一种应用于大草原的安防放牧设备及其放牧方法
1.本发明涉及安防放牧技术领域,特别是涉及一种应用于大草原的安防放牧设备及其放牧方法。
背景技术:
2.目前大草原放牧区的牧羊和牧牛、检测天气变化和养殖场的巡逻主要靠人工完成。在每一个大规模的养殖场内都会配有很多放牧人和巡逻人,特别是在草原进食或者夜晚,养殖场需要人员介入巡逻来进行安防和查看羊群正常的健康特征。对于大规模的养殖场,安防巡逻人员无法细微的观察到每只牲畜的状态特征,且消耗了巨大的人力和物力。即使对于安装有摄像头的场区,监控人员在监控画面中也很难细微的监控到牲畜的状态特征,难以实现有效的安全防护工作。最重要的是在大草原中进行放牧时,人工很难精确预测天气的变化、有效监控牧群的动态以及抵御外部物种的威胁,畜群难以达到安全高效的进食。
技术实现要素:
3.本发明的目的是针对现有技术中存在牧区牲畜以及威胁动物难以实时监测的问题,而提供的一种大草原的安防放牧设备。
4.本发明的另一目的,提供一种所述安防放牧设备的放牧方法。
5.为实现本发明的目的所采用的技术方案是:
6.一种应用于大草原的安防放牧设备,包括受底盘控制系统驱动的移动装置、装配于所述移动装置上的中控机和给用电部件电连接的供电装置、以及通过无线通讯机构与所述中控机通讯连接的远程控制端;
7.所述移动装置上还装配有信息采集器、电子炮警示器和组合惯导,所述信息采集器包括用于采集动物图像信息、障碍物信息的摄像头和雷达,所述摄像头和雷达分别与所述中控机通讯连接,所述中控机与发出警示音的所述电子炮警示器通讯连接,所述中控机与用于定位的所述组合惯导通讯连接。
8.在上述技术方案中,所述移动装置包括移动底盘、通过单摇臂独立悬挂结构装配于所述移动底盘下方的四个充气胶轮,每一所述充气胶轮由一个直流无刷伺服电机驱动,所述直流无刷伺服电机与底盘控制系统通讯连接,所述底盘控制系统与所述中控机通讯连接,每一个所述单摇臂独立悬挂结构上装配一个伸缩管式前叉液力减震器,所述直流无刷伺服电机与所述供电装置电连接。
9.在上述技术方案中,所述摄像头包括rgb摄像头和长波红外摄像头,所述雷达包括毫米波雷达、超声波雷达、激光雷达。
10.在上述技术方案中,所述中控机的型号为nuvo-6108gc,所述组合惯导通过串口与所述中控机进行通讯,所述超声波雷达通过串口与所述中控机通讯,所述毫米波雷达通过db9与所述中控机进行通讯,所述激光雷达通过网口与所述中控机进行通讯,所述长波红外
摄像头和rgb摄像头通过usb与所述中控机连接且通过yolov3检测算法来识别环境中的障碍物或危险物种,所述中控机通过航空插头与所述底盘控制系统进行通讯,所述中控机通过usb与电子炮警示器进行通讯。
11.在上述技术方案中,所述移动底盘还设有与所述中控机通讯连接的烟雾传感报警器、温度传感器和天气监控装置。
12.在上述技术方案中,所述烟雾传感报警器和温度传感器通过rs485转换成usb与所述中控机进行通讯,所述天气监控装置通过无线网与所述中控机进行通讯。
13.在上述技术方案中,所述移动底盘左右两侧安装有紧急停车开关,所述紧急停车开关与连接所述直流无刷伺服电机的驱动电机总电通过电连接。
14.在上述技术方案中,所述供电装置包括太阳能电池板、电池组、变压器和逆变器,所述太阳能电池板和电池组通过插排与所述变压器电连接,所述变压器与所述中控机电连接,所述变压器通过逆变器与装配于所述移动装置上的组合惯导、超声波雷达、毫米波雷达、激光雷达、烟雾传感报警器、电子炮警示器、温度检测装置和天气监控装置电连接。
15.本发明的另一方面,所述安防放牧设备的放牧方法,包括以下步骤:
