基于间距辨识的覆土时机选择系统的制作方法
1.本发明涉及存储领域,更具体地,涉及一种基于间距辨识的覆土时机选择系统。
背景技术:
2.目前,条播机作业时,由行走轮带动排种轮旋转,种子自种子箱内的种子杯按要求的播种量排入输种管,并经开沟器落入开好的沟槽内,然后由覆土镇压装置将种子覆盖压实。
3.条播机播种后,出苗的作物成平行等距的条行。用于不同作物的条播机除采用不同类型的排种器和开沟器外,其结构基本相同,一般由机架、牵引或悬挂装置、种子箱、排种器、传动装置、输种管、开沟器、划行器、行走轮和覆土镇压装置等组成。其中影响播种质量的主要是排种装置和开沟器。常用的排种器有槽轮式、离心式、磨盘式等类型。开沟器有锄铲式、靴式、滑刀式、单圆盘式和双圆盘式等类型。
4.目前,在采用条播机执行对待播种农田的并排播种操作时,能够确定的是,在种子脱离条播机的各个播种口时,由于各个播种口是均匀间隔设置的,因此种子脱离位置具有均匀间隔,但由于风力的影响以及农田的崎岖地形等要素,导致并排脱落的多个种子实际落位的各个位置的间隔并不是均匀的,严重时会影响种子的发育和生长。
技术实现要素:
5.为了解决现有技术中的技术问题,本发明提供了一种基于间距辨识的覆土时机选择系统,能够对并排脱离的各个种子在农田上实际落位的各个位置的间隔进行针对性检测,并在间隔不均匀时停止后续的覆土操作以便于采用人工间距调节或者其他间距调节模式使得各个种子在农田上实际落位的各个位置的间隔均匀,从而为每一颗种子提供充足的生长空间。
6.为此,本发明至少需要具备以下几处重要的发明点:
7.(1)在执行播种操作的排种机构每完成一次并行排种操作后,根据当前次数播种的各个种子在农田中的两两实际间隔计算实时间距标准差,并基于实时间距标准差判断是否发出允许覆土指令或者禁止覆土指令,从而在当前次数并排播种的各个种子的实际落位不佳时,禁止当前次数的自动覆土操作;
8.(2)引入智能化的视觉识别机制对当前次数播种的各个种子在农田中的两两实际间隔进行现场识别。
9.根据本发明的一方面,提供了一种基于间距辨识的覆土时机选择系统,所述系统包括:
10.定制条播机构,包括机架结构、嵌入式处理器、排种机构、开沟机构、覆土机构、划行结构和传动机构;
11.其中,所述排种机构包括设置在与所述划行结构在待播种农田上划行方向垂直的横杆上的均匀间隔的多个播种口。
12.更具体地,在所述基于间距辨识的覆土时机选择系统中:
13.所述嵌入式处理器用于在所述排种机构每完成一次并行排种操作后,根据接收到的实时间距标准差判断是否发出允许覆土指令或者禁止覆土指令。
14.更具体地,在所述基于间距辨识的覆土时机选择系统中:
15.所述嵌入式处理器用于在所述排种机构每完成一次并行排种操作后,根据接收到的实时间距标准差判断是否发出允许覆土指令或者禁止覆土指令包括:当接收到的实时间距标准差高于等于预设标准差数值时,发出禁止覆土指令。
16.更具体地,在所述基于间距辨识的覆土时机选择系统中,所述系统还包括:
17.视觉监视机构,设置在所述横杆上,与所述嵌入式处理器连接,用于在每接收到一次排种结束指令时,实现对所述横杆下方的已播种农田区域的视觉画面采集操作,以获得对应的播种区域画面;
18.种子鉴别设备,与所述视觉监视机构连接,用于基于待播种农田对应的播种种子的外形特征识别所述播种区域画面中的各个种子识别分块;
