一种步进电机控制的全自动种菜机器人
1.本发明属于农业机器人领域,涉及一种步进电机控制的全自动种菜机器人。
背景技术:
2.随着农业生产的日趋工业化、规模化和精准化,农业机器人研发已经成为农业工程领域的科研重点之一,其在育苗、移苗等方面均得到了应用,而且农业机器人在提高农业生产力、改变农业生产模式、解决劳动力不足以及实现农业的规模化、多样化和精准化等方面展示出了极大的优越性。
3.在土地上进行种植菜苗时,需要先在地面上人工打孔,再将幼苗放进打好的孔中,然后再进行浇水,传统的种植方式农民工作强度大,工作效率低,特别是在较大规模上的种植时,人工种植的弊端进一步体现。
4.根据以上问题,本发明提出了一种步进电机控制的全自动种菜机器人,该机器人的出发点就是把工业上流水线作业的概念引进农业行业,以期更低成本更高效地种植菜苗,并且全自动化地完成打孔、下苗、埋土、浇水整个流程。
技术实现要素:
5.本发明的目的是:提供一种全自动种菜机器人,能够代替人工在大棚蔬菜里种植菜苗,并且全自动化地完成打孔、下苗、埋土、浇水整个流程。
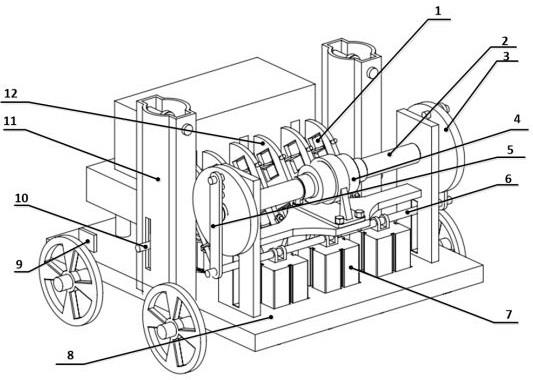
6.本发明采取的技术方案为:一种步进电机控制的全自动种菜机器人,由打孔机构、菜苗下料机构、埋土装置、浇水机构四部分组成;包括拨片1,传动轴2,圆盘3,步进电机4,连杆5,前传动杆6,打孔装置7,机架8,控制器9,后传动杆10,支撑架11,菜苗下料滑轨12,菜苗存放箱13,水箱14,电控开关15,水管16,挡板17,螺母18,液压杆19,电机外壳20,调节孔21,滑槽22,导轨23,电机24,大孔25,小孔26,爪27。
7.所述的打孔机构由传动轴2、圆盘3、步进电机4、连杆5、前传动杆6、打孔装置7、滑槽22组成;固定装置将步进电机4通过螺栓连接固定在机架8上,步进电机4的左右两侧通过花键连接传动轴2,传动轴2的两侧花键连接圆盘3,圆盘3与连杆5通过铰链连接,两个连杆5之间连接固定连接前传动杆6,在前传动杆6上固定连接打孔装置7,滑槽22分布在打孔装置7的四个面上,导轨在机架8上。
8.所述的菜苗下料机构由拨片1、菜苗下料滑轨12、菜苗存放箱13、挡板17、螺母18组成;菜苗存放箱13固定连接在水箱14上,菜苗下料滑轨12固定连接在菜苗存放箱13的前面,两个拨片1通过铰链连接在菜苗下料滑轨12中,螺母18通过螺纹连接拨片1和菜苗下料滑轨12,挡板17固定在机架8上。
9.所述的埋土装置由后传动杆10、支撑架11、液压杆19、电机外壳20、电机24、爪27组成;液压杆19的上端固定连接在支撑架11中,两个液压杆19之间通过固定连接后传动杆10,在后传动杆10上固定连接电机外壳20,电机外壳20固定连接电机24,爪27固定连接在电机24的输出轴上。
10.所述的浇水机构由水箱14、电控开关15、水管16、小孔26组成;电控开关15固定连接在水箱14上,大孔25和小孔26在机架8上,水箱14和水管16固定连接,水管16穿过小孔26。