16.组合惯导的定位信息发送给中控机,中控机给所述移动装置发送运动轨迹,所述移动装置移动至相应的位置,摄像头采集动物的图像信息发送给中控机,中控机将对图像信息进行处理,若检测到图像信息中存在危害畜牧群的物种时,则中控机通过无线通讯机构向远程控制端发送警报信息,并控制电子炮警示器发出警示音,雷达采集障碍物信息传输给中控机,若检测到障碍物时,移动装置停止运动。
17.在上述技术方案中,温度检测装置和天气监控装置检测到恶劣的天气时,将信息传递给所述中控机,所述中控机向远程监控端发出警告;
18.摄像头和烟雾传感报警器将检测到信息传输至中控机分析处理,并将分析结果通过无线通信机构输送至远程监控端。
19.与现有技术相比,本发明的有益效果是:
20.1.本技术在草原进食或者夜晚可代替人巡逻来进行安防,实时采集牧场的图像信息,对图像信息进行处理,可识别图像中具有危害性的动物,并通过电子炮警示器进行驱除,同时也可以查看羊群正常的健康特征,可细微的观察到每只牲畜的状态特征,减少人力和物力的消耗。可以对牧场实现有效的安全防护工作。
21.2.本发明采用轮式移动合金底盘,采用草地防滑橡胶轮胎与伸缩管式前叉液力减震器、独立悬挂的联合设计,与履带式移动底盘相比其速度更快,减震效果更佳,效率更高,运动噪声低,可在放牧环境中正常运行。所述动力系统中的驱动模块采用直流无刷伺服电机,运行效率高,速度控制精确,转矩特性良好,拥有较好的线性调节控制特性,敏捷的时间响应性能,低能耗和寿命长。
22.3.本发明通过rgb摄像头、红外长波摄像头、烟雾传感报警器和天气监控装置的配合使用,不仅可以实时的检测畜牧群夜晚与白天的状态情况,还可以实时监控天气变化情况和实时的检测火灾险情。融合激光雷达、rgb摄像头、红外长波摄像头、超声波雷达和毫米波雷达进行感知识别,利用激光雷达、超声波雷达和毫米波雷达极强的抗干扰能力、获取丰富的信息量和可全天时工作。有效的加强了该机器人的安全可靠性。利用rgb摄像头和红外长波摄像头可以更佳精确的识别障碍物的姿态特征,有利于更好的预警。
附图说明
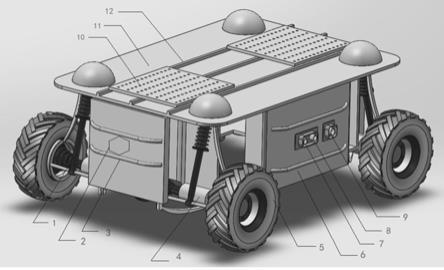
23.图1所示为移动底盘前部视图。
24.图2所示为各部件连接原理图。
25.图3所示为底盘顶部面板及其安装部件的结构示意图。
26.图4所示为顶部安装平台隔板及其安装部件的结构示意图。
27.图中:1-伸缩管式前叉液力减震器,2-毫米波雷达,3-前部防撞安全管,4-直流无刷伺服电机,5-充气胶轮,6-能源仓,7-外部扩展连接口,8-车辆充电连接口,9-紧急停车开关,10-底盘顶部固定板,11-底盘顶部面板,12-铝合金连接支架,13-转接线板,14-组合惯导,15-中控机,16-操作台,17-无线路由器,18-变压器,19-逆变器,20-元器件安装隔板,21-超声波雷达,22-顶部安装平台隔板,23-激光雷达,24-rgb摄像头,25-长波红外摄像头,26-天气监控装置,27-显示器,28-电子炮警示器,29-太阳能电池板,30-温度传感器,31-烟雾传感报警器。
具体实施方式
28.以下结合具体实施例对本发明作进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
29.实施例1
30.一种应用于大草原的安防放牧设备,如图1-2所示,包括受底盘控制系统驱动的移动装置、装配于所述移动装置上的中控机15和与用电部件电连接的供电装置、以及通过无线通讯机构与所述中控机15通讯连接的远程控制端,所述受底盘控制系统与所述中控机15通讯连接;
