机器人园林工具系统及用于机器人园林工具的方法与流程
1.本发明涉及园林工具领域,更具体而言涉及机器人园林工具系统及用于机器人园林工具的方法,更特别涉及割草机器人及其控制方法。
背景技术:
2.随着技术发展,机器人园林工具得到了越来越广泛的应用。机器人园林工具不需要用户干预,可自行在预定工作区域进行工作,例如割草,这不但节省了人力,而且也允许用户有更多自主时间。
3.然而,机器人园林工具在工作过程中会遇到一些问题。比如工作区域的物理状况可能不理想,例如存在一些狭窄或受限区域,或者存在一些机器人园林工具难以克服的路况。这些物理状况会导致机器人园林工具在工作过程中卡住,从而无法继续完成工作。在现有系统中,可能需要人力干预,将其脱离卡住状态,然后使之继续自行工作。然而,这需要人力参与,并且延长了完成工作的时间,是不期望的。
技术实现要素:
4.针对现有技术的一个或多个缺点,本发明提供机器人园林工具系统及用于机器人园林工具的方法。
5.根据本发明的一方面,提供一种机器人园林工具系统。机器人园林工具系统包括机器人园林工具和边界模块。边界模块界定机器人园林工具的工作区域和/或非工作区域,边界模块包括至少一个边界元件,该至少一个边界元件限定工作区域和/或非工作区域的外围。机器人园林工具包括边界检测装置、卡住检测装置和控制装置。边界检测装置配置成检测至少一个边界元件,卡住检测装置与边界检测装置通信并且配置成基于边界检测装置的反馈信号si判断机器人园林工具是否卡住,控制装置配置成当机器人园林工具卡住时控制机器人园林工具进行摆脱操作。
6.备选地或额外地,边界模块包括信号产生单元,信号产生单元产生激励信号并将激励信号发送至至少一个边界元件,边界元件包括边界线,边界线接收到激励信号时产生边界信号,边界信号例如为电磁场。至少一个边界包括物理边界,例如栅栏、围墙等。
7.备选地或额外地,边界检测装置包括用于感应边界信号的信号接收模块,当信号接收模块感应到的边界信号强度大于强度阈值时,边界检测装置发出反馈信号si。
8.备选地或额外地,边界检测装置包括碰撞传感器,例如加速度计,当碰撞传感器感测到机器人园林工具与至少一个边界发生碰撞时,边界检测装置发出反馈信号si。
9.备选地或额外地,卡住检测装置接收反馈信号si,记录每个反馈信号si的发生时间ti,以及计算相邻两次反馈信号si和s
i+1
之间的时间间隔δti,卡住检测装置配置成基于时间间隔δti判断机器人园林工具是否卡住。
10.备选地或额外地,当时间间隔δti小于时间阈值时,卡住检测装置判定机器人园林工具卡住。
11.备选地或额外地,当n个连续时间间隔δti、δt
i+1
…
δt
i+n-1
均小于时间阈值时,卡住检测装置判定机器人园林工具卡住,其中n例如选自2至10中的一者。
12.备选地或额外地,当n个连续时间间隔δti、δt
i+1
…
δt
i+n-1
中的m个时间间隔均小于时间阈值时,卡住检测装置判定机器人园林工具卡住,其中n例如选自2至10中的一者,m例如选自2至9中的一者,且m《n。
13.备选地或额外地,机器人园林工具还包括轨迹记录装置,轨迹记录装置记录机器人园林工具的行进轨迹,摆脱操作包括令机器人园林工具沿记录的行进轨迹回退预定时间或预定距离,优选再偏转预定角度。
14.备选地或额外地,摆脱操作包括令机器人园林工具沿至少一个边界元件行进预定时间或预定距离,再偏转预定角度。可选地,预定时间为随机的时间,预定角度为随机的角度。
15.备选地或额外地,控制装置配置为当完成摆脱操作后一时间内再次检测到机器人园林工具卡住时向用户发出警报。
16.备选地或额外地,机器人园林工具是割草机器人。
17.根据本发明的另一方面,提供一种用于机器人园林工具的方法。该方法包括:检测边界模块的至少一个边界元件,边界模块界定机器人园林工具的工作区域和/或非工作区域,该至少一个边界元件限定工作区域和/或非工作区域的外围;基于检测产生反馈信号si;以及基于反馈信号si判断机器人园林工具是否卡住。
