一种封闭式畜舍用地下刮粪及自动清粪系统的制作方法
1.本发明属于畜牧环境工程技术领域,尤其涉及一种封闭式畜舍用地下刮粪及自动清粪系统。
背景技术:
2.目前,清粪是畜牧业生产管理的一项主要内容,也是粪污综合治理和畜牧环境调控的重要环节之一。当前畜牧业多采用水冲粪、水泡粪和干清粪三种方式进行清粪,水冲粪的劳动强度小,清洁度高,但耗水量巨大,污水产生量高;水泡粪相比水冲粪节约用水量,但易发酵产生有害气体,且粪便在尿液和水中长期浸泡导致营养物质流失,降低粪便资源化利用价值;干清粪有人工干清粪和机械干清粪两种,人工干清粪生产效率低、工作强度大,机械干清粪具有污水产生量少、养分损失小和节省人工等优点,是我国规模畜牧未来清粪技术的重点发展方向。然而,现有利用刮粪板进行刮粪时不能清理干净,同时刮板离地导致将粪便压在地面上,难以清理。
3.通过上述分析,现有技术存在的问题及缺陷为:现有的清粪方法耗水量巨大,污水产生量高,易发酵产生有害气体,人工干清粪生产效率低、工作强度大,机械干清粪刮粪时不能清理干净,同时刮板离地导致将粪便压在地面上,难以清理。
技术实现要素:
4.针对现有技术存在的问题,本发明提供了一种封闭式畜舍用地下刮粪及自动清粪系统。
5.本发明是这样实现的,一种封闭式畜舍用地下刮粪及自动清粪系统,所述封闭式畜舍用地下刮粪及自动清粪系统包括:
6.图像分析模块,与中央控制模块连接,用于基于处理后的图像进行分析判断是否需要刮粪;
7.所述基于处理后的图像进行分析判断是否需要刮粪包括:
8.获取处理后的畜舍图像,利用加权平均法将处理后的畜舍图像转换为灰度图;
9.所述利用加权平均法将处理后的畜舍图像转换为灰度图包括:利用加权平均公式进行图像灰度化处理;
10.所述加权平均公式为:g(i,j)=0.299*r(i,j)+0.578*g(i,j)+0.114*b(i,j)
11.其中:g(i,j)为表示(i,j)的灰度值;r(i,j),g(i,j),b(i,j)分别表示像素(i,j)在r、g、b颜色通道上的像素值;
12.利用局部自适应二值化方法将灰度图进行二值化处理,得到二值化待分析图像;
13.利用基于邻域信息的最大类间方差法对二值化图像进行地面与其他装置的分割;
14.利用图像检测算法进行地面图像中粪便的检测,基于粪便的检测结果判断是否需要刮粪;
15.调节模块,与中央控制模块连接,用于基于测距分析结果进行刮板与地面距离的
调节;
16.刮粪模块,与中央控制模块连接,用于利用紧贴地面双刮板结构进行畜舍刮粪处理;
17.清理结果分析模块,与中央控制模块连接,用于基于采集的畜舍的图像数据判断此次清理是否干净,是否存在结块;
18.结块定位模块,与中央控制模块连接,用于基于采集的图像确定结块所在位置;
19.冲洗模块,与中央控制模块连接,用于当存在结块时,利用洒水器基于确定的结块位置进行定位洒水冲洗。
20.进一步,所述封闭式畜舍用地下刮粪及自动清粪系统还包括:
21.图像采集模块,与中央控制模块连接,用于利用摄像设备采集畜舍内的图像数据;
22.图像处理模块,与中央控制模块连接,用于对采集的畜舍内的图像数据进行处理;
23.中央控制模块,与图像采集模块、图像处理模块、图像分析模块、测距模块、测距分析模块、调节模块、刮粪模块、清理结果分析模块、结块定位模块、冲洗模块连接,用于利用控制器或单片机控制各个模块正常工作;
24.测距模块,与中央控制模块连接,用于利用设置于刮板上的测距传感器测量刮板至地面的距离;
25.测距分析模块,与中央控制模块连接,用于基于测距结果判断刮板是否紧贴地面。
26.进一步,所述图像处理模块对采集的畜舍内的图像数据进行处理包括:
27.获取采集的畜舍内的图像,并将所述采集的畜舍内的图像转换为灰度图像;
28.根据所述灰度图像计算所述采集的畜舍内的图像的亮度分量,获得亮度分量直方图;
