一种基于路径规划的多自由度花椒枝自动切割装置
1.本发明涉及农业机械领域,具体涉及一种基于路径规划的多自由度花椒枝自动切割装置。
背景技术:
2.花椒是我国重要的调味食材,含有人体所需的维生素c、铜、铁、锌、锰、硒等多种微量元素,中医可入药,对慢性胃炎有显著疗效,深受人们的喜爱。青花椒是重庆市特色产业,种植区域广泛,种植面积达7.30万公顷,年产量约43.5万吨。国内国际现阶段花椒的剪枝和采收基本是人工采摘或手持式机械采摘。人工采摘主要雇佣农民使用传统剪枝剪或气/电动剪刀进行人工剪枝,其中电动花椒采摘器主要通过电机驱动连杆机构进而带动刃口震动,将花椒细枝震断来达到采摘目的,但人工采摘劳动强度大、效率低,还存在花椒刺扎伤的情况,随着农村人口老龄化、劳动力短缺与花椒需求增大的矛盾日益加深,机械化智能剪枝和采收势在必行。
3.青花椒由于生长较快,一般采用二级主枝切断法,在达到采净率和确保不影响原来产量的情况下选择适当位置直接切断,后续配以适当工序处理。专利(一种枪式花椒采摘和剪枝器)为手持辅助式的剪断连接细枝的装置,但无法切断较粗的二级枝条和三级枝条;专利(一种花椒采摘装置及其所构成的花椒视觉采摘机器人)是一种针对花椒果柄剪切的自走式智能花椒采摘机器人,除了切断细枝之外还有负压收集的功能,但适用于红花椒,无法满足青花椒较粗枝干的切断。
4.在农业机器人技术的研究方面,移栽、喷药等方面技术相对成熟,但花椒剪枝与采收还有很大提升空间。结合目前机器视觉和图像处理技术的发展,本发明提出一种基于视觉路径规划的多自由度花椒枝自动切割方式,设计的机构可用于中期花椒枝条修剪,以及收获期的整杆采收。
技术实现要素:
5.本发明要解决的技术问题是提供一种基于路径规划的多自由度花椒枝自动切割装置,方便实现自动扫描椒园路况障碍物等,之后实现避开所有障碍自动路径规划。
6.本发明采用如下技术方案实现发明目的:
7.一种基于路径规划的多自由度花椒枝自动切割装置,包括旋转平台机构、运动提升机构、夹持机构、刀具系统及视图识别处理决策系统,其特征在于:所述旋转平台机构、所述运动提升机构、所述夹持机构、所述刀具系统及所述视图识别处理决策系统均安装在支持底板,底板留有螺孔,可与履带式/轮式智能行走系统组合。
8.作为本技术方案的进一步限定,所述运动提升机构包括丝杆滑块套装一和丝杆滑块套装二,所述丝杆滑块套装一和所述丝杆滑块套装二组成型连接,所述丝杆滑块套装一与所述所述丝杆滑块套装二结构相同。
9.作为本技术方案的进一步限定,所述丝杆滑块套装一包括丝杆螺杆,所述丝杆螺
杆上设置固定螺母,所述固定螺母内设置有钢球,所述螺杆上设置反向器,所述反向器上设置防尘器,所述丝杆滑块套装一还包括对称的挡板,对称的滑块导轨分别通过专用螺母固定连接对应的所述挡板,对称的所述滑块导轨上分别嵌套滑块一,所述运动提升机构还包括步进电机,所述步进电机通过联轴器一连接所述丝杆螺杆,所述丝杆滑块套装一固定连接所述步进电机。
10.作为本技术方案的进一步限定,所述丝杆滑块套装一中对称的所述滑块一分别固定连接丝杆滑块套装二,所述丝杆螺杆螺纹连接所述丝杆滑块套装二,所述运动提升机构还包括电机二,所述丝杆滑块套装二固定连接所述电机二,所述电机二连接轴,所述轴连接齿轮一,所述齿轮一连接传动带,所述传动带连接丝杆所述滑块套装二中丝杆螺杆,所述滑块套装二中所述丝杆螺杆螺纹连接所述夹持机构,所述丝杆滑块套装二中对称的所述滑块一分别固定连接所述夹持机构。
