一种槟榔自动采摘机
1.本发明涉及槟榔采摘技术领域,具体是一种槟榔自动采摘机。
背景技术:
2.槟榔果采摘是农业生产中的一个环节,其具有劳动强度大、作业要求高,季节性强和时令性的特点。传统的采摘方式靠人工利用工具或徒手爬树进行采摘,不仅效率低、劳动量大,还存在一定的危险性。
3.专利号为cn202010746564.5的一种攀爬式槟榔采摘机,包括机架、攀爬机构、伸缩组件、夹紧件、采摘机构和收纳部件,攀爬机构设置在机架上,伸缩组件的固定端设置在机架上,伸缩端连接夹紧件,夹紧件与攀爬机构之间形成穿过树干的通道,攀爬机构与树干接触并驱动机架沿树干上下移动,伸缩组件用于调节夹紧件与攀爬机构的距离,采摘机构包括设于机架的环形轨道和沿环形轨道转动的用于切割槟榔的切割装置,切割装置下方设有承接掉落槟榔的收纳部件,压力传感器与控制系统信号连接,控制系统根据检测的树干压力大小控制伸缩组件伸长或缩短。能够适应不同直径的树干,当爬到树干上部时不会因为树干直径变小而掉落,也不会因为树干直径过大而夹伤树干;采用上述采摘机在槟榔园进行批量采摘时,需要不断采摘机不断爬山爬下,再通过人工移动来将安装于下一棵槟榔树上,采摘机不能在槟榔树之间跨越,大大降低了槟榔采摘机的安装效率,提高了人工劳动力成本。
技术实现要素:
4.本发明提供了一种槟榔自动采摘机,旨在解决上述槟榔采摘机不能在槟榔树之间跨越的问题。
5.为实现上述目的,本发明提供一种槟榔自动采摘机,包括支板、机架、行走机构、压紧机构、跨越机构、水平旋转机构以及切割机构;所述机架开闭设于所述支板上;所述行走机构倾斜设于所述机架内一侧,所述压紧机构倾斜设于所述机架内另一侧;所述跨越机构连接于所述支板之间;所述水平旋转机构设于所述支板上并与所述机架传动连接;所述切割机构设于所述机架上端;所述支板上设有用于对所述跨越机构锁紧的弹性锁,以使所述机架能够水平移动进行跨越。
6.进一步地,所述机架包括上机架和下机架,所述支板包括上支板和下支板,所述上机架转动设于所述上支板上,所述下机架转动设于所述下支板上;所述跨越机构铰接于所述上支板和所述下支板上。
7.进一步地,所述水平旋转机构包括水平旋转电机和齿盘,所述水平旋转电机设于所述支板上,所述齿盘转动设于所述支板上,所述水平旋转电机的输出端通过齿轮与所述齿盘传动连接。
8.进一步地,所述行走机构包括发动机和行走爬升轮,所述发动机设于所述框架的一侧,所述行走爬升轮通过支架设于所述框架内一侧并与所述发动机传动连接。
9.进一步地,所述压紧机构包括第一电动推杆、压紧支架、第一弹簧以及压紧轮,所述第一电动推杆设于所述机架的一侧;所述第一电动推杆的输出端连接有限位板,所述压紧轮转动设于所述压紧支架上,所述压紧支架通过限位杆与所述限位板滑动连接,所述第一弹簧套于所述限位杆上并位于所述压紧支架和所述限位板之间。
10.进一步地,所述上机架和所述下机架均包括转板、支杆、第一框架、第二框架以及机架电机,所述转板连接于所述支杆上端,所述支杆与所述支板转动连接,所述支杆通过l形杆与所述齿盘连接;所述第一框架和所述第二框架通过第一转轴转动连接于所述转板和所述齿盘上;所述机架电机设于所述转板上并与任一所述第一转轴传动连接;所述第一框架和所述第二框架的一端通过磁性锁连接。