11.所述的控制器9主要控制步进电机4和电机24的正反转、控制电控开关15的通断以及液压杆19的伸缩,步进电机4将扭矩传递给传动轴2,传动轴2将扭矩传递给两侧花键连接的圆盘3,圆盘3带动铰链连接的连杆5,进而带动两个连杆5之间固定连接的前传动杆6进行上下移动,使得打孔装置7进行上下移动;电控开关15的通断主要控制水箱14中的水通过水管16流出或截止;两个液压杆19的伸缩带动之间固定连接的后传动杆10进行上下移动,从而带动固定连接电机外壳20过盈配合的电机24进行移动;电机24带动底部固定连接四个互为90
°
的爪27进行转动。
12.本发明的有益效果是:一种步进电机控制的全自动种菜机器人,控制器9控制步进电机4将扭矩传递给传动轴2,传动轴2将扭矩传递给圆盘3,圆盘3带动铰链连接的连杆5,带动两个连杆5之间连接的前传动杆6上下移动,使得打孔装置7进行上下移动;菜苗从菜苗存放箱13出口滑出,经过菜苗下料滑轨12滑进大孔25,挡板17保证菜苗顺利进入大孔25,在菜苗下料滑轨12前端组成的两个拨片1在摩擦力的作用下初次延缓菜苗的滑行速度,在菜苗下料滑轨1后端的两个拨片1通过调节螺母18的松紧来增加或减少摩擦力进行二次延缓菜苗的下滑速度;控制器9控制两个液压杆19的伸缩带动之间连接的后传动杆10进行上下移动,从而带动连接电机外壳20固定连接的电机进行位置的移动,控制器9控制电机24带动底部固定连接四个互为90
°
的爪27进行转动;可以根据打孔的深度来调节连杆5与圆盘3上的调节孔21的安装位置。
附图说明
13.图1是一种步进电机控制的全自动种菜机器人的轴测图。
14.图2是菜苗下料机构的左视图。
15.图3是打孔机构和埋土装置的轴测图。
16.图4是一种步进电机控制的全自动种菜机器人的仰视图。
17.图中,1
‑
拨片,2
‑
传动轴,3
‑
圆盘,4
‑
步进电机,5
‑
连杆,6
‑
前传动杆,7
‑
打孔装置,8
‑
机架,9
‑
控制器,10
‑
后传动杆,11
‑
支撑架,12
‑
菜苗下料滑轨,13
‑
菜苗存放箱,14
‑
水箱,15
‑
电控开关,16
‑
水管,17
‑
挡板,18
‑
螺母,19
‑
液压杆,20
‑
电机外壳,21
‑
调节孔,22
‑
滑槽,23
‑
导轨,24
‑
电机,25
‑
大孔,26
‑
小孔,27
‑
爪。
具体实施方式
18.下面结合附图对本发明做详细描述。
19.如图1、图3所示,一种步进电机控制的全自动种菜机器人,其机器人的打孔机构包括传动轴2,圆盘3,步进电机4,连杆5,传动杆6,打孔装置7,机架8,控制器9,滑轨22,导轨23组成;固定装置将步进电机4通过螺栓连接固定在机架8上,控制器9控制步进电机4将扭矩传递给传动轴2,传动轴2将扭矩传递给两侧花键连接的圆盘3,圆盘3带动铰链连接的连杆5,进而带动两个连杆5之间固定连接的前传动杆6上下移动,使得打孔装置7进行上下移动,打孔装置7的四个面上的滑轨22在机架8上的导轨23中上下滑动,保证打孔装置7在竖直方向的上下运动。
20.如图1、图2、图4所示,一种步进电机控制的全自动种菜机器人,其机器人菜苗下料机构包括拨片1,菜苗下料滑轨12,菜苗存放箱13,水箱14,挡板17,螺母18,大孔25组成;菜苗存放箱13固定连接在水箱14上,菜苗下料滑轨12固定连接在幼苗存放箱13的前面,菜苗从幼苗存放箱13出口滑出,经过菜苗下料滑轨12滑进大孔25,挡板17保证菜苗顺利进入大孔25,在菜苗下料滑轨12前端组成的两个拨片1在摩擦力的作用下初次延缓菜苗的滑行速度,在菜苗下料滑轨12后端的两个拨片1通过调节螺母18的松紧来增加或减少摩擦力进行二次延缓菜苗的下滑速度。