11.作为本技术方案的进一步限定,所述旋转平台机构留有定位螺孔与定位螺槽,所述旋转平台机构通过十字定位螺钉紧密固定连接所述运动提升机构,电机一输入轴与蜗杆相连,所述电机一连接所述旋转平台机构,所述蜗轮杆啮合蜗轮,所述蜗轮固定连接转轴,所述转轴固定连接齿轮二,所述齿轮通过特殊定位孔固定在底板上,所述底板二和所述旋转平台机构通过圆锥滚子轴承一连接,所述旋转平台机构设有机油关注口和防尘外壳。
12.作为本技术方案的进一步限定,所述夹持机构包括直线模组支座、直线导轨及直线轴承,所述直线导轨通过所述直线轴承连接所述直线模组支座,所述夹持机构还包括两个夹持头,两个所述夹持头内壁做包裹加粗橡胶处理,两个所述夹持头尾部分别固定滑块二,两个所述滑块二连接导轨,所述直线导轨嵌套导轨,所述导轨上设置有螺孔通过八角螺钉连接夹持装备支撑平台,一个所述夹持头夹持头下部通过一个圆环钩与弹簧相连,所述弹簧电动推杆相连,另一个所述夹持头带槽推件,所述电动推杆的推杆推头终端触及所述带槽推件。
13.作为本技术方案的进一步限定,所述带槽推件通过螺钉与刀具系统相连,所述刀具系统为带转动链的锯片型刀具,所述锯片型刀具具体结构最上方为高速马达电机,所述带槽推件通过螺钉连接所述高速马达电机,所述高速马达电机通过联轴器与连接轴相连,所述连接轴穿过齿轮片固定连接紧固圆形压片,所述齿轮片与切割链相接,所述切割链通过专用滑沟套在刀具导板上,所述刀具导板上下面各有一压板夹住,所述联轴器通过圆锥滚子轴承连接另一个所述夹持头。
14.作为本技术方案的进一步限定,所述视图识别处理决策系统遍布机器各处,视图识别双目相机侧向悬挂通过相机支架进行支撑并通过信号传输线传回上位机,所述上位机位于悬臂后侧以螺钉牢固固定,所述上位机通过接线控制单片机,所述单片机驱动所述电机、所述电机,全景相机在所述夹持机构下侧固定。
15.作为本技术方案的进一步限定,所述上位机由供电模块和人工智能识别开发板进行终端决策,其主要决策智能行走、花椒切割部位定位以及路径规划,所述智能行走包括距离检测及行走站位。
16.作为本技术方案的进一步限定,所述上位机通过无线模块连接无线遥控器。
17.与现有技术相比,本发明的优点和积极效果是:
18.(1)花椒剪枝/采收作业由微电脑控制,可实现自动扫描椒园路况障碍物等,之后
实现避开所有障碍自动路径规划。
19.(2)当行动系统根据相关命令运动完成运动后,以移动到花椒枝适宜位置,双目摄像机扫描花椒枝型,利用预先训练模型判断采摘切割位置,进行刀具夹持件路径规划,夹持件夹住花椒枝条,夹持件下刀具进刀,切断枝条夹持件继续夹持,将枝条运回收集装置。继续进行下一枝条采摘,直到整株采摘完成。行动系统重复,直至采摘完整片椒园或人为关机。
20.(3)通过在刀具上安装力度传感器,可以实现智能进刀退刀,当反作用力变小可自动退刀,具有减少能源浪费和防卡死的功能。现阶段还未有全自动智能高效省时智能的花椒采摘机械。
21.(4)本发明全部使用电力驱动,并应用机器视觉进行目标定位,基于路径规划方法确定夹持切割系统作业路径,能够代替人力完成花椒枝条的高效自动切割作业,彻底改变了以往人工剪枝、花椒整杆采收时费力、低效、劳动力短缺的情况,同时自动切割装置也可用于其他果园果树剪枝作业。
附图说明
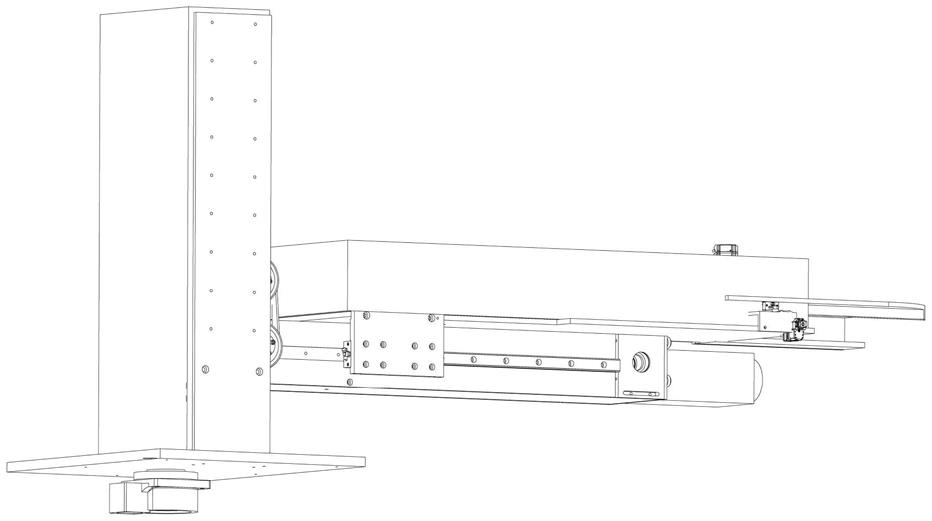
22.图1为本发明的结构示意图一。
23.图2为本发明的结构示意图二。
24.图3为本发明实施例的侧视图。
25.图4为本发明实施例的俯视图。
26.图5为本发明实施例的后侧视图。
27.图6为本发明实施例中夹持切割刀具机构的结构图。
28.图7为本发明实施例中刀具机构的结构图。
29.图8为本发明实施例中旋转平台系统结构示意图。
30.图9为本发明实施例中运动芯片控制电机电路原理图。
