一种应用仿生碎土刀的视觉监测花生收获机底盘结构
1.本发明涉及农业机械技术领域,具体为一种应用仿生碎土刀的视觉监测花生收获机底盘结构。
背景技术:
2.我国的花生种植范围广,地区分布多,各地土壤情况以及种植品种均不相同,差异显著,适宜的花生机械化收获模式也千差万别。目前,我国种植的花生品种适收期短、分枝多,机械收获时易出现落果和荚果破碎的问题。总体来看,缺少适应性强、可靠性高、技术成熟的花生收获机具。为了提高收获过程中收获效率,并且提高机具的自适应情况,提高机具通用性,因此需要设计一种应用仿生碎土刀的视觉监测花生收获机底盘结构,用于花生收获为提高花生生产综合机械化水平提供机具支持。
技术实现要素:
3.(一)解决的技术问题
4.针对现有技术的不足,本发明提供了一种应用仿生碎土刀的视觉监测花生收获机底盘结构,解决了花生通过机械收获时易出现落果和荚果破碎的问题,提供了一种适应性强、可靠性高、技术成熟的花生收获机具。
5.(二)技术方案
6.本发明为了实现上述目的具体采用以下技术方案:
7.一种应用仿生碎土刀的视觉监测花生收获机底盘结构,包括机械部件与电控部件,所述机械部件包括去叶刀轴、调节油缸、前机架、传感器固定座、后机架、风管、后输送网带、后传送液压驱动器、伺服电机、前传送液压驱动器、前输送网带、挖掘圆盘液压驱动器、刀轴液压驱动器、仿生碎土刀、圆盘刀、挖掘铲和风机,所述风机固定安装于后机架上对应前传送液压驱动器和后传送液压驱动器之间,所述风管安装于后机架内部对应后输送网带上方位置,所述风机的出风口与风管进风口连接,所述风机通过伺服电机驱动工作;
8.所述电控部件包括环形电容传感器、openmv摄像头和控制器,所述传感器固定座安装于前机架上,所述环形电容传感器布置于前输送网带和后输送网带的表面,所述环形电容传感器用于监测前输送网带和后输送网带上的物料厚度,所述openmv摄像头和控制器安装于传感器固定座上,所述openmv摄像头在定时捕捉下进行色彩识别,分辨土壤含杂率,通过控制阈值调节风机风量。
9.进一步地,所述前机架连接于后机架前端,所述去叶刀轴通过轴承座连接在前机架上,所述刀轴液压驱动器固定安装于前机架侧部,通过刀轴液压驱动器为去叶刀轴提供动力,负责将花生收获过程中的茎叶去除,并起到带动花生秧苗产生初步松土作用。
10.进一步地,所述刀轴液压驱动器安装于挖掘圆盘液压驱动器一侧并用于去叶刀轴驱动控制,所述仿生碎土刀与圆盘刀固定在同一根刀轴上,由固定于后机架上的挖掘圆盘液压驱动器提供动力,用于将土壤打碎,分离花生与根须,所述去叶刀轴通过调节油缸进行
高度控制。
11.进一步地,所述挖掘铲、前输送网带、后输送网带自后机架前端向后端依次安装,所述前输送网带和后输送网带分别通过安装于后机架上的前传送液压驱动器和后传送液压驱动器驱动动作,所述挖掘铲在机械前进的带动下,可以将花生和土壤传送到前输送网带上,后通过前输送网带、后输送网带将花生和土壤传送到车斗中。
12.进一步地,所述前输送网带上设有孔径为8mm的均布网带孔,网带孔起到将土壤与花生分离作用,在前输送网带带向后输送网带传送时,混合物会经历骤降,并伴随风机吹风,使混合物均匀分布在后输送网带上,所述后输送网带上设有孔径为8mm的均布网眼,脱净的花生随后进行进入车斗中。
13.操作说明(机器的使用方法以及基本思路),包括如下步骤:
14.步骤一、工作前,将电控系统与机械系统进行检查,并将其进行放置到指定地块,准备进行后续工作;
15.步骤二、工作中,在监控系统的控制下,通过去叶刀将其茎叶进行去除,通过仿生碎土刀与圆盘刀将土壤进行进一步碎土工作,并在之后的挖掘铲下将其传送到前输送网带处,传送网带处的动力元件通过在环形电容传感器的控制下实现整个过程地物料厚度监测,并控制液压油泵进油量,实现适应厚度进行工作,并在openmv摄像头的定时捕捉下进行色彩识别,分辨土壤含杂率,通过控制阈值情况实现调节风机风量,为后输送网带的分离工作提供前期的均布效果,随后脱净的花生进入下一步作业;
16.步骤三、工作结束时,停止监控系统,检查机械情况。
17.(三)有益效果
18.与现有技术相比,本发明提供了一种应用仿生碎土刀的视觉监测花生收获机底盘结构,具备以下有益效果:
19.本发明,通过仿生非洲裸鼹鼠牙齿的仿生碎土刀,配合依据现有的花生收割机分离清选部件,并设计了应用openmv摄像头与环形电容传感器,配合功放、运放式测量电路,控制整个机械部分的动力元件,实现高分离率、高生产效益的花生收获,解决了目前收获机具效率低、分离情况差、自适应能力差、通用性低的问题。
附图说明
