马铃薯雄蕊采集器及其使用方法与流程
1.本发明属于农业器械技术领域,具体涉及一种马铃薯雄蕊采集器及其使用方法。
背景技术:
2.马铃薯为自花授粉作物,天然杂交率一般不超过0.5%。在耕种过程中通常以薯块作为种子,长期以往造成马铃薯品种退化严重,以往抗病抗旱品种优势不再显著,产量也随着种植年限的增加开始下降。然而马铃薯杂交育种作为一种重要的品种改良手段,通常需要以下几步:去雄、采集花粉和授粉杂交。目前,常用的去雄方法是,工作人员手持镊子或剪刀,并额外携带容器或收集袋,先将马铃薯雄蕊采集下来,然后再放入单独容器或收集袋中收集储存,这样的弊端是,分步动作,先采集、再放置收集,步骤繁琐,操作不便,效率较低。所以需要一种能够高效去除并且能快速收集镊子上剪下来雄蕊的装置。
技术实现要素:
3.为了解决上述现有技术中存在的问题,提供了一种马铃薯雄蕊采集器及其使用方法。
4.本发明解决其技术问题所采用的技术方案是:
5.本技术方案提出了一种马铃薯雄蕊采集器,包括镊子主体,所述镊子主体包括两个臂杆,两个臂杆的一端分别连接有夹持杆,两个臂杆的另一端分别连接有镊头,两个所述镊头安装有用于切断雄蕊的切刀;两个夹持杆的另一端通过销轴铰接在一起,形成v字型结构;所述夹持杆之间还设置有复位弹簧;所述臂杆的表面设置有防滑垫;还包括用于盛装雄蕊的收集袋,所述收集袋设置在所述臂杆的下方;所述收集袋连接有带动所述收集袋进行往复移动的驱动机构,所述驱动机构包括气囊,所述气囊与所述夹持杆相连;两个所述臂杆的内部均开设有滑腔,所述气囊通过两根气管分别与两个滑腔相连通;所述滑腔中活动设置有推杆,所述推杆的一端连接有活塞,所述活塞与所述滑腔内壁滑动连接;所述滑腔内壁上设置有用于对所述活塞进行限位的挡台;所述推杆的另一端连接有固定杆,所述臂杆开设有滑槽,所述固定杆的另一端自由穿过该滑槽与所述收集袋相连。
6.所述滑腔中还活动设置有延伸杆,所述推杆的内部开设有贯通的通腔,所述通腔中滑动连接有所述延伸杆,所述延伸杆的一端自由穿过推杆的端部延伸至所述滑腔中;所述延伸杆的另一端连接有密封塞,所述密封塞与所述通腔内壁滑动连接;活塞中心开设有贯通的阶梯孔,所述阶梯孔中形成有挡肩,用以对所述密封塞进行限位;所述固定杆与所述延伸杆的一端相连。
7.所述阶梯孔中设置有拉簧;所述拉簧的一端与所述活塞内壁相连,另一端与所述密封塞相连。
8.每一个所述镊头上还连接有呈弧形的壳体;两个壳体对称设置;当两个切刀对合切断雄蕊后,两个壳体相对合形成筒体状结构。
9.所述固定杆的端部设置有挂钩,所述收集袋可拆卸挂设于所述挂钩上。
10.所述复位弹簧为压簧或扭力弹簧。
11.本发明还提出了一种马铃薯雄蕊采集器的使用方法,采用所述马铃薯雄蕊采集器,包括如下步骤:
12.步骤一:将收集袋挂接到固定杆上,手持着镊子主体,拇指与食指分别放到两根臂杆的防滑垫上,使后端的气囊正好处在手心内;
13.步骤二:拇指与食指进行用力,使镊子主体闭合,两个切刀向相互靠近的方向移动,对雄蕊进行切断;在切刀移动过程中,两个壳体也相互靠拢,形成筒体状结构,防止切割下来的雄蕊从镊头上掉落;