31.图10为本发明实施例中工作流程图。
32.图11为本发明各机构具体结合示意图。
33.图中:1、运动提升机构,2、夹持件,201、直线模组支座,202、直线导轨,203、直线轴承,10、丝杆滑块套装一,11、丝杆滑块套装二,12、步进电机,12a、联轴器一,101、丝杆螺杆,13、固定螺母,102、钢球,103、专用螺母,104、反向器,105、防尘器,16、挡板,17、滑块导轨,18、滑块一,12b、联轴器二,19、轴,20、齿轮一,21、传动带,50、旋转平台,501、定位螺孔,502、定位螺槽,51、十字定位螺钉,52、蜗杆,53、蜗轮,54、转轴,55、齿轮二,503、特殊定位孔,56、底板,57、圆锥滚子轴承一,58、机油关注口,59、防尘外壳,70、夹持头,71、包裹加粗橡胶,72、滑块二,73、导轨,74、螺孔,75、八角螺钉,76、夹持装备支撑平台,77、弹簧,78、电动推杆,781、推杆推头,79、带槽推件,80、775高速马达电机,81、锯片型刀具,811、连接轴,82、齿轮片,83、切割链,84、滑沟,85、刀具导板,812、紧固圆形压片,813、压板,86、圆锥滚子轴承二,87、联轴器,150、视图识别双目相机,151a、相机支架,151b、信号传输线,153、上位机,154、单片机,155a、电机一,155b、电机二,156、全景相机,157、无线模块,158、无线遥控器。
具体实施方式
34.下面结合附图,对本发明的一个具体实施方式进行详细描述,但应当理解本发明的保护范围并不受具体实施方式的限制。
35.在本发明创造的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明创造和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明创造的限制。
36.术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以通过具体情况理解上述术语在本发明创造中的具体含义。
37.以下对示例性实施例的描述参照附图。不同图中相同的参考标号标出相同或相似的元件。以下详细描述并不限制本发明。相反,本发明的范围由所附权利要求限定。为了简单起见,以下实施例关于本系统的术语和结构进行说明,然而接下来将要说明的实施例并不局限于此系统,而是可应用于任何可以应用的其它系统。
38.如图1
‑
图11所示,本发明包括旋转平台机构50、运动提升机构1、夹持机构2、刀具系统及视图识别处理决策系统,所述旋转平台机构50、所述运动提升机构1、所述夹持机构2、所述刀具系统及所述视图识别处理决策系统均安装在支持底板,底板留有螺孔,可与履带式/轮式智能行走系统组合。
39.所述运动提升机构1包括丝杆滑块套装一10和丝杆滑块套装二11,所述丝杆滑块套装一10和所述丝杆滑块套装二11组成t型连接,所述丝杆滑块套装一10与所述所述丝杆滑块套装二11结构相同。
40.所述丝杆滑块套装一10包括丝杆螺杆101a,所述丝杆螺杆101a上设置固定螺母13,所述固定螺母13内设置有钢球102,所述螺杆101a上设置反向器104,所述反向器104上设置防尘器105,所述丝杆滑块套装一10还包括对称的挡板16,对称的滑块导轨17分别通过专用螺母103固定连接对应的所述挡板16,对称的所述滑块导轨17上分别嵌套滑块一18,所述运动提升机构1还包括步进电机12,所述步进电机12通过联轴器一12a连接所述丝杆螺杆101,所述丝杆滑块套装一10固定连接所述步进电机12。