11.进一步地,所述跨越机构包括转杆﹑平行杆﹑第一棘轮﹑第二棘轮以及驱动电机,所述转杆的两端通过轴杆转动连接于所述上支板和所述下支板上;所述平行杆的两端交接于所述上支板和所述下支板上并与所述转杆平行;所述轴杆包括上轴杆和下轴杆;所述第一棘轮和所述第二棘轮间隔设于所述下轴杆上;所述驱动电机设于所述下支板上,所述下轴杆的一端设有从动锥齿轮,所述下支板上通过转管设有主动锥齿轮,所述从动锥齿轮与所述主动锥齿轮啮合;所述转管内转动连接有第二转轴,所述第二转轴通过齿轮与所述驱动电机传动连接。
12.进一步地,所述弹性锁包括连接于所述上轴杆上的锁盘﹑连接盘﹑弹性盘以及第二电动推杆,所述连接盘固定设于所述第二电动推杆的输出端;所述锁盘上沿周向设有多个锁孔,所述连接盘上沿周向滑动设有多根锁杆,所述弹性盘连接于所述锁杆的端部,所述锁杆位于所述连接盘和所述弹性盘之间套有第二弹簧。
13.进一步地,所述切割机构包括第三电动推杆和采摘刀头,所述第三电动推杆设于所述机架上,所述采摘刀头设于所述第三电动推杆的输出端。
14.进一步地,所述第二转轴位于所述下支板内设有转齿,所述转齿两端传动连接有齿条,所述下支板上设有与所述第一棘轮和所述第二棘轮配合的第一棘爪和第二棘爪,所述第一棘爪和所述第二棘爪分别与所述齿条连接;所述第二转轴端部设有条形凸起,所述转管内设有半圆槽,所述条形凸起位于所述半圆槽内,所述第二转轴通过转动与所述半圆槽端部抵接来带动所述转管转动;所述齿条的一端设有弹性齿,以使所述转齿通过正反转来切换驱动所述转齿两侧齿条进行直线运动。
15.相对现有技术,具有以下有益效果:
16.1.通过在支板上设置双机架,并依靠设置于支板上的跨越机构来水平移动上机架夹紧下一棵槟榔树,以使采摘装置通过上机架来作为支点使跨越机构驱动下机构水平移动至下一棵槟榔树来实现采摘装置的跨越,有效提高了槟榔采摘过程中采摘装置的安装效率,进一步提高槟榔采摘效率,大大降低了人工劳动力。
17.2.通过设置上机架和下机架,并结合水平旋转机构和跨越机构,以下机架作为支点,通过行走机构和压紧机构来绕一棵槟榔树转动对多棵槟榔树进行槟榔采摘,进一步提高槟榔采摘效率。
附图说明
18.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使
用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的优选实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
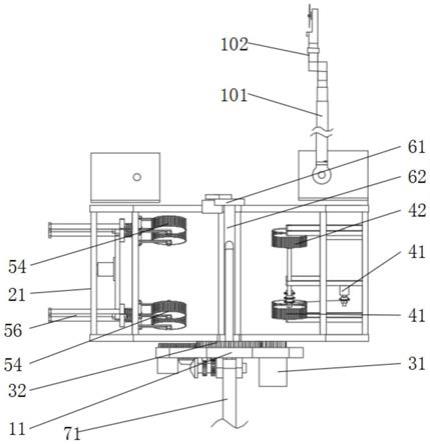
19.图1为本技术一种槟榔自动采摘机的示意图;
20.图2为本技术一种槟榔自动采摘机的机架和跨越机构示意图;
21.图3为本技术一种槟榔自动采摘机的a局部放大示意图;
22.图4为本技术一种槟榔自动采摘机的b局部放大示意图;
23.图5为本技术一种槟榔自动采摘机的支板位置示意图;
24.图6为本技术一种槟榔自动采摘机的机架和跨越机构轴视图;
25.图7为本技术一种槟榔自动采摘机的c局部放大示意图;
26.图8为本技术一种槟榔自动采摘机的上机架示意图;
27.图9为本技术一种槟榔自动采摘机的行走机构和压紧机构示意图;
28.图10为本技术一种槟榔自动采摘机的驱动电机与下轴杆的传动示意图;
29.图11为本技术一种槟榔自动采摘机的齿条与转齿配合示意图;