21.如图1、图3、图4所示,一种步进电机控制的全自动种菜机器人,其机器人埋土装置包括机架8,控制器9,后传动杆10,支撑架11,液压杆19,电机外壳20,电机24,爪27;支撑架11固定连接在机架8上,液压杆19的上端固定连接在支撑架11中,控制器9控制两个液压杆19的伸缩来带动之间固定连接的后传动杆10进行上下移动,从而带动连接电机外壳20固定连接的电机24进行位置的移动,控制器9控制电机24带动底部连接四个互为90
°
的爪27进行转动。
22.如图1、图2、图4所示,一种步进电机控制的全自动种菜机器人,其机器人的浇水机构包括机架8,水箱14,电控开关15,水管16组成;水箱14固定连接在机架8上,水箱14和水管16固定连接,水管16穿过小孔26,控制器9控制电控开关15的通断来控制水的流出或截止。
23.本发明中各部件的作用如下:打孔机构是控制器9先控制步进电机4将扭矩传递给传动轴2,传动轴2将扭矩传递给两侧花键连接的圆盘3,圆盘3带动铰链连接的连杆5,进而带动两个连杆5之间固定连接的前传动杆6上下移动,带动打孔装置7进行上下移动,完成打孔步骤。
24.菜苗下料机构是菜苗从菜苗存放箱13出口滑出,经过菜苗下料滑轨12滑进大孔25,挡板17保证菜苗顺利进入大孔25,在菜苗下料滑轨12前端的组成的两个拨片1在摩擦力的作用下初次延缓菜苗的滑行速度,在菜苗下料滑轨1后端的两个拨片1通过调节螺母18的松紧来增加或减少摩擦力进行二次延缓菜苗的下滑速度,完成种菜苗步骤。
25.埋土装置是控制器9控制两个液压杆19的伸缩来带动之间固定连接的后传动杆10进行上下移动,从而带动连接电机外壳20固定连接的电机24进行上下位置的变化,控制器9控制电机24转动,从而带动电机24底部连接四个互为90
°
的爪27进行转动,完成松土、埋土的步骤。
26.浇水机构是控制器9控制电控开关15的通断来控制水箱14中的水流出或截止,完成浇水的步骤。
27.根据打孔的深度和需求来调节连杆5与圆盘3上的调节孔21的安装位置。
28.本发明的一种步进电机控制的全自动种菜机器人的工作原理为:一种步进电机控制的全自动种菜机器人,采用步进电机作为动力,前传动杆作为传动装置带动打孔装置7在轨道上下运动,菜苗在重力的作用下沿菜苗下料滑轨12落入孔中,在下落的过程中由于摩擦力的作用,可以调节拨片1与螺母18的松紧来控制其滑落的速度,采用伸缩液压杆使后传动杆作为传动装置带动电机上下位置的变化,在移动的过程中控制器控制电机的转动使爪27转动,采用控制器控制电控开关15的通断来控制水的流出或截止。本发明实现了控制器控制四个机构顺次工作且依次完成打孔、下苗、埋土、浇水整个流程;同时可以根据菜苗的高低对其打孔深度的调节,以及根据菜苗的重量调节螺母18的
松紧来控制下滑的速度,由此可以调节整个机器运行的速度,降低控制的难度,使之运行的更加通畅。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1