29.对所述亮度分量直方图进行裁剪处理,获得所述亮度分量直方图的最大亮度分量值和最小量度分量值;
30.根据所述最大亮度分量值和最小量度分量值以及所述灰度图像的灰度值计算增强对比度后的待识别采集的畜舍内的图像。
31.进一步,所述对亮度分量直方图进行裁剪处理,获得亮度分量直方图的最大亮度分量值和最小量度分量值包括:
32.获取所述采集的畜舍内的图像的分辨率;
33.根据所述分辨率和预设的双边裁剪大小值对所述亮度分量直方图的两端裁剪位置进行计算,获取裁剪参考值;
34.根据所述裁剪参考值裁剪所述亮度分量直方图,获得所述亮度分量直方图的最大亮度分量值和最小量度分量值。
35.进一步,所述测距模块利用设置于刮板上的测距传感器测量刮板至地面的距离包括:
36.对测距传感器进行误差补偿;利用误差补偿的测距传感器发出一定脉冲宽度的检测光;接收至地面的反射光信号;
37.判断是否检测到地面的距离信息;若有,则得到刮板至地面的距离;若没有,则将检测光的脉冲前移或脉冲后移。
38.进一步,所述对测距传感器进行误差补偿包括:
39.用待补偿的测距传感器测试若干个标定点处的距离,得到所述若干个点的实际距离与测试距离,绘制所述若干个点的坐标分布图;
40.依次连接所述若干个点获得曲线,根据所述曲线变化趋势分为若干段,每段的曲线接近线性;
41.依次采集所述测距传感器在各补偿点位置的测试距离,计算所述偏差值,生成所述各补偿点位置的补偿命令,并下发至所述测距传感器;
42.所述测距传感器接收到所述补偿命令后,提取出距离信息,针对所述每段进行线性补偿公式计算;
43.根据所述线性补偿公式计算的值对所述测距传感器进行分段距离补偿。
44.进一步,所述测试距离与所述实际距离的差值为偏差值。
45.进一步,所述图像检测具体过程为:
46.在地面图像中,提取图像中粪便的图像特征,建立训练集;
47.根据粪便特征数据,初步建立分类模型,对检测区域提取网络和目标检测网络做参数初始化;
48.利用完备的数据集对训练数据进行扩充,得到检测区域提取模型和目标检测模型;
49.根据建立的检测区域提取模型和目标检测模型,确定一定比例的窗口在图像中进行滑动,并对对应的区域作图像分类。
50.进一步,所述图像特征提取的具体过程为:
51.对图像进行灰度化处理,并调节图像的对比度,降低图像局部的阴影和光照变化所造成的影响;
52.确定图像中每个像素的梯度,捕获对应的轮廓信息;根据确定的梯度,对图像进行划分,并统计每个小区域的梯度直方图,对每个小区域进行描述;
53.将几个小区域组成一个大区域块,将大区域块中的所有特征串联得到大区域块的描述,即得到图像的特征。
54.进一步,所述局部自适应二值化方法具体过程为:
55.设图像中每一点像素的灰度值为f(x,y),f(x,y)∈{0,1,
…
,255},设阈值为t(0≤t≤255)则:
[0056][0057]
其中,g(x,y)表示二值化后图像中各个像素点的值,若g(x,y)=1表示该点为目标;若g(x,y)=0,表示该点为背景。
[0058]
结合上述的所有技术方案,本发明所具备的优点及积极效果为:本发明封闭式畜舍用地下刮粪及自动清粪系统不仅能够节约水资源,全面彻底的清理畜舍,同时双层刮板能够保证粪便不会被压在地面上,同时利用水针对性处理结块,保证清理的有效性,同时本发明自动化控制清粪能够提高清粪的效率。本发明通过一体化的系统实现了全自动的刮粪、清粪,实现了畜牧业的全自动、无污染清粪。
附图说明
[0059]
为了更清楚地说明本技术实施例的技术方案,下面将对本技术实施例中所需要使用的附图做简单的介绍,显而易见地,下面所描述的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下还可以根据这些附图获得其他的附图。
[0060]
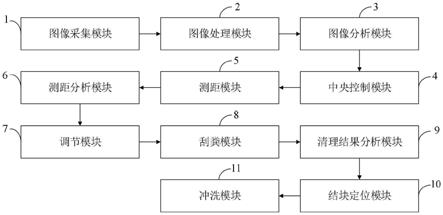