30.图12为本技术一种槟榔自动采摘机的齿条示意图。
31.附图标记:1
‑
支板;2
‑
机架;3
‑
上轴杆;4
‑
下轴杆;11
‑
上支板;12
‑
下支板;21
‑
上机架;22
‑
下机架;31
‑
水平旋转电机;32
‑
齿盘;41
‑
发动机;42
‑
行走爬升轮;43
‑
支架;51
‑
第一电动推杆;52
‑
压紧支架;53
‑
第一弹簧;54
‑
压紧轮;55
‑
限位板;56
‑
限位杆;61
‑
转板;62
‑
支杆;63
‑
第一框架;64
‑
第二框架;65
‑
机架电机;66
‑
l形杆;67
‑
磁性锁;68
‑
第一转轴;71
‑
转杆;72
‑
平行杆;73
‑
第一棘轮;74
‑
第二棘轮;75
‑
驱动电机;76
‑
第一棘爪;77
‑
第二棘爪;78
‑
齿条;81
‑
从动锥齿轮;82
‑
转管;83
‑
主动锥齿轮;84
‑
第二转轴;85
‑
转齿;91
‑
锁盘;92
‑
连接盘;93
‑
弹性盘;94
‑
第二电动推杆;95
‑
锁杆;96
‑
第二弹簧;101
‑
第三电动推杆;102
‑
采摘刀头;781
‑
弹性齿;821
‑
半圆槽;841
‑
条形凸起;911
‑
锁孔。
具体实施方式
32.为了更易理解本发明的结构及所能达成的功能特征和优点,下文将本发明的较佳的实施例,并配合图式做详细说明如下:
33.实施例1:
34.如图1至图11所示,本发明提供了一种槟榔自动采摘机,包括支板1、机架2、行走机构、压紧机构、跨越机构、水平旋转机构以及切割机构;机架2开闭设于支板1上,机架2为两组,以通过两组机架2来实现支点跨越;机架2为多边形结构,可以为六边形结构;行走机构倾斜设于机架2内一侧,压紧机构倾斜设于机架2内另一侧,以使机架2在行走机构的驱动下螺旋爬升;跨越机构连接于支板1之间,以使机架2能够进行水平移动;水平旋转机构设于支板1上并与机架2传动连接,以便于调节机架2的水平旋转角度;切割机构设于机架2上端;支板1上设有用于对调节角度后的跨越机构锁紧的弹性锁,以使机架2能够水平移动进行跨越,通过弹性锁结合跨越机构来实现对机架2的水平移动跨越。
35.具体地,机架2包括上机架21和下机架22,支板1包括上支板11和下支板12,上机架21转动设于上支板11上,下机架22转动设于下支板12上;跨越机构铰接于上支板11和下支板12上,以通过设置上机架21和下机架22来实现跨越过程中以任一机架2作为支点来进行
跨越,还可以以任一机架2夹紧槟榔树来对周围多棵槟榔树进行槟榔采摘,大大提高了槟榔采摘的效率,且简化了槟榔采摘过程中需要频繁安装和拆卸采摘机的步骤,大大降低了人工劳动力成本。
36.实施例2:
37.如图1和图8所示,结合实施例1的技术方案,本实施例中,上机架21和下机架22均包括转板61、支杆62、第一框架63、第二框架64以及机架电机65,转板61连接于支杆62上端,支杆62与支板1转动连接,支杆62通过l形杆66与齿盘32连接;第一框架63和第二框架64通过第一转轴68转动连接于转板61和齿盘32上;机架电机65设于转板61上并与任一第一转轴68传动连接;第一框架63和第二框架64的一端通过磁性锁67连接;磁性锁67为通电后进行解锁的电磁锁,以便于将第一框架63和第二框架64沿一端打开,使机架2能够脱离槟榔树干。
