一种单电机驱动的旋转采摘末端执行器
1.本发明属于采摘机器人技术领域,是用于类球形、使用旋转分离采摘方式进行采摘的果实采摘机器人末端执行器,涉及一种单电机驱动的旋转采摘末端执行器。
背景技术:
2.随着现代植物大棚、植物工厂等果蔬种植技术的提高,为机器人智能采摘提供了可实现的采摘环境,全球多个国家进行了果蔬采摘机器人的研制与开发,采摘机器人末端执行器是采摘机器人研究的重点之一。常见的果蔬采摘机器人末端执行器根据抓取动力方式分为电磁式、电动式和气动式等。根据抓取方式分为软体抓取式、真空吸盘式、夹爪抓取式等。果梗分离方式分为切割式和旋转分离式,切割式分离方法首先抓取目标果实,然后使用剪刀等对果梗进行切割达到果梗分离的目的;扭转分离式方法使用末端执行器抓紧果实,再通过旋转果实的方式实现果实与果梗的分离。
3.由于田间植株种植距离近,机器人可操作空间小,如果采摘机器人末端执行器结构庞大,采摘机械臂难以实现路径规划致使抓取失败,并可能碰撞植株造成破坏。另一方面,采摘机器人末端负载有限,只有降低末端执行器负载才能留有足够的负载进行果实抓取。使用旋转进行果梗分离的方式需要采摘机器人末端执行器能够进行多圈旋转,保证果实能够实现分离。但当前已有的采摘末端执行器都存在体积较大,或不能实现多圈旋转功能,其原因都是因为一个末端执行器安装多个驱动装置来分别实现末端执行器的抓取和分离功能。多个驱动装置导致末端执行器本身体积增大,且整体受电源传输线的影响,运动受到限制,难以实现多圈旋转。如专利号为cn201310341023.4的发明专利“一种猕猴桃果实采摘末端执行器”,其夹持机构和旋转采摘机构为分离设计,分别使用2个电机进行驱动,整体结构庞大,且末端执行器由于线缆问题不能实现对果实的多圈旋转分离。
技术实现要素:
4.针对当前采摘机器人末端执行器体积庞大、结构复杂、旋转时会造成线缆缠绕的问题,采用单电机驱动加机械结构传动的方式实现末端执行器的抓取和多圈旋转功能,以简化采摘机器人末端执行器结构,降低采摘机器人末端负载,提高采摘机器人采摘成功率。
5.本发明解决技术问题采用的方案如下:
6.一种单电机驱动的旋转采摘末端执行器,包括抓取叶片、旋转架、转子、步进电机、夹爪叶片。
7.所述抓取叶片分为两部分,上半部分为抓取部分,曲率10m-1
的弯曲叶片,以贴合果实圆形的外表形状,表面附着软体材料避免对果实造成破坏。抓取叶片下半部分为固定安装部分,其上部通孔为安装孔,表面凸起部分为限位架。
8.所述旋转架为圆形支架,是整个末端执行器核心零件,其上开有三个开口,用于安装抓取叶片;开口旁设置的挡板为推力板,用于转子推动旋转架旋转;旋转架中央开有通孔用于穿过电机轴,其旁边开设圆形凹槽用于安装推力轴承;
9.所述转子包含三个长方体旋转轴,旋转轴末端的轴向和径向上分别设置为斜面用于拨动抓取叶片。
10.所述步进电机安装架为长方体壳体,其上部开有通孔用于穿过电机轴,通孔旁的圆形凹槽用于安装阻尼轴承;顶部开设四个通孔用于步进电机的安装固定,侧面四个通孔用于与底部安装法兰连接。
11.所述夹爪叶片通过螺栓安装到旋转架上,并在抓取叶片安装孔和旋转架间安装扭簧,使其在没有受力的自然状态下处于张开的状态。步进电机通过步进电机安装架上的通孔与自身螺纹孔进行安装固定,在步进电机架的顶部安装阻尼轴承后通过旋转架的中央通孔穿过旋转架后分别在电机轴上安装电机滚子轴承和推力轴承。推力轴承上方通过电机轴安装转子,并最后通过止推环进行固定,达到轴向定位的效果,使电机安装架与旋转架完成连接。由于在旋转架与转子之间安装有推力轴承,旋转架与电机主轴间安装有滚动轴承,保证了电机在旋转时只要转子不与旋转架上的推力板接触则旋转架保持静止。旋转架与电机支架间安装的阻尼轴承确保了转子在推动抓取叶片时不会带动旋转架旋转。
12.采摘末端执行器共有三个状态:开启、闭合和旋转。当转子叶片处于不与抓取叶片接触的位置时,抓取叶片在扭簧的作用下保持打开的状态,且其表面的限位架与末端执行器顶盖接触,保证抓取叶片下半部分与抓取顶盖间留有足够空隙,确保转子后续能够与抓取叶片下半部分接触并推动抓取叶片闭合。当启动步进电机令其正向低速旋转80度并保持不动,则末端执行器处于闭合状态,此过程中当转子旋转至60度时转子与抓取叶片下半部分接触,转子通过继续旋转,转子的叶片末端的斜面将对抓取叶片下半部分方施加向下的压力,最终在转子旋转至80度时将抓取叶片的下部推至竖立状态,使末端执行器转换为闭合状态,此过程中会对转子叶片产生少量的切向推力,但是旋转架与电机间安装架间安装的阻尼轴承会产生相应的阻力使旋转架保持静止。当转子旋转80度时,转子叶片与旋转架上的推力板接触,此时若继续使步进电机进行旋转,则末端执行器进入第三个状态,即果实旋转分离状态。转子通过推动推力板使整个旋转架进行旋转,在其上安装的抓取叶片也随之旋转,果实在抓取叶片的抓取下进行旋转,以达到果梗分离的目的。在果实释放时,使步进电机逆转80度,此时转子与抓取叶片脱离接触,抓取叶片在扭簧的作用下打开,使末端执行器达到开启的状态。