18.备选地或额外地,该方法还包括:当机器人园林工具卡住时控制机器人园林工具进行摆脱操作。
19.备选地或额外地,该方法还包括:产生激励信号并将激励信号发送至至少一个边界元件,其中,边界元件包括边界线,边界线接收到激励信号时产生边界信号,边界信号例如为电磁场。
20.备选地或额外地,该方法还包括以下项中的至少之一:当边界信号强度大于强度阈值时,产生反馈信号si;以及当机器人园林工具与至少一个边界发生碰撞时,产生反馈信号si。
21.备选地或额外地,该方法还包括:记录每个反馈信号si的发生时间ti;计算相邻两次反馈信号si和s
i+1
之间的时间间隔δti;以及基于时间间隔δti判断机器人园林工具是否卡住。
22.备选地或额外地,该方法还包括:当时间间隔δti小于时间阈值时,判定机器人园林工具卡住。
23.备选地或额外地,该方法还包括:当n个连续时间间隔δti、δt
i+1
…
δt
i+n-1
均小于时间阈值时,判定机器人园林工具卡住,其中n选自2至10中的一者。
24.备选地或额外地,该方法还包括:当n个连续时间间隔δti、δt
i+1
…
δt
i+n-1
中的m个时间间隔均小于时间阈值时,判定机器人园林工具卡住,其中n选自2至10中的一者,m选自2至9中的一者,且m《n。
25.备选地或额外地,该方法还包括:记录机器人园林工具的行进轨迹;以及令机器人园林工具沿记录的行进轨迹回退预定时间或预定距离,优选再偏转预定角度,优选地,预定时间为随机的时间,预定角度为随机的角度。
26.备选地或额外地,该方法还包括:当完成摆脱操作后一时间内再次检测到机器人园林工具卡住时向用户发出警报。
27.根据本发明的一个或多个实施例的机器人园林工具系统及用于机器人园林工具的方法具有多个技术优点。例如,根据本发明的一个或多个实施例的机器人园林工具可方便检测是否发生卡住,并且在卡住的情况下可有效摆脱卡住状态。例如,根据本发明的一个或多个实施例的机器人园林工具可避免关于卡住状态的误判断,可以对容易发生卡住的工作区域进行更有效的操作。再例如,根据本发明的一个或多个实施例的用于机器人园林工具的方法设计简单、独特、有效,可适用于工作区域中多种容易发生的卡住的区域的卡住检测。
28.本发明的更多实施例以及有益技术效果将在下文详述。
附图说明
29.图1a示出根据本发明一些实施例的机器人园林工具的示意图。
30.图1b示出图1a的机器人园林工具的一部分的底视图。
31.图1c示出图1a的机器人园林工具的另一些视图。
32.图2示出根据本发明的一些实施例的机器人园林工具及其工作区域。
33.图3示出根据本发明的一些实施例的机器人园林工具系统的模块框图。
34.图4示出根据本发明的一些实施例的机器人园林工具在工作区域及其卡住检测。
35.图5示出本发明的一些实施例的用于机器人园林工具的方法。
36.图6示出根据本发明的一些实施例的机器人园林工具的回归路线。
具体实施方式
37.为了便于理解本发明,以下将结合相关附图描述多个示例性实施例。
38.根据本发明的一方面,图1a-1c示出根据本发明的一些实施例的机器人园林工具100的示意图。机器人园林工具100可以是能够在不需要人工干预的情况下,自行在特定区域进行物理移动并对园林进行操作的园林工具。在一个或多个实施例中,机器人园林工具100例如是能够对草坪进行修剪的割草机器人。
39.在部分实施例中,如图所示,机器人园林工具100包括壳体101和设置在壳体101上的至少一个操作工具(例如割草工具)103a、103b。机器人园林工具100具有第一端或前端100a、第二端或后端100b、以及贯穿第一端100a和第二端100b延伸的纵向轴线或轴线l。
40.机器人园林工具100包括行走装置和动力装置。行走装置用于促进机器人园林工具100在物理表面沿特定方向的行走。作为示例,行走装置包括靠近第一端100a设置的前滚轮102a、102b以及靠近第二端100b设置的后滚轮104a、104b。
