空间植物水分养分供应系统的制作方法
1.本发明涉及长期载人航天环境控制与生命保障技术研究领域,特别是涉及一种空间植物水分养分供应系统。
背景技术:
2.受控生态生保系统(controlled ecological life support system,celss)是未来长期载人航天所必须配置的环境控制与生命保障系统。它以生物再生技术为特征,有机融合非再生和物化再生生保技术,通过植物生产、微生物分解等生物过程的引入,实现大气、水资源再生,同时实现食物的生产供应。大幅减少深空探测与星际驻留等长期载人航天任务中物资补给需求。
3.植物是受控生态生保系统中的关键功能部件,它利用光合作用和蒸腾作用,可以为满足航天员对食物、氧气和净水等生保物资需求,同时去除二氧化碳和微量有害气体,缓解航天员的心理压力(hoehn et al.,1998)。因此,在空间站等人工设施中开展植物栽培技术研究,对于探索植物功能部件在celss系统中的作用和功能,理解植物的基础生物学特性,保证航天员的长期驻留有非常积极的意义(rajapakse et al.,2009)。
4.不同于地球重力环境,植物在空间微重力条件下生长发育会受到一系列影响。在空间培养植物,涉及到大气环境控制技术、水分/养分供给技术、光环境控制技术和植物选育技术等多项关键技术。尤其是空间植物水分养分供应技术,是影响植物能否在空间正常生长的关键技术。
技术实现要素:
5.本发明的目的是提供一种空间植物水分养分供应系统。
6.本发明的空间植物水分养分供应系统,包括:
7.用于栽培植物的栽培模块,所述栽培模块设置有多孔栽培基质;
8.用于储水的水箱;
9.用于将水箱中的水输送给栽培模块的供水模块,与栽培模块与水箱分别连接;
10.测控模块,包括电脑、用于测量多孔栽培基质的水分含量的水分传感器、用于测量多孔栽培基质的电导率的电导传感器、用于测量多孔栽培基质的氧气含量的氧气传感器、用于测量水箱内水的体积的体积传感器,所述水分传感器、电导传感器、氧气传感器、体积传感器分别与电脑连接。
11.本发明的空间植物水分养分供应系统,其中,栽培模块还包括栽培盘、气泵、曝气头,栽培盘内设置多孔栽培基质,多孔栽培基质上部铺装透气不透水的泡沫层,泡沫层上安装一层固定板,固定板设置有透气孔,栽培盘内设置曝气头,所述曝气头与气泵连接,用于向栽培盘泵入空气。
12.本发明的空间植物水分养分供应系统,其中,水箱为密封结构,水箱容积2.0~10.0l,水箱内设置波纹管以及体积传感器。
13.本发明的空间植物水分养分供应系统,其中,供水模块包括水泵、压力调节阀、压力表、截止阀、电磁阀、多孔管,所述水泵与水箱联通,所述水泵通过进水管路与多孔管连通,所述多孔管为多个,分别平行设置于栽培盘内,所述进水管路上依次安装压力调节阀、压力表、截止阀、电磁阀。
14.本发明的空间植物水分养分供应系统,其中,所述多孔管外管径5.0~15.0mm,外部包裹导水材料,导水材料厚度2.0~5.0mm,导水材料吸水量为5.0~15.0倍自身重量。
15.本发明的空间植物水分养分供应系统,其中,所述进水管路上设置压力传感器,所述压力传感器与电脑连接,用于检测进水管路的压力。
16.本发明的空间植物水分养分供应系统,其中,栽培盘高度5.0~10.0cm,多孔栽培基质由矿物岩石煅烧造粒而成,容重0.4~0.8g
·
cm-3
,粒径0.5~2.0mm,圆球形,ph5.5~7.0,净填充高度4.5~9.5cm。