19.数值分析设备,与所述种子鉴别设备连接,用于针对每两个相邻的种子识别分块执行以下操作:获取所述两个相邻的种子识别分块分别对应的两个几何外形的两个形心,测量所述播种区域画面中所述两个形心之间最短距离经过的像素点的数目以作为所述两个相邻的种子识别分块对应的形心间距数值;
20.状态判断设备,与所述数值分析设备连接,用于获取所述播种区域画面中每两个相邻的种子识别分块对应的形心间距数值以获得各个形心间距数值,并计算所述各个形心间距数值的标准差以作为实时间距标准差;
21.其中,所述嵌入式处理器用于在所述排种机构每完成一次并行排种操作后,根据接收到的实时间距标准差判断是否发出允许覆土指令或者禁止覆土指令包括:所述排种机构采用均匀间隔的多个播种口执行一次并行排种操作;
22.其中,所述排种机构采用均匀间隔的多个播种口执行一次并行排种操作包括:每执行一次并行排种操作,每一个播种口只推送出单颗种子到待播种农田上;
23.其中,所述排种机构每完成一次并行排种操作,向所述嵌入式处理器发送一次排种结束指令;
24.其中,所述覆土机构与所述嵌入式处理器连接,用于在每接收到一次允许覆土指令时,执行一次现场覆土操作。
25.本发明的基于间距辨识的覆土时机选择系统逻辑可靠、运行稳定。由于能够对并排脱离的各个种子在农田上实际落位的各个位置的间隔进行针对性检测,并在间隔不均匀时停止后续的覆土操作,从而保证执行条播操作时并排种植的各个种子之间的间距均匀。
26.附图简要说明
27.本领域技术人员通过参考附图可更好理解本发明的众多优点,其中:
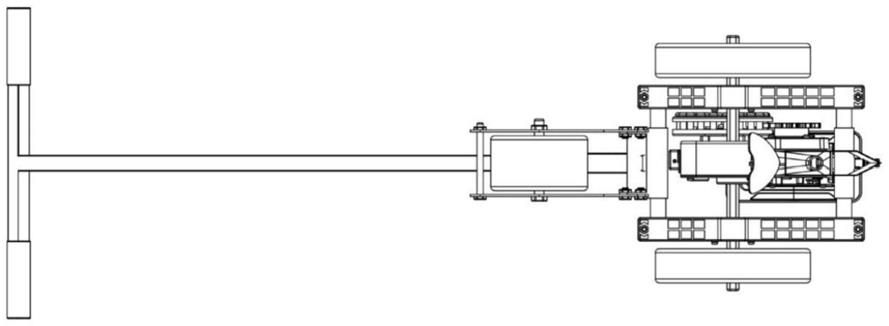
28.图1是依照本发明的现有技术中的条播机构的俯视示意图。
29.图2是依照本发明的基于间距辨识的覆土时机选择系统的定制条播机构的机架结构的外形结构图。
具体实施方式
30.条播机在工作前应及时向各注油点注油,保证运转零件充分润滑。丢失或损坏的零件要及时补充、更换和修复,注意不可向齿轮、链条上涂油,以免粘满泥土,增加磨损,条播机中,各排种轮工作长度相等,排量一致,播量调整机构灵活,不得有滑动和空移现象,圆盘开沟器圆盘转动灵活,不得晃动,不与开沟器体相摩擦,每班工作前后和工作中,应将各部位的泥土清理干净,特别注意清除传动系统上的泥土、油污,每班结束后应将化肥箱内的肥料清扫干净,以免化肥腐蚀肥料箱和排肥部位,检查排种轴及排肥轴是否转动灵活,每班作业后,应把条播机停放在干燥有遮盖的棚内。露天停放时,要将种肥箱盖严。
31.目前,在采用条播机执行对待播种农田的并排播种操作时,能够确定的是,在种子脱离条播机的各个播种口时,由于各个播种口是均匀间隔设置的,因此种子脱离位置具有均匀间隔,但由于风力的影响以及农田的崎岖地形等要素,导致并排脱落的多个种子实际落位的各个位置的间隔并不是均匀的,严重时会影响种子的发育和生长。
32.图1是依照本发明的现有技术中的条播机构的俯视示意图。
33.现在,将针对公开的主题对本发明进行具体的说明。
34.根据本发明实施方案示出的基于间距辨识的覆土时机选择系统包括:
35.定制条播机构,包括机架结构、嵌入式处理器、排种机构、开沟机构、覆土机构、划行结构和传动机构,所述机架结构的结构如图2所示;
36.其中,所述排种机构包括设置在与所述划行结构在待播种农田上划行方向垂直的横杆上的均匀间隔的多个播种口。
37.接着,继续对本发明的基于间距辨识的覆土时机选择系统的具体结构进行进一步的说明。
38.在所述基于间距辨识的覆土时机选择系统中:
39.所述嵌入式处理器用于在所述排种机构每完成一次并行排种操作后,根据接收到的实时间距标准差判断是否发出允许覆土指令或者禁止覆土指令。