31.所述移动装置上还装配有信息采集器、电子炮警示器28和组合惯导14,所述信息采集器包括用于采集动物图像信息的摄像头以及用于采集障碍物信息的雷达,所述摄像头和雷达分别与所述中控机15通讯连接,所述中控机15与发出警示音的所述电子炮警示器28通讯连接,所述中控机15与用于定位的所述组合惯导14通讯连接。
32.所述组合惯导14的定位信息发送给中控机15,中控机15给所述移动装置发送运动轨迹,所述移动装置移动至相应的位置,摄像头采集动物的图像信息发送给中控机15,中控机15将对图像信息进行处理,若检测到图像信息中存在危害畜牧群的物种时,则所述中控机15通过无线通讯机构向远程控制端发送警报信息,并控制电子炮警示器28发出警示音,雷达采集障碍物信息传输给中控机15,若检测到障碍物时,移动装置停止运动。摄像头采集动物的图像信息发送给中控机15时,还可以实时监测养殖场内畜牧群的健康状态特征。中控机15将处理后的信息通过无线路由器17传递给远程控制端。
33.所述移动装置包括移动底盘、通过单摇臂独立悬挂结构装配于所述移动底盘下方的四个充气胶轮5,每一所述充气胶轮5由一个直流无刷伺服电机4驱动,所述直流无刷伺服电机4运行效率高,速度控制精确,转矩特性良好,拥有较好的线性调节控制特性,敏捷的时间响应性能,低能耗和寿命长。所述直流无刷伺服电机4与底盘控制系统通讯连接,所述底盘控制系统与所述中控机15通讯连接,每一个单摇臂独立悬挂结构上装配一个伸缩管式前叉液力减震器1,所述直流无刷伺服电机4与所述供电装置电连接,所述供电装置的电池组电连接有一个驱动电机总电,所述驱动电机总电分别通过支线连接所述的直流无刷伺服电
机4。
34.所述移动底盘采用inpower高效他励智能控制器可编程,所述移动底盘采用四轮差速转向设计,所述充气胶轮5为草地防滑橡胶轮胎,所述草地防滑橡胶轮胎与所述伸缩管式前叉液力减震器1的复合设计,再加上动力强劲的所述直流无刷伺服电机4结合供电装置的电池组,使得本安防放牧机器人具有较强的通过性可满足在多种恶劣环境中的运行。
35.所述移动底盘左右两侧安装有紧急停车开关9,所述紧急停车开关9与所述驱动电机总电连接,可在紧急情况下按下紧急停车按钮。所述移动底盘周围配置有前部防撞安全管3,以减缓事故中对机器人的损伤。所述移动底盘上安装有用于连接所述中控机15的外部扩展连接口7。所述移动底盘具有较小的轴距和转弯半径,在灵活性方面有较强的通过性。
36.所述移动底盘还设有与所述中控机15通讯连接的烟雾传感报警器31、温度传感器30和天气监控装置26,所述温度传感器30和所述天气监控装置26无时无刻的对畜牧区的温度和天气进行监测,可以最大限度的保证当前畜牧区的环境适应牲畜的生存,当检测到恶劣的天气时可以及时的向远程监控端发出警告,所述摄像头和烟雾传感报警器31分别通过有线通信机构将信息传输至中控机15实时分析处理,并将分析结果通过无线通信机构输送至远程监控端。
37.所述摄像头包括rgb摄像头24和长波红外摄像头25,所述雷达包括毫米波雷达2、超声波雷达21、激光雷达23。所述rgb摄像头24可以在白天或者光照充足的区域采集可视范围内信息,所述激光雷达23、超声波雷达21和毫米波雷达2具有极高的抗干扰能力、获取充分的环境信息、可全天时工作。所述rgb摄像头24和长波红外摄像头25可在良好可见度环境中采集图像数据,激光雷达23、超声波雷达21、毫米波雷达2在恶劣的灰尘环境或者雾天中也可采集清晰的目标数据,融合四种传感器可以更好的可帮助安防放牧机器人在大草原中的工作。所述检测模块中各个传感器的融合,加强了对外来物种和畜牧群状态的有效检测,强化了放牧区的安全性。毫米波雷达2与其他识别传感器进行融合增强识别的效果。