14.步骤三:雄蕊切断后,保持镊子主体继续处于捏紧状态,雄蕊处在收集筒内,此时手心用力,对气囊进行挤压;通过手心的挤压,气囊中的气体进入到滑腔中,推动推杆在滑腔内向镊头方向滑动,推杆就会带动固定杆移动,进而带动收集袋向前滑动,使收集袋处在镊头下方,此时拇指与食指松开镊子,雄蕊就会掉落到收集袋内被收集;
15.步骤四:当收集完成后,手心不再用力,松开气囊,气囊在复位过程中,推杆就会带动收集袋恢复原位,使收集袋处于臂杆中后方,干扰不到前端雄蕊的采集。
16.所述步骤三中还包括延伸杆的联动,具体过程如下:气囊中的气体进入到滑腔中后,推动推杆在滑腔内向镊头方向滑动同时也推动延伸杆沿着通腔朝向镊头移动;当活塞移动至挡台处时,推杆不再移动。
17.所述步骤四中还包括延伸杆的复位,具体过程如下:当收集完成后,手心不再用力,松开气囊,气囊在复位过程中,推杆就会向靠近气囊的方向移动,同时,在拉簧的拉力作用下,延伸杆也相对推杆形成收缩,最终实现收集袋的复位。
18.与现有技术相比,本发明具有以下优点:
19.1.本装置在镊子主体上设置有收集袋,形成了自带收集袋的镊子主体,这样就无需再额外携带收集雄蕊的容器了;并且镊子主体上还设置有带动所述收集袋进行往复移动的驱动机构;在初始状态时,收集袋设置在臂杆的中后部,当按压镊子时,先将雄蕊切断,然后再用手心挤压驱动机构中的气囊,可通过推杆的作用,实现收集袋朝向镊头方向移动,以便承接切断下来的雄蕊;当松开镊子主体后,雄蕊掉落至收集袋中,然后手心也松开不再挤压气囊,这样收集袋就可恢复至原位,防止干扰前端雄蕊的采集工作。整个装置结构简单、设计巧妙合理,无复杂机械结构,单手就可操作,利用食指、拇指以及手心的配合就可完成雄蕊的采集,非常方便和实用。
20.2.本装置在镊头上设置有呈弧形的壳体,两个壳体对称设置;当两个切刀对合切断雄蕊后,两个壳体相对合形成筒体状结构,可防止切下来的雄蕊从镊头上掉落,以免无法准确掉落至收集袋中,起到保护和导向作用。
21.3.通过设置推杆和延伸杆,推杆与延伸杆组成伸缩杆状结构,可实现收集袋的大距离调整,扩大了的收集袋的移动范围,这样初始状态时,收集袋可尽量设置在靠近臂杆中后端的位置,防止收集袋影响前端镊头的夹断工作,保证各动作的有序进行。
附图说明
22.本发明的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解,其中:
23.图1是本发明其中一种实施例结构示意图(初始状态)。
24.图2是本发明其中一种实施例结构示意图(气囊挤压状态)。
25.图3是图1中本发明结构主视图。
26.图4是推杆及活塞结构局部放大图。
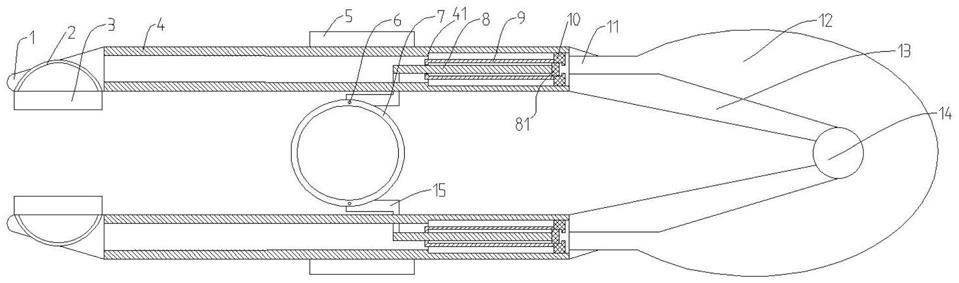
27.图5是本发明另一实施例结构示意图(初始状态)。
28.图6是本发明另一实施例结构示意图(气囊挤压状态)。
29.图7是压簧结构示意图。
30.附图标记说明:
31.1镊头;2壳体;3切刀;4臂杆;41挡台;5防滑垫;6挂钩;7收集袋;8延伸杆;81密封塞;9推杆;10活塞;11气管;12气囊;13夹持杆;14销轴;15固定杆;16拉簧;17压簧。
具体实施方式
32.下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本发明,而不能理解为对本发明的限制。