图1是本发明实施例提供的封闭式畜舍用地下刮粪及自动清粪系统的结构示意图;
[0061]
图中:1、图像采集模块;2、图像处理模块;3、图像分析模块;4、中央控制模块;5、测距模块;6、测距分析模块;7、调节模块;8、刮粪模块;9、清理结果分析模块;10、结块定位模块;11、冲洗模块。
[0062]
图2是本发明实施例提供的图像处理模块对采集的畜舍内的图像数据进行处理的方法流程图。
[0063]
图3是本发明实施例提供的对亮度分量直方图进行裁剪处理,获得亮度分量直方图的最大亮度分量值和最小量度分量值的方法流程图。
[0064]
图4是本发明实施例提供的基于处理后的图像进行分析判断是否需要刮粪的方法流程图。
[0065]
图5是本发明实施例提供的测距模块利用设置于刮板上的测距传感器测量刮板至地面的距离的方法流程图。
具体实施方式
[0066]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
[0067]
针对现有技术存在的问题,本发明提供了一种封闭式畜舍用地下刮粪及自动清粪系统,下面结合附图对本发明作详细的描述。
[0068]
如图1所示,本发明实施例提供的封闭式畜舍用地下刮粪及自动清粪系统包括:
[0069]
图像采集模块1,与中央控制模块4连接,用于利用摄像设备采集畜舍内的图像数据;
[0070]
图像处理模块2,与中央控制模块4连接,用于对采集的畜舍内的图像数据进行处理;
[0071]
图像分析模块3,与中央控制模块4连接,用于基于处理后的图像进行分析判断是否需要刮粪;
[0072]
中央控制模块4,与图像采集模块1、图像处理模块2、图像分析模块3、测距模块5、测距分析模块6、调节模块7、刮粪模块8、清理结果分析模块9、结块定位模块10、冲洗模块11连接,用于利用控制器或单片机控制各个模块正常工作;
[0073]
测距模块5,与中央控制模块4连接,用于利用设置于刮板上的测距传感器测量刮板至地面的距离;
[0074]
测距分析模块6,与中央控制模块4连接,用于基于测距结果判断刮板是否紧贴地面;
[0075]
调节模块7,与中央控制模块4连接,用于基于测距分析结果进行刮板与地面距离的调节;
[0076]
刮粪模块8,与中央控制模块4连接,用于利用紧贴地面双刮板结构进行畜舍刮粪处理;
[0077]
清理结果分析模块9,与中央控制模块4连接,用于基于采集的畜舍的图像数据判断此次清理是否干净,是否存在结块;
[0078]
结块定位模块10,与中央控制模块4连接,用于基于采集的图像确定结块所在位置;
[0079]
冲洗模块11,与中央控制模块4连接,用于当存在结块时,利用洒水器基于确定的结块位置进行定位洒水冲洗。
[0080]
如图2所示,本发明实施例提供的图像处理模块对采集的畜舍内的图像数据进行处理包括:
[0081]
s101,获取采集的畜舍内的图像,并将所述采集的畜舍内的图像转换为灰度图像;
[0082]
s102,根据所述灰度图像计算所述采集的畜舍内的图像的亮度分量,获得亮度分量直方图;
[0083]
s103,对所述亮度分量直方图进行裁剪处理,获得所述亮度分量直方图的最大亮度分量值和最小量度分量值;
[0084]
s104,根据所述最大亮度分量值和最小量度分量值以及所述灰度图像的灰度值计算增强对比度后的待识别采集的畜舍内的图像。
[0085]
如图3所示,本发明实施例提供的对亮度分量直方图进行裁剪处理,获得亮度分量直方图的最大亮度分量值和最小量度分量值包括:
[0086]
s201,获取所述采集的畜舍内的图像的分辨率;
[0087]
s202,根据所述分辨率和预设的双边裁剪大小值对所述亮度分量直方图的两端裁剪位置进行计算,获取裁剪参考值;
[0088]
s203,根据所述裁剪参考值裁剪所述亮度分量直方图,获得所述亮度分量直方图的最大亮度分量值和最小量度分量值。