17.本发明的空间植物水分养分供应系统,其中,还包括养分模块,所述养分模块为控释肥,用于为植物提供生长所需的矿质养分,所述控释肥中n、p、k占重量比25.0~40.0%,ca、mg、s占重量比比0.8~1.5%,fe、mn、b、cu、zn、mo、cl,占重量比0.3~0.5%,总养分含量26.1~42.0%,控释肥为颗粒状,粒径3.0~5.0mm,控释肥施用量为7.5~15.0g
·
l-1
栽培基质。
18.本发明与现有技术相比的优点在于:
19.(1)本发明采用计量式的密闭水箱结构,可在空间微重力环境下实时测量水箱中的体积,实时掌握植物根系吸水利用水分状况。
20.(2)本发明采用多孔管+导水材料+多孔栽培基质的结构,利用多孔材料的毛细作用力,可在空间微重力环境下“锁住”水分并为植物根系主动实时定量供应水分,解决了空间微重力根系的水分供应难题。同时,通过控释肥并结合水分供应,可为不同植物提供实时定量的养分供应。
21.(3)本发明采用多类传感器实时监测植物根系水分、养分和氧气等环境条件,并通过水泵和气泵等设备来调节满足植物根系最佳生长环境条件,减少航天员的栽培操作时长和负荷。
附图说明
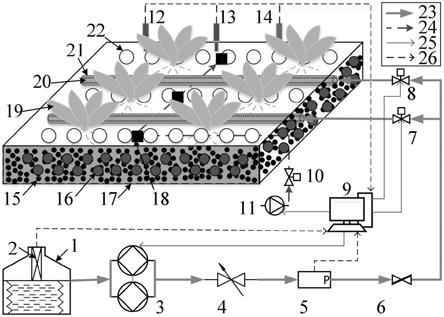
22.图1为本发明的空间植物水分养分供应系统的结构示意图。
23.图中:1水箱,2体积传感器,3水泵,4压力调节阀,5压力表,6截止阀,7第一电磁阀,8第二电磁阀,9测控电脑,10电磁阀3,11气泵,12水分传感器,13电导传感器,14氧气传感器,15多孔栽培基质,16控释肥,17栽培盘,18曝气头,19植物,20多孔管,21导水材料,22透气孔,23输水管,24通气管,25控制线路,26测量线路。
具体实施方式
24.如图1所示,本发明的空间植物水分养分供应系统,包括:
25.用于栽培植物的栽培模块,所述栽培模块设置有多孔栽培基质;
26.用于储水的水箱;
27.用于将水箱中的水输送给栽培模块的供水模块,与栽培模块与水箱分别连接;
28.测控模块,包括电脑、用于测量多孔栽培基质的水分含量的水分传感器、用于测量多孔栽培基质的电导率的电导传感器、用于测量多孔栽培基质的氧气含量的氧气传感器、用于测量水箱内水的体积的体积传感器,所述水分传感器、电导传感器、氧气传感器、体积传感器分别与电脑连接。
29.本发明的空间植物水分养分供应系统,其中,栽培模块还包括栽培盘、气泵、曝气头,栽培盘内设置多孔栽培基质,多孔栽培基质上部铺装透气不透水的泡沫层,泡沫层上安装一层固定板,固定板设置有透气孔,栽培盘内设置曝气头,所述曝气头与气泵连接,用于向栽培盘泵入空气。
30.本发明的空间植物水分养分供应系统,其中,水箱为密封结构,水箱容积2.0~10.0l,水箱内设置波纹管以及体积传感器。
31.本发明的空间植物水分养分供应系统,其中,供水模块包括水泵、压力调节阀、压力表、截止阀、电磁阀、多孔管,所述水泵与水箱联通,所述水泵通过进水管路与多孔管连通,所述多孔管为多个,分别平行设置于栽培盘内,所述进水管路上依次安装压力调节阀、压力表、截止阀、电磁阀。
32.本发明的空间植物水分养分供应系统,其中,所述多孔管外管径5.0~15.0mm,外部包裹导水材料,导水材料厚度2.0~5.0mm,导水材料吸水量为5.0~15.0倍自身重量。
33.本发明的空间植物水分养分供应系统,其中,所述进水管路上设置压力传感器,所述压力传感器与电脑连接,用于检测进水管路的压力。
34.本发明的空间植物水分养分供应系统,其中,栽培盘高度5.0~10.0cm,多孔栽培基质由矿物岩石煅烧造粒而成,容重0.4~0.8g
·
cm-3
,粒径0.5~2.0mm,圆球形,ph5.5~7.0,净填充高度4.5~9.5cm。