33.实施例一
34.如图1
‑
4所示,本实施例提出了一种马铃薯雄蕊采集器,包括镊子主体,镊子主体包括两个臂杆4,两个臂杆4的一端分别连接有夹持杆13,两个臂杆4的另一端分别连接有镊头1,两个镊头1安装有用于切断雄蕊的切刀3;两个夹持杆13的另一端通过销轴14铰接在一起,形成v字型结构;夹持杆13之间还设置有复位弹簧,复位弹簧可以采用两种形式的弹簧,一种是压簧17,如图7所示,压簧17设置与两个臂杆4之间,压簧17的两端分别与两个臂杆4相连;另一种采用扭力弹簧的形式,扭力弹簧可套设在销轴14上。
35.为了方便工作人员操作,臂杆4的表面设置有防滑垫5,增大摩擦力。
36.还包括用于盛装雄蕊的收集袋7,收集袋7设置在臂杆4的下方;收集袋7连接有带动收集袋7进行往复移动的驱动机构,其中:
37.驱动机构包括气囊12,气囊12与夹持杆13相连,气囊12贴附在夹持杆13上,气囊12连通有两根气管11,气囊12采用弹性橡胶材质制作,按压后,可自动恢复;两个臂杆4的内部均开设有滑腔,气囊12通过两根气管11分别与两个滑腔相连通;气囊12中的气体可经气管11进入滑腔;滑腔中活动设置有推杆9,推杆9可沿着滑腔左右移动;推杆9的一端连接有活塞10,活塞10与滑腔内壁滑动连接,活塞10可起到密封作用;滑腔内壁上设置有用于对活塞10进行限位的挡台41,当活塞10移动至该挡台41处时,被挡住无法再继续前移,起到定位作用;推杆9的另一端可直接连接有固定杆15,臂杆4开设有滑槽(未示出),滑槽沿着滑腔长度方向开设,滑槽与滑腔相连通,固定杆15的另一端自由穿过该滑槽与收集袋7相连,固定杆15可沿着滑腔左右移动,进而带动收集袋7左右移动。
38.每一个镊头1上还连接有呈弧形的壳体2;两个壳体2对称设置;当两个切刀3对合切断雄蕊后,两个壳体2相对合形成筒体状结构,可防止切下来的雄蕊从镊头1上掉落,以免无法准确掉落至收集袋7中,起到保护和导向作用。
39.固定杆15的端部设置有挂钩6,收集袋7可拆卸挂设于挂钩6上,挂钩6的设置方便收集袋7挂设和拆卸。收集袋7可采用柔性材质制成。
40.本实施例还提出了一种马铃薯雄蕊采集器的使用方法,采用本实施例中的马铃薯雄蕊采集器,包括如下步骤:
41.步骤一:将收集袋7挂接到固定杆15上,手持着镊子主体,拇指与食指分别放到两根臂杆4的防滑垫5上,使后端的气囊12正好处在手心内;
42.步骤二:拇指与食指进行用力,使镊子主体闭合,两个切刀3向相互靠近的方向移动,对雄蕊进行切断;在切刀3移动过程中,两个壳体2也相互靠拢,形成筒体状结构,防止切割下来的雄蕊从镊头1上掉落;
43.步骤四:雄蕊切断后,保持镊子主体继续处于捏紧状态,雄蕊处在收集筒内,此时手心用力,对气囊12进行挤压;通过手心的挤压,气囊12中的气体进入到滑腔中,推动推杆9在滑腔内向镊头1方向滑动,推杆9就会带动固定杆15移动,进而带动收集袋7向前滑动,使收集袋7处在镊头1下方,此时拇指与食指松开镊子,雄蕊就会掉落到收集袋7内被收集;
44.步骤三:当收集完成后,手心不再用力,松开气囊12,气囊12在复位过程中,推杆9就会带动收集袋7恢复原位,使收集袋7处于臂杆4中后方,干扰不到前端雄蕊的采集。