38.所述供电装置包括太阳能电池板29、置于能源仓6中的电池组、变压器18和逆变器19,所述电池组通过车辆充电连接口8充电,所述太阳能电池板29和电池组通过插排与所述变压器18电连接,所述变压器18与所述中控机15电连接,所述变压器18通过逆变器19与装配于所述移动装置上的组合惯导14、超声波雷达21、毫米波雷达2、激光雷达23、烟雾传感报警器31、电子炮警示器28、温度传感器30和天气监控装置26电连接。当所述摄像头和烟雾传感报警器31检测到失火环境或烟雾信息后,所述摄像头和烟雾传感报警器31分别通过有线通信机构将信息传输至中控机15实时分析处理,并将分析结果通过无线通信机构输送至远程监控端。
39.实施例2
40.本实施例在实施例1的基础上,对各部件的型号进行详细说明,所述中控机15的型号为nuvo-6108gc,所述组合惯导14为星网宇达m2,其通过串口与所述中控机15进行通讯,所述超声波雷达21为电进联科djlk-4y,其通过串口与所述中控机15通讯,所述毫米波雷达2为ars408s,其通过db9与所述中控机15进行通讯,所述激光雷达23的型号为雷神16线,其通过网口与所述中控机15进行通讯,所述温度传感器30为博汇htc-2,所述烟雾传感报警器31和温度传感器30通过rs485转换成usb与所述中控机15进行通讯,所述天气监控装置26为emate m0359,通过无线网与所述中控机15进行通讯(本车配备的路由器拥有4g无线网络),
所述中控机15通过无线网与远程通信端进行通讯,所述长波红外摄像头25为ds-2cd3t47ewd-l,所述rgb摄像头24为li-usb30-ar023zwdrb,所述长波红外摄像头25和rgb摄像头24通过usb与所述中控机15连接且通过yolov3检测算法来识别环境中的障碍物或危险物种,所述中控机15通过航空插头与底盘控制系统进行通讯,所述中控机15通过usb与执行模块(包括烟雾传感报警器31和电子炮警示器28)进行通讯。
41.进一步的,所述变压器18为lyonzg ly12v2系列220v转12v,所述逆变器19为小能人1000w,所述显示器27为戴尔17寸e1715s,所述太阳能电池板29为艺创yc200wl。
42.实施例3
43.本实施例是在实施例1-2的基础上介绍各部件的安装位置。如图3-4所示,所述移动底盘的顶面为底盘顶部面板11,底盘顶部固定板10通过铝合金连接支架12固定在底盘顶部面板11的顶部,元器件安装隔板20通过支撑立柱固定在底盘顶部固定板10的顶部,顶部安装平台隔板22通过支撑立柱固定在元器件安装隔板20的顶部,所述中控机15、逆变器19、组合惯导14、显示器27、无线路由器17和转接线板13安装在元器件安装隔板20上,有利于保持机器人在正常运行时的稳定性,与电池组电连接的所述转接线板13用于连接显示器27以及鼠标和键盘,所述显示器27与中控机15通讯连接。所述元器件安装隔板20上设置有操作台16,所述操作台16用于放置于所述中控机15连接的鼠标和键盘,用于录入信息,所述温度传感器30、烟雾传感报警器31、天气监控装置26、激光雷达23、rgb摄像头24和长波红外摄像头25装配于所述顶部安装平台隔板22上,位于所述安装支架的最顶部,有利于识别周边的环境信息和检测环境中的温度和天气等信息。
44.以上所述仅是本发明的优选实施方式,应当指出的是,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1