38.具体地,如图9所示,压紧机构包括第一电动推杆51、压紧支架52、第一弹簧53以及压紧轮54,第一电动推杆51设于机架2的一侧;第一电动推杆51的输出端连接有限位板55,压紧轮54转动设于压紧支架52上,压紧轮54为四个,以通过四个压紧轮54来将机架2夹紧于槟榔树上;压紧支架52通过限位杆56与限位板55滑动连接,第一弹簧53套于限位杆56上并位于压紧支架52和限位板55之间,以通过第一电动推杆51的伸缩运动来推动压紧轮54对槟榔树进行夹紧,并结合行走机构来夹紧槟榔树进行螺旋攀爬。
39.具体地,行走机构包括发动机41和行走爬升轮42,发动机41设于框架的一侧,行走爬升轮42通过支架43设于框架内一侧并与发动机41传动连接;发动机41通过传动链和链轮与行走爬升轮42传动连接;上机架21和下机架22上每组行走爬升轮42的个数为四个,以倾斜贴合槟榔树进行螺旋爬升;还可以将发动机41替换成电机驱动的模式来攀爬槟榔树。
40.具体地,如图2所示,水平旋转机构包括水平旋转电机31和齿盘32,水平旋转电机31设于支板1上,齿盘32转动设于支板1上,水平旋转电机31的输出端通过齿轮与齿盘32传动连接,以使水平旋转电机31可驱动齿盘32转动来带动支杆62转动,从而带动连接于支杆62上的机架2进行水平转动,以便于调节机架2的水平角度,从而使切割机构来对准槟榔果串进行切割采摘,且通过水平调节角度以便于将机架2调节至夹紧下一棵槟榔树。
41.实施例3:
42.如图10至图12所示,结合实施例2的技术方案,本实施例中,跨越机构包括转杆71﹑平行杆72﹑第一棘轮73﹑第二棘轮74以及驱动电机75,转杆71的两端通过轴杆转动连接于上支板11和下支板12上;平行杆72的两端交接于上支板11和下支板12上并与转杆71平行;轴杆包括上轴杆3和下轴杆4;第一棘轮73和第二棘轮74间隔设于下轴杆4上;驱动电机75设于下支板12上,下轴杆4的一端设有从动锥齿轮81,下支板12上通过转管82设有主动锥齿轮83,从动锥齿轮81与主动锥齿轮83啮合;转管82内转动连接有第二转轴84,第二转轴84通过齿轮与驱动电机75传动连接,以使驱动电机75驱动第二转轴84转动来带动转管82进行转动,使连接于转管82上的主动锥齿轮83转动驱动从动锥齿轮81转动,从而使下轴杆4转动来带动转杆71进行转动;第一棘轮73和第二棘轮74分别对转杆71的单一方向进行限制,以通过双棘轮的设置来使转杆71能够稳定绕机架2进行转动,使机架2在转杆71的转动下进行水平直线运动。
43.具体地,第二转轴84位于下支板12内设有转齿85,转齿85两端传动连接有齿条78,
下支板12上设有与第一棘轮73和第二棘轮74配合的第一棘爪76和第二棘爪77,第一棘爪76和第二棘爪77分别与齿条78连接;第二转轴84端部设有条形凸起841,转管82内设有半圆槽821,条形凸起841位于半圆槽821内,第二转轴84通过转动与半圆槽821端部抵接来带动转管82转动;齿条78的一端设有弹性齿781,弹性齿781通过短轴设于齿条78的一端,短轴上设有复位扭簧,以使转齿85通过正反转来切换驱动转齿85两侧齿条78进行直线运动,从而使第一棘爪76和第二棘爪77切换的对第二轴杆进行单向转动限制,以防止转杆71在转动的过程中机架2反向晃动或者转动的问题出现;当第二转轴84正向转动时,条形凸起841在第二转轴84