13.本发明末端执行器使用单电机驱动的方式实现了末端执行器抓取叶片的闭合和旋转,大幅缩小了末端执行器的体积和重量,使得采摘机器人更加灵活,提高了采摘机器人在狭小工作空间的采摘成功率。由于本发明末端执行器采用单电机驱动,其没有大量的线缆干扰,旋转时不需考虑线缆缠绕的问题,可以实现无限多圈旋转,达到更有效的果梗分离。简化了末端执行器结构,降低了成本。
附图说明
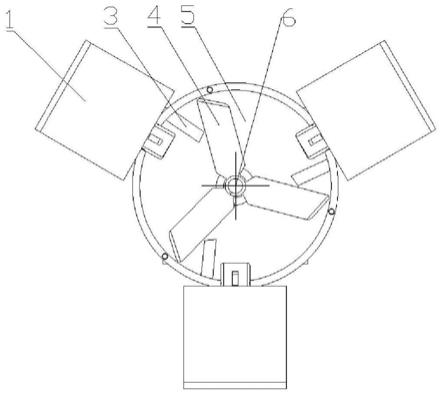
14.图1为本发明的末端执行器俯视图;
15.图2为转子叶片位于初始位置0度时、末端执行器去除顶盖的俯视图;
16.图3为转子叶片位于80度时、末端执行器去除顶盖的俯视图;
17.图4为图1的a-a剖视图;
18.图5为末端执行器前视图;
19.图6为抓取叶片前视图和侧视图;
20.图7为转子三视图。
21.图中:1抓取叶片;2顶盖;3推力板;4转子;5旋转架;6步进电机;7止推环;8推力轴承;9滚子轴承;10阻尼轴承;11电机安装架12安装法兰;21抓取叶片抓取部分;22抓取叶片限位架;23抓取叶片安装部分;24抓取叶片安装孔;25抓取叶片扭簧安装孔。
具体实施方式
22.本末端执行器使用步进电机与旋转架分离设计,使得步进电机的不同运动可以实现多种功能。当安装于步进电机主轴上的转子处于初始位置时,抓取叶片在扭簧的作用下处于开启状态,如图2所示;当转子正向旋转(图2中顺时针旋转)80度时将推动抓取叶片闭合,如图3所示;当转子继续进行正向旋转将推动推力板使旋转架和抓取叶片旋转;当转子逆时针旋转80度回到初始位置,则抓取叶片在扭簧的作用下打开。
23.步进电机6通过螺钉与电机安装架11进行固定,安装法兰12通过螺钉与电机安装架11进行固定并通过螺钉与外部设备连接。阻尼轴承10安装于电机安装架顶部,阻尼轴承10内圈与电机安装架过盈装配,与旋转架5外圈过盈装配。电机轴通过旋转架5中心通孔穿过旋转架5,并在电机轴上安装滚子轴承9减小步进电机6转动时与旋转架5之间的摩擦,同时给旋转架5提供径向支撑。推力轴承8通过电机6传动轴安装于旋转架5上,其上安装转子4,转子4上方安装推力环7对其进行轴向固定。抓取叶片1通过安装孔24安装在旋转架5上,并在其中安装扭簧,扭簧一端固定在抓取叶片扭簧安装孔25中,一端固定在旋转架5上,扭簧使抓取叶片1的初始位置处于打开的状态。抓取叶片1的抓取部分21表面附着有柔性材料,避免抓取损伤。旋转架5顶部安装顶盖2,对旋转架5内部进行保护并对抓取的果实进行支撑。
24.如图2所示,当转子位于初始位置0度时,抓取叶片1在扭簧的作用下处于开启状态,限位架22与顶盖2接触,避免抓取叶片1开启角度过大,以便于后续转子4对抓取叶片1进行接触。当末端执行器需要进行抓取时,令步进电机6进行慢速正向(图2中顺时针方向)80度旋转,由于滚子轴承9和推力轴承8的存在,步进电机6主轴、转子4与旋转架5之间摩擦较小,且阻尼轴承10增大了旋转架5与电机安装架11之间的阻力,使得步进电机6主轴和转子4的旋转不会带动旋转架5的旋转。当转子4旋转至70度时与抓取叶片1底部相接触,如图七所示,由于转子4为斜面设计,其会对抓取叶片1产生向下的推力,使抓取叶片1逐步闭合,最后当转子旋转至80度时,如图3所示,此时抓取叶片1在转子的作用下完全闭合,且与推力板3进行接触,此时末端执行器完成抓取任务。为了实现果实的果梗分离,令步进电机6继续进行正向旋转,此时转子4推动推力板3使旋转架5进行旋转,则安装在旋转架5上的抓取叶片1同时进行旋转,使抓取的果实旋转并最终达到果梗分离的效果。当果梗分离完成后,使转子4保持在80度位置不动,采摘机器人将末端执行器规划至水果放置区域,此时令步进电机6反向旋转80度,转子4不再对抓取叶片1产生推力,抓取叶片1在扭簧的作用下打开释放果实。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1