41.动力装置用于驱动行走装置。动力装置可以包括合适的动力源。作为示例,动力装置包括马达106a和106b。动力装置可以合适的方式驱动行走装置。在本实施例中,前滚轮102a、102b是尺寸较小的从动轮或脚轮,后滚轮104a、104b是尺寸较大的驱动轮。后滚轮104a被马达106a独立驱动,后滚轮104b被马达106b独立驱动。而前滚轮102a、102b不受马达106a和106b的直接驱动。在部分实施例中,前滚轮102a、102b还围绕相应枢轴可枢转地附接到机器人园林工具100的机架或底盘,其中当机器人园林工具在水平地面上运行时,该相应
枢轴基本上垂直于地面。前滚轮102a、102b可围绕其相应枢轴自由枢转,使得滚轮的滚动方向可以跟随机器人园林工具100的行进方向。
42.上述仅仅是行走装置和动力装置设计的示例。在其他实施例中,行走装置和动力装置可根据实际需要而以其他合适的方式设计。例如,行走装置可包括少于四个或者多于四个的滚轮,其中一个或多个或所有滚轮可以受动力装置的直接驱动。
43.在本实施例中,通常而言,当机器人园林工具100沿着图1a所示的轴线l方向行进时,可以称之为向前行进或前进,当机器人园林工具沿着与轴线l方向相反的方向行进时,可以称之为向后行进或后退。
44.图2示出根据本发明的一些实施例的机器人园林工具及其工作区域。机器人园林工具200例如可以是图1a-1c所例示的机器人园林工具100。
45.如图所示,边界22限定工作区域202,工作区域202之外的部分为非工作区域。期望的是,机器人园林工具200在工作区域202中工作,例如对其中的草坪进行修剪。该边界22仅是示意性的。实际中边界22的轮廓可以更为复杂和不规则。此外,可在一个主边界22限定的工作区域202内包括由一个或多个由次边界221限定的非工作区域203。或者说,该主边界22和次边界221一起限定了它们之间的工作区域202。
46.边界22、221可由一个或多个边界元件限定。边界22、221可以是虚拟边界。在某些实施例中,边界元件包括可产生边界信号的边界线。边界线可以设置成裸露在地表面,也可以掩埋在地下的一定深度,还可以一些部分裸露、另一些部分掩埋。边界线可以承载电或磁信号,在其周围产生电磁场,从而用于限定边界。在某些实施例中,边界元件包括可产生边界信号的至少一个信标,该至少一个信标产生电信号或磁信号以将其附近区域标记为例如非工作区域。在某些实施例中,边界元件包括在虚拟地图中标记出的虚拟位置信号,该虚拟地图可例如借助卫星或由其他方式绘制,而虚拟位置信号可手动或者以自动识别的方式产生并加载到虚拟地图中。其他形式的虚拟边界元件也是可能的,只要其能限定出工作区域和/或非工作区域即可。
47.边界22、211也可以是实体边界,例如物理边界。在某些实施例中,边界元件例如包括栅栏或围墙等。这些物理边界元件令机器人园林工具200无法通过。其他形式的实体边界元件也是可能的。
48.图3示出根据本发明的一些实施例的机器人园林工具系统的模块框图。
49.如所示,机器人园林工具系统包括机器人园林工具300和边界模块360。机器人园林工具300可以例如是图1a-1c所例示的机器人园林工具100或图2所例示的机器人园林工具200。
50.边界模块360界定机器人园林工具300的工作区域和/或非工作区域。边界模块360包括至少一个边界元件362,边界元件362限定工作区域和/或非工作区域的外围或边界。如上所述,边界可以是物理边界(例如栅栏、围墙等),也可以是虚拟边界,例如通过边界线、信标或者借助卫星装置界定的边界。
51.在某些实施例中,边界模块360还包括信号产生单元364,例如信号发生器。信号产生单元364能产生激励信号并将激励信号送至边界元件362。例如,在某些实施例中,边界元件包括边界线。信号产生单元产生电流作为激励信号,电流流过边界线,产生电磁场作为边界信号。沿着边界线,电磁场信号较强,远离边界线,电磁场信号较弱。机器人园林工具可通