41.所述丝杆滑块套装一10中对称的所述滑块一18分别固定连接丝杆滑块套装二11,所述丝杆螺杆101a螺纹连接所述丝杆滑块套装二11,所述运动提升机构1还包括电机二155b,所述丝杆滑块套装二11固定连接所述电机二155b,所述电机二155b连接轴19,所述轴19连接齿轮一20,所述齿轮一20连接传动带21,所述传动带21连接丝杆所述滑块套装二11中丝杆螺杆101,所述滑块套装二11中所述丝杆螺杆101螺纹连接所述夹持机构2,所述丝杆滑块套装二11中对称的所述滑块一18分别固定连接所述夹持机构2。
42.所述旋转平台机构50留有定位螺孔501与定位螺槽502,所述旋转平台机构50通过十字定位螺钉51紧密固定连接所述运动提升机构1,电机一155a输入轴与蜗杆52相连,所述电机一155a连接所述旋转平台机构50,所述蜗轮杆52啮合蜗轮53,所述蜗轮53固定连接转轴54,所述转轴54固定连接齿轮二55,所述齿轮55通过特殊定位孔503固定在底板56上,所
述底板二56和所述旋转平台机构50通过圆锥滚子轴承一57连接,所述旋转平台机构50设有机油关注口58和防尘外壳59,所述电机。
43.所述夹持机构2包括直线模组支座201、直线导轨202及直线轴承203,所述直线导轨202通过所述直线轴承203连接所述直线模组支座201,所述夹持机构2还包括两个夹持头70,两个所述夹持头70内壁做包裹加粗橡胶71处理,两个所述夹持头70尾部分别固定滑块二72,两个所述滑块二72连接导轨73,所述直线导轨202嵌套导轨73,所述导轨73上设置有螺孔74通过八角螺钉75连接夹持装备支撑平台76,一个所述夹持头70夹持头下部通过一个圆环钩与弹簧77相连,所述弹簧77电动推杆78相连,另一个所述夹持头70带槽推件79,所述电动推杆78的推杆推头781终端触及所述带槽推件79。
44.所述带槽推件79通过螺钉与刀具系统相连,所述刀具系统为带转动链的锯片型刀具81,所述锯片型刀具81具体结构最上方为775高速马达电机80,所述带槽推件79通过螺钉连接所述775高速马达电机80,所述775高速马达电机80通过联轴器87与连接轴811相连,所述连接轴811穿过齿轮片82固定连接紧固圆形压片812,所述齿轮片82与切割链83相接,所述切割链83通过专用滑沟84套在刀具导板85上,所述刀具导板85上下面各有一压板813夹住,所述联轴器87通过圆锥滚子轴承86连接另一个所述夹持头70。
45.所述视图识别处理决策系统遍布机器各处,视图识别双目相机150侧向悬挂通过相机支架151a进行支撑并通过信号传输线151b传回上位机153,所述上位机153位于悬臂后侧以螺钉牢固固定,所述上位机153通过接线控制单片机154,所述单片机154驱动所述电机155a、所述电机155b,全景相机156在所述夹持机构2下侧固定。
46.所述上位机由供电模块和人工智能识别开发板进行终端决策,其主要决策智能行走、花椒切割部位定位以及路径规划,所述智能行走包括距离检测及行走站位。
47.所述双目相机150用于进行局部扫描与识别。
48.采摘控制系统包括视觉识别定位系统(上述双目相机以进行定位)和采摘执行控制模块,视觉识别定位系统分别与双目相机测距传感器连接,所述双目相机用于进行局部扫描与识别,所述测距传感器用于待采摘花椒位置测距,得到以上信息之后,建立专门的目标训练数据集,采用基于yolov4卷积神经网络的目标检测方法对数据集进行训练和测试。利用图像采集系统采集的花椒图像和花椒枝条分布模型,利用双目视觉系统相机的标定参数和双目视觉三维重建的方法初步获取花椒果实的初始空间位置及枝干位置,加上已有机械视觉的前期训练,从而识别出正确的切割位置。处理芯片进行逻辑运算,进行道具路径规划输出相应指令控制夹持机构和刀具进行工作。
