一种智能遛狗机器人的制作方法
1.本发明涉及智能机器人领域,具体为一种智能遛狗机器人。
背景技术:
2.机器人是一种自动化的机器,所不同的是这种机器具备一些与人或生物相似的智能能力,如感知能力、规划能力、动作能力和协同能力,是一种具有高度灵活性的自动化机器,随着人们对机器人技术智能化本质认识的加深,机器人技术开始源源不断地向人类活动的各个领域渗透,结合这些领域的应用特点,人们发展了各式各样的具有感知、决策、行动和交互能力的特种机器人和各种智能机器人,它既可以接受人类指挥,又可以运行预先编排的程序,也可以根据以人工智能技术制定的原则纲领行动,它的任务是协助或取代人类的工作,它是高级整合控制论、机械电子、计算机、材料和仿生学的产物,在工业、医学、农业、服务业、建筑业甚至军事等领域中均有重要用途。
3.随着智能机器人小型化,越来越多的智能机器人走进了人们的生活中,逐渐代替人类进行一些日常操作,比如家中的扫地机器人、餐馆中的服务机器人、公共场所的引导机器人等,由于现在人们的工作越发的繁忙,留给宠物的时间不多,而宠物狗需要经常的活动,以释放它的天性,为了接替人类完成遛狗的工作,遛狗机器人应运而生,现在的遛狗机器人通过摄像头、毫米波雷达及红外探头组成的视觉雷达对周边的环境及宠物的位置进行识别,通过音频或视频对宠物狗进行互动,从而达到遛狗的目的。
4.但现有遛狗机器人由于整体呈长方体,重心较高,自重较轻,无法有效应对成年宠物狗的冲击力,导致机器人无法具备牵引宠物狗的能力,只能通过音频或视频进行引导,且现有遛狗机器人多通过电动滚轴或小马达带动滚轮及履带转动,在平地和小斜坡上可以提供有效的动力,但遇到较差的地形或通过狗绳对宠物狗进行牵引时,其动力明显不足,另现有遛狗机器人逗狗时,通过发射器将逗狗球发射出去后无法进行有效回收,只能依靠宠物狗叼回或使用者回来后自行整理,无法通过反复发射逗狗球消耗宠物狗的精力,不具备持续逗狗的能力。
技术实现要素:
5.基于此,本发明的目的是提供一种智能遛狗机器人,以解决现有智能遛狗机器人无法牵引宠物狗、动力不足、无法持续逗狗的技术问题。
6.为实现上述目的,本发明提供如下技术方案:一种智能遛狗机器人,包括结构框架,所述结构框架顶部设置有上部外壳,所述上部外壳内部安装有贯穿其顶部的视觉雷达,所述结构框架底部设置有可升降的固定机构,所述结构框架内部中间设置有驱动机构,所述上部外壳内壁一端设置有逗狗机构及喂食机构,所述结构框架内部中一端设置有配重机构,所述结构框架两侧皆设置有行走机构。
7.通过采用上述技术方案,设置的结构框架对整体设备进行支撑,通过上部外壳对设备内部进行保护,通过视觉雷达对周边环境及宠物狗的位置进行定位,通过可升降的固
定机构调整机器人的固定与移动形态,通过驱动机构带动狗绳的收放,并在较差地形时给与行走机构提供额外动力,通过逗狗机构及喂食机构与宠物狗进行互动,通过配重机构调整设备的重量,从而适应不同体型的宠物狗,通过行走机构带动机器人行动。
8.本发明进一步设置为,所述固定机构包括升降液压顶、承压盘、橡胶层及限位杆,所述结构框架两侧安装有一对所述升降液压顶,一对所述升降液压顶输出端设置有所述承压盘,所述承压盘底部设置有所述橡胶层,所述承压盘顶部设置有与所述结构框架滑动连接的所述限位杆。
9.通过采用上述技术方案,设置的升降液压顶带动承压盘升降,通过承压盘提高底部结构强度,通过橡胶层给机器人提供更好的抓地力,通过限位杆限制承压盘只能上下位移。
10.本发明进一步设置为,所述喂食机构包括自动狗粮盒、食槽、食槽电机、食槽丝杆及食槽滑块,所述上部外壳内部安装有所述自动狗粮盒,所述上部外壳内部位于所述自动狗粮盒下方处滑动连接有与其配合的所述食槽,所述上部外壳内部安装有所述食槽电机,所述食槽电机输出端设置有所述食槽丝杆,所述食槽丝杆外侧套接有与所述食槽固定的所述食槽滑块。