45.由此可以看出,本装置在镊子主体上设置有收集袋7,形成了自带收集袋7的镊子主体,这样就无需再额外携带收集雄蕊的容器了;并且镊子主体上还设置有带动所述收集袋7进行往复移动的驱动机构;在初始状态时,收集袋7设置在臂杆4的中后部,当按压镊子时,先将雄蕊切断,然后再用手心挤压驱动机构中的气囊12,可通过推杆9的作用,实现收集袋7朝向镊头1方向移动,以便承接切断下来的雄蕊;当松开镊子主体后,雄蕊掉落至收集袋7中,然后手心也松开不再挤压气囊12,这样收集袋7就可恢复至原位,防止干扰前端雄蕊的采集工作。整个装置结构简单、设计巧妙合理,无复杂机械结构,单手就可操作,利用食指、拇指以及手心的配合就可完成雄蕊的采集,非常方便和实用。
46.实施例二
47.参考附图1
‑
6,本实施例提出了一种马铃薯雄蕊采集器,其它结构同实施一相同,不同之处在于,滑腔中还活动设置有延伸杆,推杆9的内部开设有贯通的通腔,通腔中滑动连接有延伸杆,延伸杆的一端自由穿过推杆9的端部延伸至滑腔中;延伸杆的另一端连接有密封塞,密封塞与通腔内壁滑动连接;活塞10中心开设有贯通的阶梯孔,阶梯孔中形成有挡肩,用以对所述密封塞进行限位;在本实施例中,固定杆15与延伸杆的一端相连,不直接与推杆9相连。
48.通过设置推杆9和延伸杆,推杆9与延伸杆组成伸缩杆状结构,可实现收集袋7的大距离调整,扩大了的收集袋7的移动范围,这样初始状态时,收集袋7可尽量设置在靠近臂杆4中后端的位置,防止收集袋7影响前端镊头1的夹断工作,保证各动作的有序进行。
49.实施例三
50.继续参考附图5
‑
6,在实施例二的基础上,阶梯孔中设置有拉簧;拉簧的一端与活塞10内壁相连,另一端与密封塞相连。拉簧的设置可保证延伸杆能够更好的复位。
51.本实施例还提出了一种马铃薯雄蕊采集器的使用方法,采用本实施例中的马铃薯雄蕊采集器,包括如下步骤:
52.步骤一:将收集袋7挂接到固定杆15上,手持着镊子主体,拇指与食指分别放到两根臂杆4的防滑垫5上,使后端的气囊12正好处在手心内;
53.步骤二:拇指与食指进行用力,使镊子主体闭合,两个切刀3向相互靠近的方向移
动,对雄蕊进行切断;在切刀3移动过程中,两个壳体2也相互靠拢,形成筒体状结构,防止切割下来的雄蕊从镊头1上掉落;
54.步骤三:雄蕊切断后,保持镊子主体继续处于捏紧状态,雄蕊处在收集筒内,此时手心用力,对气囊12进行挤压;通过手心的挤压,气囊12中的气体进入到滑腔中,推动推杆9在滑腔内向镊头1方向滑动,同时也推动延伸杆沿着通腔朝向镊头1移动,此时,拉簧产生弹力;当活塞10移动至挡台41处时,推杆9不再移动;延伸杆就会带动固定杆15移动,进而带动收集袋7向前滑动,使收集袋7处在镊头1下方,此时拇指与食指松开镊子,雄蕊就会掉落到收集袋7内被收集;
55.步骤四:当收集完成后,手心不再用力,松开气囊12,气囊12在复位过程中,推杆9就会向靠近气囊12的方向移动,同时,在拉簧的拉力作用下,延伸杆也相对推杆9形成收缩,最终使收集袋7处于臂杆4中后方,干扰不到前端雄蕊的采集。
56.尽管已经示出和描述了本发明的实施例,本领域的普通技术人员可以理解:在不脱离本发明的原理和宗旨的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1