过侦测电磁场信号的强度来判定距离工作区域的边界的相对远近。也即,携带电磁场信号的边界线界定了机器人园林工具的工作区域或非工作区域的外围或边界。不同的边界元件可产生不同的边界信号,以区别工作区域和非工作区域。
52.机器人园林工具300包括边界检测装置310、卡住检测装置320、和控制装置340。这些装置可分别提供,或整合在同一电路模块中。
53.边界检测装置310能检测边界元件362。在部分实施例中,边界设置为虚拟边界,例如边界线、信标、借助卫星装置界定的边界等。边界检测装置310例如可包括信号接收模块312。信号接收模块312例如包括设置在机器人园林工具300的机架或底盘或其他合适位置的一个或多个传感器。在某些实施例中,信号接收模块312是电磁信号传感器,其能够感应边界模块360产生的边界信号。当信号接收模块312感应到的边界信号(例如磁场信号)强度大于强度阈值(例如预定的磁场强度)时,边界检测装置310产生或发出反馈信号si。在某些实施例中,信号接收模块312是位置传感器,其能够检测并判断与虚拟边界的距离。当该距离小于距离阈值时,边界检测装置310产生或发出反馈信号si。信号接收模块312对边界的感测不需要机器人园林工具300必然与边界模块360的一部分(例如边界元件362)物理接触或者在物理上与边界产生交叠,当然也不排除与其一部分的物理接触或交叠。
54.在某些实施例中,边界设置为物理边界,例如围墙、栅栏等。边界检测装置310还包括碰撞传感器314,例如加速度计。当碰撞传感器314感测到机器人园林工具300的一部分(例如前端)与边界发生碰撞时,边界检测装置310发出反馈信号si。
55.在某些实施例中,边界检测装置310产生或发出反馈信号si为连续信号而非离散信号。该连续信号包括超越阈值的部分和低于阈值的部分。
56.卡住检测装置320与边界检测装置310通信。本发明的发明人首先意识到,可以基于边界检测装置310产生的反馈信号si的规律来检测和判断机器人园林工具300是否卡住。这种检测和判断方式不需要为机器人园林工具300提供额外的传感器或设备,而只需依赖现有的电磁信号传感器、位置传感器或加速度传感器即可。因此,本发明以低成本且可靠的方式实现了机器人园林工具300是否卡住的检测和判断。
57.在某些实施例中,卡住检测装置320接收到每个反馈信号si时,记录该反馈信号si的发生时间ti。卡住检测装置320计算相邻两次反馈信号si和s
i+1
之间的时间间隔δti,并且基于时间间隔δti判断机器人园林工具300是否卡住。或者,卡住检测装置320并不记录反馈信号si的决定发生时间ti,而只记录相邻两次反馈信号si和s
i+1
之间的相对时间间隔δti。例如,在某些实施例中,当时间间隔δti小于时间阈值时,卡住检测装置320判定机器人园林工具300卡住。在还有一些实施例中,当n个连续时间间隔δti、δt
i+1
…
δt
i+n-1
均小于时间阈值时,卡住检测装置320判定机器人园林工具300卡住。例如,n选自2至10中的一者,例如是2、3、4、5、6、7、8、9、10。在另有一些实施例中,当n个连续时间间隔δti、δt
i+1
…
δt
i+n-1
中的m个时间间隔均小于时间阈值时,卡住检测装置320判定机器人园林工具300卡住,例如,n选自2至10中的一者,例如是2、3、4、5、6、7、8、9、10,m选自2至9中的一者,例如是2、3、4、5、6、7、8、9,且m《n。该时间阈值可例如根据机器人园林工具300的行进速度、工作区域的大小等因素预先设定或由用户选择性设备。在部分实施例中,该时间阈值例如为5-120秒,10-90秒、20-60秒、30秒等。
58.在反馈信号si为连续信号而非离散信号的情形中,本领域技术人员基于本说明书
的描述知晓应当如何配置机器人园林工具来处理该连续信号。例如卡住检测装置320接收该连续反馈信号si,并记录该反馈信号si每次超过阈值的时间ti。其他的细节在此不再赘述。