[0089]
如图4所示,本发明实施例提供的基于处理后的图像进行分析判断是否需要刮粪包括:
[0090]
s301,获取处理后的畜舍图像,利用加权平均法将处理后的畜舍图像转换为灰度图;
[0091]
s302,利用局部自适应二值化方法将灰度图进行二值化处理,得到二值化待分析图像;
[0092]
s303,利用基于邻域信息的最大类间方差法对二值化图像进行地面与其他装置的分割;
[0093]
s304,利用图像检测算法进行地面图像中粪便的检测,基于粪便的检测结果判断是否需要刮粪。
[0094]
本发明实施例提供的利用加权平均法将处理后的畜舍图像转换为灰度图包括:利用加权平均公式进行图像灰度化处理;
[0095]
加权平均公式为:g(i,j)=0.299*r(i,j)+0.578*g(i,j)+0.114*b(i,j)
[0096]
其中:g(i,j)为表示(i,j)的灰度值;r(i,j),g(i,j),b(i,j)分别表示像素(i,j)在r、g、b颜色通道上的像素值;
[0097]
如图5所示,本发明实施例提供的测距模块利用设置于刮板上的测距传感器测量刮板至地面的距离包括:
[0098]
s401,对测距传感器进行误差补偿;利用误差补偿的测距传感器发出一定脉冲宽度的检测光;接收至地面的反射光信号;
[0099]
s402,判断是否检测到地面的距离信息;若有,则得到刮板至地面的距离;若没有,则将检测光的脉冲前移或脉冲后移。
[0100]
本发明实施例提供的对测距传感器进行误差补偿包括:
[0101]
用待补偿的测距传感器测试若干个标定点处的距离,得到所述若干个点的实际距离与测试距离,绘制所述若干个点的坐标分布图;
[0102]
依次连接所述若干个点获得曲线,根据所述曲线变化趋势分为若干段,每段的曲线接近线性;
[0103]
依次采集所述测距传感器在各补偿点位置的测试距离,计算所述偏差值,生成所述各补偿点位置的补偿命令,并下发至所述测距传感器;
[0104]
所述测距传感器接收到所述补偿命令后,提取出距离信息,针对所述每段进行线性补偿公式计算;
[0105]
根据所述线性补偿公式计算的值对所述测距传感器进行分段距离补偿。
[0106]
本发明实施例提供的测试距离与所述实际距离的差值为偏差值。
[0107]
本发明实施例提供的图像检测具体过程为:
[0108]
在地面图像中,提取图像中粪便的图像特征,建立训练集;
[0109]
根据粪便特征数据,初步建立分类模型,对检测区域提取网络和目标检测网络做参数初始化;
[0110]
利用完备的数据集对训练数据进行扩充,得到检测区域提取模型和目标检测模型;
[0111]
根据建立的检测区域提取模型和目标检测模型,确定一定比例的窗口在图像中进行滑动,并对对应的区域作图像分类。
[0112]
本发明实施例提供的图像特征提取的具体过程为:
[0113]
对图像进行灰度化处理,并调节图像的对比度,降低图像局部的阴影和光照变化所造成的影响;
[0114]
确定图像中每个像素的梯度,捕获对应的轮廓信息;根据确定的梯度,对图像进行划分,并统计每个小区域的梯度直方图,对每个小区域进行描述;
[0115]
将几个小区域组成一个大区域块,将大区域块中的所有特征串联得到大区域块的描述,即得到图像的特征。
[0116]
本发明实施例提供的局部自适应二值化方法具体过程为:
[0117]
设图像中每一点像素的灰度值为f(x,y),f(x,y)∈{0,1,
…
,255},设阈值为t(0≤t≤255)则:
[0118][0119]
其中,g(x,y)表示二值化后图像中各个像素点的值,若g(x,y)=1表示该点为目标;若g(x,y)=0,表示该点为背景。
[0120]
以上所述,仅为本发明较优的具体的实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1