35.本发明的空间植物水分养分供应系统,其中,还包括养分模块,所述养分模块为控释肥,用于为植物提供生长所需的矿质养分,所述控释肥中n、p、k占重量比25.0~40.0%,ca、mg、s占重量比比0.8~1.5%,fe、mn、b、cu、zn、mo、cl,占重量比0.3~0.5%,总养分含量26.1~42.0%,控释肥为颗粒状,粒径3.0~5.0mm,控释肥施用量为7.5~15.0g
·
l-1
栽培基质。
36.本发明的空间植物水分养分供应系统,包括五个部分,即水箱、供水模块、养分模块、栽培模块和测控模块。水箱主要用于预先储存水分以给植物生长过程实时提供水分。供水模块主要采用多孔管、导水材料和多孔栽培基质的供水模式,将水分实时均匀输送到植物根系周围。养分模块主要采用控释肥为植物根系提供定量养分供给。栽培模块主要为供水模块、养分模块提供空间,栽培植物并为植物根系提供合理的氧气供应。测控模块主要测量多孔栽培基质中的水分含量、电导率和氧气含量,以及水箱水分体积和管路水分压力等参数,控制水泵、气泵和电磁阀工作状态,将相应的参数控制在合理范围内。
37.本发明采用密闭水箱结构,可在空间微重力环境下实时测量水箱中的体积。采用多孔管+导水材料+多孔栽培基质的结构,利用多孔材料的毛细作用力,可在空间微重力环境下“锁住”水分并为植物根系主动实时定量供应水分。通过控释肥并结合水分供应,可为不同植物提供实时定量的养分供应。自动监测并调节植物生长环境参数,减少航天员的栽培操作时长和负荷。
38.用于在微重力环境下供水的多孔管采用金属粉末(或高分子材料)烧结而成,管壁
微孔孔径2.0~10.0μm,孔隙率30.0%~50.0%。
39.本发明的技术解决方案是:一种空间植物水分养分供应系统,包括五个部分,即水箱、供水模块、养分模块、栽培模块和测控模块。水箱主要用于预先储存水分以给植物生长过程实时提供水分。供水模块主要采用多孔管、导水材料和多孔栽培基质的供水模式,将水分实时均匀输送到植物根系周围。养分模块主要采用控释肥为植物根系提供定量养分供给。栽培模块主要为供水模块、养分模块提供空间,栽培植物并为植物根系提供合理的氧气供应。测控模块主要测量多孔栽培基质中的水分、电导和氧气含量,以及水箱水分体积和管路水分压力等参数,控制水泵、气泵和电磁阀工作状态,将相应的参数控制在合理范围内。
40.所述水箱为密封结构,主要由箱体、波纹管和体积传感器组成。水分预先装填在水箱中,调整波纹管初始位置,体积传感器调整至初始状态,然后密封水箱。水分被水泵输送至栽培盘栽培基质中,水箱中的水分体积逐渐减少,体积传感器可实时监测水分体积并反馈至测控电脑。当水箱水分不足时,需要手动添加水分,不断满足植物根系水分需求。水箱容积2.0~10.0l。
41.所述供水模块主要由水泵、压力调节阀、压力表、截止阀、电磁阀、多孔管和导水材料组成。在空间微重力环境下,没有重力作用,水分会四处飘散。供水模块主要采用主动供水方式,定量供应水分至多孔管,多孔管再将水分通过微孔扩散至包裹的导水材料,导水材料继续通过毛细作用力将水分传到至栽培盘中的多孔栽培基质中。通过该供水方式,可有效“锁住”水分并被栽培基质中的植物根系吸收利用。多孔管为金属粉末(或高分子材料)烧结而成,多孔管外管径5.0~15.0mm,管壁微孔孔径2.0~10.0μm,孔隙率30.0%~50.0%,具有良好的亲水性。多孔管外部包裹导水材料,导水材料厚度2.0~5.0mm,导水材料吸水量为5.0~15.0倍自身重量。水泵的供水量可通过压力调节器调节管道中的水分压力来进行调节。