59.当卡住检测装置320判定机器人园林工具300卡住时,其与控制装置340通信。当机器人园林工具300卡住时,控制装置340控制机器人园林工具300进行摆脱操作。该摆脱操作可为预定操作中的一种或多种,例如后退、转弯、或者沿着特定路线行走等。在某些实施例中,机器人园林工具还包括轨迹记录装置330。轨迹记录装置330能够记录机器人园林工具300的行进轨迹。该行进轨迹可例如表征为基于卫星导航获得的移动轨迹,也可表征为动力装置在一段时间内的工作状态。摆脱操作例如包括令机器人园林工具300沿记录的行进轨迹回退预定时间(例如10-180秒,30-150秒、60-120秒等)或预定距离(例如0.5-20米、1-15米、2-10米、5米等),并且可选地,在继续行进之前偏转预定角度(例如10-180度、20-150度、30-90度、60度等)。在某些实施例中,摆脱操作包括令机器人园林工具300沿至少一个边界元件(例如边界线)行进预定时间(例如10-180秒、30-150秒、60-120秒等)或预定距离(例如0.5-20米、1-15米、2-10米、5米等),并且可选地,在继续行进之前偏转预定角度(例如10-180度、20-150度、30-90度、60度等)。在某些实施例中,上述预定时间可以为随机的时间,上述预定距离可以是随机距离,上述预定角度可以为随机的角度。
60.在某些实施例中,控制装置340还包括报警装置,例如声音报警器。当完成摆脱操作后一时间内(例如30-180秒、60-120秒等)再次检测到机器人园林工具300卡住时向用户发出警报,提醒用户处理。这在一些情况下是有利的。通常而言,机器人园林工具摆脱卡住之后,如果在特定时间内再次卡住,可能指示该区域较难自行摆脱,因此可求助于人工干预,例如人员去将机器人园林工具移位。
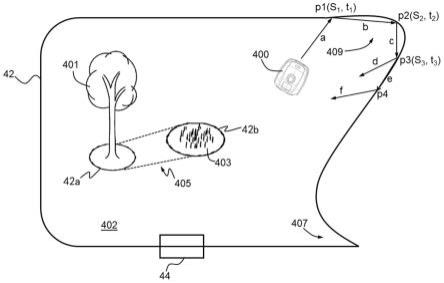
61.图4示出根据本发明的一些实施例的机器人园林工具在工作区域及其在工作区域中是否卡住的检测。机器人园林工具400可以例如是图1a-1c所例示的机器人园林工具100或图2所例示的机器人园林工具200或图3所例示的机器人园林工具300。
62.如所例示,边界模块包括边界线42和信号产生单元44。信号产生单元44例如是产生激励电流(激励信号的示例)的电流发生器。边界线42例如是承载激励电流的导线,其接收激励电流并且产生边界信号。边界线42界定工作区域402的边界。尽管信号产生单元44例示为位于边界上,这并不是必须的。在某些实施例中,信号产生单元44可位于边界之外或者之内,然后与边界线42电学连接。
63.边界信号可以是合适的类型,例如是具有特定频率、特定波形(例如正弦波、余弦波、方波等、或一个或多个波形的叠加)的信号。边界信号可以是信号产生单元44发射的发射信号和辅助信号的交替出现或叠加。边界信号还可以是信号产生单元44发射的发射信号和空置信号的交替出现而呈现的周期性或非周期性信号。边界信号也可以是信号周期和/或相位随时间变化的信号。边界信号还可以是一个或多个不同的发射信号的交替出现或叠加。机器人园林工具400可对边界信号进行处理,例如放大、滤波、调相之类。
64.例如,在某些实施例中,在53hz的频率下,边界线42发出4槽方波信号(1,1,-1,1),紧接着是279个空槽。机器人园林工具持续检测信号,每300个时隙捕获一次信号,并且过滤信号以检测是否有边界信号以及边界信号的强度和相位。
65.工作区域402中可能存在不期望的物体,例如一个或多个树401、一个或多个其他
类障碍物(例如石堆)403等。边界模块也可包括界定这些不期望的物体的边界的边界元件,其在本实施例中例示为边界线42a和42b。此外,在工作区域402还存在一些容易使得机器人园林工具400卡住的区域,例如树401与障碍物403之间的区域405、第一角区域407、和第二角区域409等。
