾倒现象。
35.具体实施方式五:
36.下面结合附图说明本实施方式,本实施方式对实施方式四作进一步说明,所述的一种畜牧养殖用智能自动投料装置还包括驱动轮501、轮架502、滑轨503、转向架504、伸缩弹簧505和扶正轮506,轮架502、滑轨503、转向架504和扶正轮506分别设置有多组,每组分别设置有两个,驱动轮501转动连接在其中两个轮架502内端,两个轮架502内分别设置有两个滑轨503,两个转向架504分别滑动连接在两个滑轨503内,两个伸缩弹簧505其中一端分别固定连接在轮架502上,两个伸缩弹簧505另一端分别固定连接在两个转向架504上,两个扶正轮506分别转动连接在两个转向架504上,位于中间的两个轮架502均固定连接在固定架403的下端,位于两侧的两组轮架502分别固定连接在两个支撑板404的下端;驱动轮501转动带动整个机器人按照轨道开始行走,两个扶正轮506起到稳定机器人作用防止在机器人在转弯或负重时产生晃动,当机器人走到弯道时,两个扶正轮506根据弯道曲线变化带动两个转向架504左右移动,两个伸缩弹簧505利用自身弹力保证两个扶正轮506始终贴在轨道上保持机器人稳定行走。
37.具体实施方式六:
38.下面结合附图说明本实施方式,本实施方式对实施方式五作进一步说明,所述的一种畜牧养殖用智能自动投料装置还包括固定轨道601和扶正槽602,固定轨道601内外两端分别设置有扶正槽602,多个扶正轮506分别与两个扶正槽602接触,驱动轮501与固定轨道601上端接触;环形的固定轨道601具有弯道缓冲区域,机器人在运行时不用进行角度较大的转弯,且两个扶正槽602能够保证机器人在超负重倾斜或出现故障时依然不倒下。
39.具体实施方式七:
40.下面结合附图说明本实施方式,本实施方式对实施方式六作进一步说明,所述的筛料箱107上设有大小均匀的孔;大小均匀的孔能够将饲料和草料等碾压成大小均匀的碎块易于禽畜食用。
41.具体实施方式八:
42.下面结合附图说明本实施方式,本实施方式对实施方式七作进一步说明,所述的
筛料箱107位于出料箱201正上方;筛料箱107即使在不断晃动的情况下也能将饲料排到出料箱201内,方便掉入出料箱201内的饲料向中心的出料口聚集。
43.具体实施方式九:
44.下面结合附图说明本实施方式,本实施方式对实施方式八作进一步说明,所述的驱动轮501上设有电机和抱闸,电机为机器人提供行走动力,抱闸在机器人处于紧急或故障状态时及时停止。
45.具体实施方式十:
46.下面结合附图说明本实施方式,本实施方式对实施方式九作进一步说明,所述的固定轨道601中间位置为放置禽舍位置;环形的固定轨道601中间便于一次排布多个禽舍,以便于机器人绕固定轨道601行走对禽舍进行依次喂食。
47.本发明一种禽畜场自动喂食机器人,其使用原理为:
48.首先向筛料箱107内不断加入饲料和草料混合物,然后启动电机108,电机108转动带动齿轮101转动,齿轮101转动带动齿条架102左右移动,齿条架102左右移动带动碾碎辊103在筛料箱107内滚动,碾碎辊103将饲料和草料进行反复碾压,左后碾碎成细小混合物从筛料箱107掉落,碾碎辊103在反复滚动时通过两个弹簧106带动筛料箱107小幅度晃动防止筛料箱107在下料时产生堵塞造成供料不足,该装置可以根据禽畜的生长期变化通过调节电机108转速来控制饲料研磨的细小程度,研磨好的混合饲料掉入到出料箱201内,此时电机ii203带动摆杆202摆动,对混合饲料开始进行拨动,防止混合饲料站在出料箱201底部,对混和饲料进行进一步搅拌防止饲料在出料口205处堵塞,同时操作人员可以在出料箱201内添加各种禽畜生长所需要的药物与饲料混合在一起便于禽畜食用,两个气缸ii303带动两个搬运架304移动,将两个搬运架304调整到合适距离后,两个搬运架304整体向前移动到禽舍下方后,两个气缸ii303收紧将禽舍夹住最后启动气缸301,启动气缸301带动两个两个搬运架304向上移动即可将禽舍抬起,两个连接杆302起到支撑和限位作用,启动丝杠电机407,丝杠电机407带动旋转丝杠401转动,丝杠401转动带动滑架402前后移动,滑槽405起到限位和稳固效果,当对禽畜进行喂料时,可根据饲料槽的距离来调节滑架402前后移动,当需要将禽舍换位或搬运时,滑架402先向前移动将禽搬起后再向后移动避免与其他禽舍发生干涉,两个支撑板404起到支撑和稳固作用,防止在搬运禽舍时机器人产生倾倒现象,驱动轮501转动带动整个机器人按照轨道开始行走,两个扶正轮506起到稳定机器人作用防止在机器人在转弯或负重时产生晃动,当机器人走到弯道时,两个扶正轮506根据弯道曲线变化带动两个转向架504左右移动,两个伸缩弹簧505利用自身弹力保证两个扶正轮506始终贴在轨道上保持机器人稳定行走,环形的固定轨道601具有弯道缓冲区域,机器人在运行时不用进行角度较大的转弯,且两个扶正槽602能够保证机器人在超负重倾斜或出现故障时依然不倒下。
49.当然,上述说明并非对本发明的限制,本发明也不仅限于上述举例,本技术领域的普通技术人员在发明的实质范围内所做出的变化、改型、添加或替换,也属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1