40.在所述基于间距辨识的覆土时机选择系统中:
41.所述嵌入式处理器用于在所述排种机构每完成一次并行排种操作后,根据接收到的实时间距标准差判断是否发出允许覆土指令或者禁止覆土指令包括:当接收到的实时间距标准差高于等于预设标准差数值时,发出禁止覆土指令。
42.所述基于间距辨识的覆土时机选择系统中还可以包括:
43.视觉监视机构,设置在所述横杆上,与所述嵌入式处理器连接,用于在每接收到一次排种结束指令时,实现对所述横杆下方的已播种农田区域的视觉画面采集操作,以获得对应的播种区域画面;
44.种子鉴别设备,与所述视觉监视机构连接,用于基于待播种农田对应的播种种子的外形特征识别所述播种区域画面中的各个种子识别分块;
45.数值分析设备,与所述种子鉴别设备连接,用于针对每两个相邻的种子识别分块执行以下操作:获取所述两个相邻的种子识别分块分别对应的两个几何外形的两个形心,测量所述播种区域画面中所述两个形心之间最短距离经过的像素点的数目以作为所述两个相邻的种子识别分块对应的形心间距数值;
46.状态判断设备,与所述数值分析设备连接,用于获取所述播种区域画面中每两个
相邻的种子识别分块对应的形心间距数值以获得各个形心间距数值,并计算所述各个形心间距数值的标准差以作为实时间距标准差;
47.其中,所述嵌入式处理器用于在所述排种机构每完成一次并行排种操作后,根据接收到的实时间距标准差判断是否发出允许覆土指令或者禁止覆土指令包括:所述排种机构采用均匀间隔的多个播种口执行一次并行排种操作;
48.其中,所述排种机构采用均匀间隔的多个播种口执行一次并行排种操作包括:每执行一次并行排种操作,每一个播种口只推送出单颗种子到待播种农田上;
49.其中,所述排种机构每完成一次并行排种操作,向所述嵌入式处理器发送一次排种结束指令;
50.其中,所述覆土机构与所述嵌入式处理器连接,用于在每接收到一次允许覆土指令时,执行一次现场覆土操作。
51.在所述基于间距辨识的覆土时机选择系统中:
52.所述覆土机构还用于在每接收到一次禁止覆土指令时,暂停当前的一次现场覆土操作。
53.在所述基于间距辨识的覆土时机选择系统中:
54.所述种子鉴别设备、所述数值分析设备和所述状态判断设备都设置在所述机架结构上。
55.在所述基于间距辨识的覆土时机选择系统中:
56.所述状态判断设备还与所述嵌入式处理器连接,用于将所述实时间距标准差发送给所述嵌入式处理器。
57.在所述基于间距辨识的覆土时机选择系统中:
58.所述机架结构上设置所述嵌入式处理器、所述排种机构、所述开沟机构、所述覆土机构、所述划行结构和所述传动机构。
59.在所述基于间距辨识的覆土时机选择系统中:
60.所述嵌入式处理器用于在所述排种机构每完成一次并行排种操作后,根据接收到的实时间距标准差判断是否发出允许覆土指令或者禁止覆土指令包括:当接收到的实时间距标准差低于所述预设标准差数值时,发出允许覆土指令。
61.另外,在所述基于间距辨识的覆土时机选择系统中,还可以包括参数提取设备,分别与所述排种机构、所述开沟机构、所述覆土机构、所述划行结构和所述传动机构连接,用于分时获取所述排种机构、所述开沟机构、所述覆土机构、所述划行结构和所述传动机构各自的状态参数。
62.可不偏离所附权利要求中所定义的本发明的精神和范围,对优选的实施方案进行各种修改。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1