42.所述养分模块主要采用控释肥为不同植物提供生长所需的矿质养分,控释肥含大量元素n、p、k,占比25.0~40.0%;中量元素ca、mg、s,占比0.8~1.5%;微量元素fe、mn、b、cu、zn、mo、cl,占比0.3~0.5%。总养分含量26.1~42.0%。控释肥为颗粒状,粒径3.0~5.0mm。控释肥施用量为7.5~15.0g
·
l-1栽培基质。
43.所述栽培模块主要由栽培盘、多孔栽培基质、气泵、曝气头和透气孔等组成。栽培盘主要用于容纳栽培基质,其面积主要由栽培植物数量确定,栽培盘高度5.0~10.0cm。多孔栽培基质由矿物岩石煅烧造粒而成,容重0.4~0.8g
·
cm-3,粒径0.5~2.0mm,近圆球形,振动时不产生灰尘或粉末,加水时无明显沉降,ph5.5~7.0。净填充高度4.5~9.5cm。微重力下,没有对流作用,水和气无法自动分离,根系呼吸产生的二氧化碳会聚集在根系周围容易造成缺氧。气泵和曝气头主要通过强制通风方式为根系提供氧气供应。此外,在栽培基质上部铺装透气但不透水的泡沫层,并在其上安装一层固定板,以防止栽培基质在微重力环境中漂浮。同时,固定板上还有透气孔,以促进根系与外部环境的气体交换。
44.所述测控模块主要由测控电脑、各类传感器和控制设备/部件组成。在水分供应和养分供应过程中,测控模块需实时监测基质中水分含量、电导率(表征养分含量)和氧气含量,以及水箱中的水分体积,输水管路中的压力等参数值,当其值低于设定值时,通过相应的水泵、气泵、电磁阀和压力调节器等控制设备/部件来调节相应的参数值,以满足植物生长的需要。基质含水量范围25.0~35.0%(体积比),电导率范围500.0~1200.0ms
·
cm-1
,氧
气含量范围18.0~21.0%,水箱体积范围0.0~10.0l。
45.本发明与现有技术相比的优点在于:
46.(1)本发明采用计量式的密闭水箱结构,可在空间微重力环境下实时测量水箱中的体积,实时掌握植物根系吸水利用水分状况。
47.(2)本发明采用多孔管+导水材料+多孔栽培基质的结构,利用多孔材料的毛细作用力,可在空间微重力环境下“锁住”水分并为植物根系主动实时定量供应水分,解决了空间微重力根系的水分供应难题。同时,通过控释肥并结合水分供应,可为不同植物提供实时定量的养分供应。
48.(3)本发明采用多类传感器实时监测植物根系水分、养分和氧气等环境条件,并通过水泵和气泵等设备来调节满足植物根系最佳生长环境条件,减少航天员的栽培操作时长和负荷。
49.如图1所示,构建空间植物水分养分供应系统。该系统主要由水箱、供水模块、养分模块、栽培模块和测控模块五部分组成。
50.水箱1主要由箱体、波纹管和体积传感器2组成。水箱1容积为5.0l,预先将5.0l水分装填在水箱1中,调整波纹管初始位置,体积传感器2调整至初始状态,然后密封水箱。在植物种子萌发和植株生长过程中,水分被水泵3输送至栽培盘17的多孔栽培基质15中,水箱1中的水分体积不断减少,期间体积传感器2可实时监测水分体积并反馈至测控电脑9。当水分不足时,手动给水箱1添加水分,不断满足植物根系水分需求。
51.供水模块主要由水泵3、压力调节阀4、压力表5、截止阀6、第一电磁阀7、第二电磁阀8、多孔管20和导水材料21组成。多孔管20采用金属不锈钢粉末烧结而成,多孔管外管径8.0mm,内径4.0mm,管壁微孔孔径5.0μm,孔隙率35.0%。多孔管外部包裹导水材料,导水材料厚度2.0mm,导水材料吸水量为8.0倍自身重量。
52.养分模块所采用的控释肥16主要为樱桃萝卜提供生长所需的矿质养分,控释肥含大量元素n、p、k,占比32.0%;中量元素ca、mg、s,占比1.0%;微量元素fe、mn、b、cu、zn、mo、cl,占比0.5%。总养分含量33.5%。控释肥为颗粒状,粒径3.0~5.0mm。施用时,将控释肥16颗粒与栽培盘17中的中下部的多孔栽培基质15按7.5g