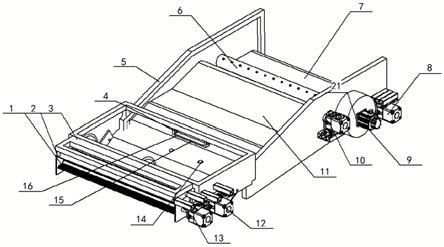
20.图1为本发明结构示意图;
21.图2为本发明内部结构示意图;
22.图3为本发明仿生碎土刀、圆盘刀的侧视图;
23.图4为本发明仿生碎土刀外形结构与切土情况示意图;
24.图5为本发明控制系统结构示意图。
25.图中:1、去叶刀轴;2、调节油缸;3、前机架;4、传感器固定座;5、后机架;6、风管;7、后输送网带;8、后传送液压驱动器;9、伺服电机;10、前传送液压驱动器;11、前输送网带;12、挖掘圆盘液压驱动器;13、刀轴液压驱动器;14、环形电容传感器;15、openmv摄像头;16、控制器;17、去叶刀;18、仿生碎土刀;19、圆盘刀;20、挖掘铲;21、风机。
具体实施方式
26.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
27.实施例
28.如图1、2和3所示,本发明一个实施例提出的一种应用仿生碎土刀的视觉监测花生收获机底盘结构,包括机械部件与电控部件,机械部件与电控部件具体结构如下:
29.机械部件:包括去叶刀轴1、调节油缸2、前机架3、传感器固定座4、后机架5、风管6、后输送网带7、后传送液压驱动器8、伺服电机9、前传送液压驱动器10、前输送网带11、挖掘圆盘液压驱动器12、刀轴液压驱动器13、仿生碎土刀18、圆盘刀19、挖掘铲20和风机21,前机架3连接于后机架5前端,去叶刀轴1通过轴承座连接在前机架3上,去叶刀轴1上设有去叶刀17,刀轴液压驱动器13固定安装于前机架3侧部,通过刀轴液压驱动器13为去叶刀轴1提供动力,负责将花生收获过程中的茎叶去除,并起到带动花生秧苗产生初步松土作用;刀轴液压驱动器13安装于挖掘圆盘液压驱动器12一侧并用于去叶刀轴1驱动控制,仿生碎土刀18与圆盘刀19固定在同一根刀轴上,由固定于后机架5上的挖掘圆盘液压驱动器12提供动力,用于将土壤打碎,分离花生与根须,去叶刀轴1通过调节油缸2进行高度控制;挖掘铲20、前输送网带11、后输送网带7自后机架5前端向后端依次安装,前输送网带11和后输送网带7分别通过安装于后机架5上的前传送液压驱动器10和后传送液压驱动器8驱动动作,挖掘铲20在机械前进的带动下,可以将花生和土壤传送到前输送网带11上,后通过前输送网带11、后输送网带7将花生和土壤传送到车斗中;前输送网带11上设有孔径为8mm的均布网带孔,网带孔起到将土壤与花生分离作用,在前输送网带11带向后输送网带7传送时,混合物会经历骤降,并伴随风机21吹风,使混合物均匀分布在后输送网带7上,后输送网带7上设有孔径为8mm的均布网眼,脱净的花生随后进行进入车斗中;风机21固定安装于后机架5上对应前传送液压驱动器10和后传送液压驱动器8之间,风管6安装于后机架5内部对应后输送网带7上方位置,风机21的出风口与风管6进风口连接,风机21通过伺服电机9驱动工作。
30.电控部件:包括环形电容传感器14、openmv摄像头15和控制器16,传感器固定座4安装于前机架3上,环形电容传感器14布置于前输送网带11和后输送网带7的表面,环形电容传感器14用于监测前输送网带11和后输送网带7上的物料厚度,openmv摄像头15和控制器16安装于传感器固定座4上,控制器16分别与环形电容传感器14和openmv摄像头15电性连接,openmv摄像头15在定时捕捉下进行色彩识别,分辨土壤含杂率,通过控制阈值调节风机21风量。
31.如图4所示,仿生碎土刀18是由前刀刃与后刀辊组成的,其仿生现有的裸鼹鼠的牙齿进行设计,由于裸鼹鼠的牙齿可以配合爪子挖掘土壤,在分析其外形尺寸的与挖土角度的情况下,结合表面曲线与碎土摩擦力等情况,设计了如图4所示的结构与挖土角度,与地面倾角为105
°
,使其产生易入土、速碎土的作业效果并在碎土工作过程中减少整个机械阻力,增加碎土效率。
32.如图5所示,一种应用仿生碎土刀的视觉监测花生收获机底盘结构,在监控系统的控制下,通过去叶刀17将花生茎叶进行去除,通过仿生碎土刀18与圆盘刀19将土壤进行进
一步碎土工作,并在之后的挖掘铲20下将其传送到前输送网带11处,前输送网带11处的动力元件通过在环形电容传感器14的控制下实现整个过程地物料厚度监测,并控制液压油泵进油量,实现适应厚度进行工作,并在openmv摄像头15的定时捕捉下进行色彩识别,分辨土壤含杂率,通过控制阈值情况实现调节风机21风量,为后输送网带7的分离工作提供前期的均布效果,随后脱净的花生进入下一步作业。
33.最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1