66.现有的系统往往无法侦测工作区域中存在的障碍物,或者在机器卡住的情况下需要等待人员去处理,这是不利的。为了解决这些问题,图4例示了针对机器人园林工具400在第二角区域409卡住的判断和处理。如所示,例示了针对机器人园林工具400沿着方向a(箭头指示,下同)行进到p1位置,机器人园林工具400的边界检测装置发出反馈信号s1,其卡住检测装置接收反馈信号s1并且记录时间t1。反馈信号s1的触发可以是由于机器人园林工具感测到的边界信号(在本实施例中为磁场信号)大于强度阈值(在本实施例中为预定磁场强度),也可以是由于机器人园林工具感测到其自身与边界线42发生碰撞或交叠。此外还要理解的是,尽管p1位置例示为位于边界线42所界定的边界上,这并不是必须的,p1位置可能位于边界内侧的一定距离,只要在该距离机器人园林工具感测到的边界信号达到一定值即可。这类似地适用于下文将要例示的p2位置和p3位置。
67.到达p1位置之后,机器人园林工具400可按照既定规划沿着方向b行进。例如,机器人园林工具400可转向一定角度,或者先退后一定距离或时间,再转向一定角度,然后沿着方向b行进。当机器人园林工具400行进至p2位置时,机器人园林工具400的边界检测装置发出反馈信号s2,其卡住检测装置接收反馈信号s2并且记录时间t2,并且计算机器人园林工具400从p1位置行进至p2位置的时间差δt1=(t
2-t1)。反馈信号s2的触发条件可类似于反馈信号s1的触发条件,也可以有所不同。
68.到达p2位置之后,机器人园林工具400可按照既定规划沿着方向c行进。当机器人园林工具400行进至p3位置时,机器人园林工具400的边界检测装置发出反馈信号s3,其卡住检测装置接收反馈信号s3并且记录时间t3,并且计算机器人园林工具400从p2位置行进至p3位置的时间差δt2=(t
3-t2)。反馈信号s3的触发条件可类似于反馈信号s1或s2的触发条件,也可以有所不同。
69.在本实施例中,当δt1和δt2均小于时间阈值(例如60秒)时,机器人园林工具400的卡住检测装置判定机器人园林工具400卡住,然后其控制装置指示机器人园林工具400沿着预定路线或方向(在本实施例中为沿着与边界重合的方向e)行进预定时间或预定距离达到p4位置,由此摆脱卡住状态。在p4位置,机器人园林工具400以偏向工作区域402的侧转向一定角度(该角度可能是预定的,例如30度,也可以是随机生成的),然后继续行进进行正常工作。
70.如果δt1和δt2中至少其一大于或等于时间阈值(例如60秒)时,机器人园林工具400的卡住检测装置则判定机器人园林工具400没有卡住。在p3位置,机器人园林工具400将例如沿着方向d行进并且继续进行正常工作。
71.在某些实施例中,当δt1小于时间阈值时,机器人园林工具400的卡住检测装置就判定机器人园林工具400卡住,然后在p2位置就开始摆脱操作。
72.图4仅例示了在三个位置(p1位置、p2位置、p3位置)产生触发信号。在某些实施例中,可能会在更多个位置,例如5个位置、10个位置、15个位置产生触发信号。例如,在某些实施例中,可能连续5个、8个、甚至更多个时间间隔均小于时间阈值时,才判定机器人园林工
具卡住。这在某些情况下是有利的。例如可以减少误判断。在某些情况下,例如,预先设定必须连续7个时间间隔均小于时间阈值才判定机器人园林工具发生卡住,而机器人园林工具可能在连续前6个时间间隔均小于时间阈值之后就自行摆脱了容易卡住的区域。这也指示在这种情况下,可能并不需要人工干预,因为机器人园林工具可经过自身的调整之后,自行摆脱卡住状态。如果将时间间隔小于时间阈值的数目设置过小,则会将其判定为卡住状态,然后机器人园林工具就会启动摆脱操作离开所在的区域,而不再对所在区域进行操作,甚至会引入其实并不必要的人工干预。也即,设置连续多个时间间隔均满足小于时间阈值这一判定条件可促进机器人园林工具在容易卡住的区域工作尽可能长的时间,有利于对此类区域进行更好的操作(例如除更多的草)。
73.此外,结合图4所叙述的预定角度、预定时间、预定距离,可以是预先设置的,也可以是随机生成的。在某些情况下,采用随机生成的角度、时间、距离是有利的。以机器人园林工具沿着方向e从p3位置行进至p4位置为例,由于行进的时间或距离是随机生成的,p4位置由此是随机的,这有利于机器人园林工具从边界上不同的位置向工作区域侧行进,因此,工作区域内的操作对象(例如草坪)可得到更均匀的操作。机器人园林工具在p4位置转向随机角度也促进了这一有利效果。