的带动下向转管82内半圆形槽的一侧转动以推动转管82转动,转齿85驱动一侧的齿条78移动以使第一棘爪76脱离第一棘轮73,第二棘爪77不动;在驱动电机75和机架2重力作用下,转杆71倾斜向下运动以带动打开的上机架21进行水平向下运动,此时,弹性锁搭配驱动电机75来控制转杆71的转动,以防止转杆71在上机架21的重量作用下迅速下落的问题出现;当第二转轴84反向转动时,条形凸起841从半圆形槽的一侧转动至半圆槽821的另一侧并与转管82抵接,以推动转管82进行反向转动,此过程中,转齿85驱动另一侧的齿条78移动以使第二棘爪77脱离第二棘轮74,第一棘爪76则在转齿85的反向转动下进行回位与第一棘轮73配合,在驱动电机75驱动下,转杆71倾斜向上运动以带动打开的上机架21进行水平向下上运动,或转杆71倾斜向下运动以带动打开的下机架22进行水平向下运动来实现采摘机跨越;当条形凸起841跟随第二转轴84转动至半圆形槽的中部时,第一棘爪76和第二棘爪77分别位于第一棘轮73和第二棘轮74上,以对下轴杆4进行锁紧,从而使转杆71固定不动。通过双棘轮,并依靠两条齿条78和转齿85来实现切换对转杆71进行单向转动的限制,同时,结合弹性锁来实现转杆71的绕支板1转动的稳定性。
44.具体地,两条齿条78的两端均设有弹簧,以使转齿85在正转和反转的过程中能够依靠弹簧作用力来使齿条78上的弹性齿781与转齿85配合。
45.具体地,切割机构可安装于下机架22上,以使上机架21位于槟榔树下端,下机架22位于槟榔树上端,采用此安装方法可实现棘轮和驱动电机75上置于槟榔树来控制下端的上机架21水平移动,可有效降下轴杆4转动过程中棘轮对棘爪的影响,提高机架2的水平调节稳定性。
46.实施例4:
47.如图7所示,结合实施例3的技术方案,本实施例中,弹性锁包括连接于上轴杆3上的锁盘91﹑连接盘92﹑弹性盘93以及第二电动推杆94,连接盘92固定设于第二电动推杆94的输出端;锁盘91上沿周向设有多个锁孔911,连接盘92上沿周向滑动设有多根锁杆95,弹性盘93连接于锁杆95的端部,锁杆95位于连接盘92和弹性盘93之间套有第二弹簧96,以通过第二弹簧96来控制连接盘92上的锁杆95弹性与锁孔911插接;当第二电动推杆94拉动连接盘92向远离锁盘91方向移动时,锁杆95上位于连接盘92一侧的限位环推动锁杆95收缩脱离锁孔911以对上轴杆3进行解锁。
48.具体地,如图1所示,切割机构包括第三电动推杆101和采摘刀头102,第三电动推杆101设于机架2上,采摘刀头102设于第三电动推杆101的输出端,以通过第三电动推杆101的伸缩运动来推动采摘刀头102对槟榔果进行切割采摘;进一步地,第三电动推杆101的端部还设有用于监控的摄像头,以通过摄像头来提高切割精度,从而提高槟榔采摘质量。
49.以上,仅为本发明的较佳实施例,并非对本发明做任何形式上的限制。任何熟悉本
领域的技术人员,在不脱离本发明技术方案范围情况下,都可利用上述技术内容对本发明技术方案做出许多可能的变动和修饰,或修改为等同变化的等效实施例。因此,凡是未脱离本发明技术方案的内容,依据本发明的技术对以上实施例所做的任何改动修改、等同变化及修饰,均属于本技术方案的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1