·
l-1栽培基质混匀,然后再装填。
53.栽培模块主要由栽培盘17、多孔栽培基质15、气泵11、曝气头18和透气孔22等组成。栽培盘17采用黑色树脂3d打印而成,主要用于容纳多孔栽培基质15,长35cm,宽30cm,高5.0cm。多孔栽培基质15由页岩矿物岩石高温煅烧造粒而成,容重0.63g
·
cm-3,粒径1.0~2.0mm,近圆球形,ph6.5。净填充高度4.5cm。
54.测控模块主要由测控电脑9、水分传感器12、电导传感器13、氧气传感器14、体积传感器2、压力表5和控制设备/部件如水泵3、气泵11、第一电磁阀7、第二电磁阀8和电磁阀310等组成。在樱桃萝卜种子萌发和植株生长过程中,测控模块需要将不同参数控制在一定范围内,其中基质含水量范围25.0~35.0%体积比,电导率范围500.0~800.0ms
·
cm-1
,氧气含量范围18.0~21.0%,水箱体积范围0.0~5.0l。
55.樱桃萝卜培养过程中的水分和养分供应过程如下。
56.首先,栽培盘17中已预先安装多孔管20、导水材料21、水分传感器12,电导传感器13,氧气传感器14和曝气头18。将高温高压灭菌后的1669.5g干燥多孔栽培基质15与35.44g控释肥按7.5g
·
l-1
装填充分混匀,然后装填在栽培盘17中。再将剩余834.75g多孔栽培基质
15覆盖在上部,总装填高度4.5cm,总装填基质为2504.25g。然后,再铺装泡沫层和固定层。
57.第二,在水箱1中装填5.0l水分,密闭水箱1。启动测控电脑9,测量多孔栽培基质15中的水分含量、电导率和氧气含量,以及水箱1中的水分体积。水分传感器12测量多孔栽培基质15含水量低于25%,水泵3开始将水分通过输水管23、多孔管20和导水材料21输送到干燥的栽培基质15中,直至其含水量上升至35%,供水量约1502.55ml。
58.第三,播种樱桃萝卜植物19种子,共9穴,每穴3~5粒。第三天,种子开始萌发,开始光照处理额外单独配置光源,光源正下方15.0cm处光强300μmol
·
m-2
·
s-1
。光周期16h光/8h暗。生长室内大气温度24.0℃,湿度40.0~65.0%,二氧化碳浓度500ppm。樱桃萝卜植株开始生长,三叶期时间苗定值一株樱桃萝卜,继续生长。
59.第四,樱桃萝卜生长期间,水分传感器12、电导传感器13、氧气传感器14持续测量多孔栽培基质15中的水分含量、电导率和氧气含量,并通过测量线路26传导至测控电脑9。当水分含量低于25.0%,氧气含量低于18.0%时,测控电脑9通过控制线路25发送指令给水泵3和气泵11,水泵3和气泵11自动分别通过输水管23和通气管24为多孔栽培基质15加注水分和空气,直至其含量达到设定值上限,即35.0%含水量和21.0%氧气含量。而樱桃萝卜生长过程中,表征养分含量的电导率维持在650.0~750.0ms
·
cm-1
,满足植物生长需要。
60.第五,第35天,樱桃萝卜成熟,进行收获。收获计算单株樱桃萝卜植株平均鲜重55.35g
·
plant-1
,单位面积的生产效率鲜重为158.15g
·
m-2
·
s-1
。期间共耗水14.5l,为水箱1手动补充水分2次,每次5.0l。樱桃萝卜的水分利用效率为3.90g干物质
·
l-1
水或者形成单位干物质的耗水量为0.262l水
·
g-1
干物质。
61.以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1