74.图5示出本发明的一些实施例的用于机器人园林工具的方法。该方法例如可由根据图1a-1c所例示的机器人园林工具100、或图2所例示的机器人园林工具200、或图3所例示的机器人园林工具300、或图4所例示的机器人园林工具400执行。
75.如所示,在框510,检测边界模块的至少一个边界元件。例如,可由机器人园林工具的传感器检测携带电信号的边界线产生的电磁场,或者检测由信标、卫星装置等合适信号源创建的边界信号。
76.在框520,基于检测产生反馈信号si。反馈信号si的产生基于预定的触发条件(例如检测到的边界信号达到一定阈值、或者与边界元件或边界产生碰撞、交叠等),并且指示机器人园林工具已经进入预定的边界区域。预定的边界区域可以是与边界的距离小于预定值,或者发生交叠(例如机器人园林工具的前端与边界碰触或交叠)。
77.在框530,判断机器人园林工具是否发生卡住。这可以例如通过结合图3或图4所例示的系统或方法判定,尽管其他的判定方法也是可能的。如果判定发生卡住,则流程进行至框540,进行摆脱操作。摆脱操作可以是使得机器人园林工具沿着预定方向或预定路线回退或行进预定时间或预定距离,并且可选地,随之偏转预定角度。如果在框530判定没有发生卡住,则流程进行至框550,机器人园林工具继续行进。
78.图6示出根据本发明的一些实施例的机器人园林工具的回归路线。如所示,边界线62限定工作区域602。机器人园林工具600可在工作区域602工作。图6还示出了充电站68,充电站68可包括用于产生信号的信号产生单元(未示出)。
79.机器人园林工具600的电池的电量低于一定水平时,机器人园林工具600需要回归至充电站68充电。在一些实施例中,机器人园林工具600在需要充电时,会沿着边界线62(第一回归路线)回归至充电站68。
80.在某些实施例中,在需要充电时,机器人园林工具600会沿着不同于第一回归路线的第二回归路线回归至充电站68。第二回归路线可以包括与边界线偏离预定距离的路线、也可以是与边界线偏离变化距离的曲线路线、或其组合。第二回归路线可为许多不同轨迹
的上述路线的组合。在每次回归操作时,机器人园林工具600以此或随机选择其中的一条路线。第二回归路线还可以是一个随机路线。作为一个示例,图6示出了其中一条第二回归路线66。
81.在某些情况下,采用第二回归路线是有利的。例如可避免机器人园林工具每次沿着边界线回归造成的对该同一路线上的草地的过度破坏或损伤。在湿度较大的地表环境,机器人园林工具沿着固定路线产生的破坏可能是显著的。根据图6所示的第二回归路线可避免或缓和此类不利。
82.第二回归路线可以是预先设定的。在还有一些实施例中,第二回归路线是随机生成的。随机生成的第二回归路线,可进一步缓和对工作区域产生的破坏或损伤。
83.本领域技术人员要理解的是,本文实施例仅出于例示本发明的目的,而决非对本发明的限制。例如,附图只是例示性的,其中的要素并非必然按照实际比例示出。一个附图可能示出多个要素。本领域技术人员要理解的是,这仅是出于简洁的目的,并不表示每个要素都是必须的。本领域技术人员将理解的是,同一个附图中的一个或多个要素可能是备选的或额外的要素。
84.本领域技术人员还要理解的是,以上实施例试图从不同方面例示本发明的一个或多个思想,它们并非是孤立的;而是,本领域技术人员可根据上述示例,将不同实施例进行适当的组合,以得到其他的技术方案示例。
85.除非另外限定,本文所使用的技术和科学术语具有作为本发明所属领域的普通技术人员通常所理解的相同的含义。在非限定性实施例中例示了本发明的实施方式。在上述公开的实施例的基础上,本领域技术人员能想到的各种变型,都落入本发明的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1