49.所述视觉识别定位系统计算出规划行走路径并传输至行走执行控制模块(可模块化适配大部分行走系统)。
50.行走执行控制模块与行走系统连接,所扫描到的具体信息(双目或全景)通过信号传输线传回工控上位机。
51.所述上位机156通过无线模块157连接无线遥控器158。
52.本发明的工作流程为:
53.(1)开机启动:
54.开机之后,通过无线智能显示进行人机交互,基于路径规划的多自由度花椒枝自动切割装置首先进入自检程序。利用手动控制先将机器移到花椒园中,再启动智能采摘,全
景摄像头156先行扫描椒园情况(障碍物,花椒树距离位置等),中心处理芯片进行路径规划等,发出指令控制行走系统电机旋转,控制左右履带差速转向,进行避障等,运动到花椒树前合适位置。
55.(2)正常工作:
56.装置已经自行运动到花椒树前,双目相机150通电,悬臂侧面双目相机150扫描花椒树形,利用提前标定好的模型和建立的经验方程,判定切割和夹持位置。工控机处理器发出相应数据指令,通过驱动板转化为步进电机12步数,电机二155b、电机一155a转动,以使夹持件到达相应位置。然后电动推杆78通电,花椒夹持件夹住花椒枝,进刀切割切断之后,中央处理器继续发出指令,和上述三电机运动形式相同,夹住切断花椒枝放回提前设计好的收纳容器。旋转伸缩等系统继续运动夹持切割,直至将整株花椒采收干净。行动系统继续运动刀下一花椒株前,循环往复上述运动。
57.(3)停机关闭:
58.通过无线智能控制显示进行人机交互进行停机关闭,中央处理器自有一套已经提前设定的程序,输出设置好的指令,将运动系统进行机器归零,行动系统连接gps导航系统,自动走回设置的停靠点,最后停机断电。
59.本实例减轻了椒农劳动强度,提高椒园经济效益,它的结构简单并且全自动化,椒农易操作控制,它能实现模块化组装,且造价成本低廉,易实现批量生产。该机械臂式花椒采收机能全自动对花椒进行采摘作业,可广泛应用推广。
60.整篇说明书中所提到的“一个实施例”或“实施例”意味着结合实施例所述的具体特征、结构或特性包括在所公开的主题的至少一个实施例中。因而,在整篇说明书中各处出现的用语“在一个实施例中”或“在实施例中”不一定指同一实施例。此外,可采取任何合适的方式将具体特征、结构或特性结合在一个或多个实施例中。应当理解的是,本说明书并非意图限制本发明。相反,示例性实施例意图涵盖备选方案、改型方案和等同方案,它们包括在如由所附权利要求所限定的本发明的精神和范围内。此外,在示例性实施例的详细描述中,阐述了许多具体细节以提供对主张权利的发明的综合理解。然而,本领域技术人员应该理解的是,各种实施例也可在不具备这些具体细节的情况下予以实施。
61.虽然以特别的结合在实施例中描述了这些示例性实施例的特征和元件,但各特征和元件均可在不具备实施例的其它特征和元件的情况下单独使用,或与本文所公开的其它特征和元件相结合或不结合地使用。
62.此书面描述使用了包括最佳模式在内的实例来公开本发明,并且还使本领域的任何技术人员能够实施本发明,包括制作和利用任何装置或系统以及执行任何所结合的方法。本发明可取得专利权的范围通过权利要求来限定,并且可包括本领域技术人员所想到的其它实例。如果此类其它实例具有与权利要求的文字语言并无不同的结构元件,或者它们包括与权利要求的文字语言中所记载的结构元件等同的结构元件,则认为此类其它实例包含在权利要求的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1