11.通过采用上述技术方案,设置的自动狗粮盒盛装并投放狗粮,通过食槽将投放的狗粮托举到宠物狗方便进食的位置,通过食槽电机带动食槽丝杆,进一步带动食槽滑块移动,从而控制食槽伸缩。
12.本发明进一步设置为,所述逗狗机构包括发射筒、弹簧、逗狗球、弹射板、弹簧卡扣、绕线筒及电动滚轴,所述上部外壳内部设置有所述发射筒,所述发射筒内部滑动连接有所述弹射板,所述发射筒内壁滑动连接有所述逗狗球,所述弹射板与所述发射筒之间连接有所述弹簧,所述发射筒底部转动连接有所述弹簧卡扣,所述发射筒内部一端安装有所述电动滚轴,所述电动滚轴外侧设置有所述绕线筒,所述绕线筒外侧设置有与所述弹簧卡扣配合的击发凸起,所述绕线筒外侧缠绕有与所述逗狗球连接的回拉绳,所述弹射板中间开设有与回拉绳配合的过孔。
13.通过采用上述技术方案,设置的发射筒对逗狗球进行装填,通过弹射板与弹簧配合,对逗狗球进行发射,通过弹簧卡扣对弹射板进行锁定,使其进行待发射准备,通过电动滚轴带动绕线筒转动,通过击发凸起触动弹簧卡扣,通过回拉绳对逗狗球进行回收,通过过孔使回拉绳可以穿过弹射板。
14.本发明进一步设置为,所述配重机构包括安装柱及配重块,所述结构框架一端设置有所述安装柱,所述安装柱外侧设置有多组可拆卸的配重块。
15.通过采用上述技术方案,设置的安装柱固定配重块,通过配重块调节机器人自身重量。
16.本发明进一步设置为,所述驱动机构包括调节轮固定柱、电机、调节轮、电动推杆、传动齿轮、调节滑块及主动齿轮,所述结构框架内部中间安装有所述电机、轴承及所述调节轮固定柱,所述轴承内部转动连接有所述调节轮,所述电机输出端外侧套接有所述主动齿轮,所述调节轮固定柱内部滑动连接有所述调节滑块,所述调节滑块与所述调节轮固定柱之间连接有所述电动推杆,所述调节滑块内部设置有一对与所述主动齿轮及所述调节轮配合的所述传动齿轮。
17.通过采用上述技术方案,设置的调节轮固定柱固定电动推杆、传动齿轮及调节滑块,通过轴承固定调节轮,通过调节轮固定狗绳,通过电动推杆带动调节滑块滑动。
18.本发明进一步设置为,所述调节轮外侧缠绕有延伸至外侧的狗绳,所述调节轮内壁设置有刹片,所述调节轮内壁设置有与所述主动齿轮配合的啮合齿,所述调节轮固定柱内部底端设置有制动钳。
19.通过采用上述技术方案,设置的狗绳对狗进行牵引,通过啮合齿使主动齿轮与调节轮啮合,通过制动钳使调节轮刹停并固定。
20.本发明进一步设置为,所述电机贯穿所述调节轮固定柱一端设置有电动联轴器,所述结构框架内部转动连接有与所述行走机构连接的强化轴,所述强化轴与所述电动联轴器之间连接有同步带。
21.通过采用上述技术方案,设置的电动联轴器控制动力传输,通过同步带将动力从电动联轴器传输到强化轴,通过强化轴将动力传递至强化轮。
22.本发明进一步设置为,所述行走机构包括强化轮、主动轮、行走电动滚轴及橡胶履带,所述强化轴两侧皆设置有所述强化轮,所述结构框架内部下侧两端设置有两组所述行走电动滚轴,所述行走电动滚轴两侧皆设置有所述主动轮,所述主动轮与有所述强化轮外侧契合有所述橡胶履带。
23.通过采用上述技术方案,设置的强化轮将电机的动力传递到橡胶履带上,通过行走电动滚轴带动主动轮,通过主动轮带动橡胶履带,通过橡胶履带提供更好的抓地力。
24.本发明进一步设置为,所述上部外壳一侧开设有与所述配重机构配合的支撑槽,所述上部外壳远离支撑槽一侧开设有狗绳槽,所述上部外壳顶部设置有与所述喂食机构配合的加料槽。
25.通过采用上述技术方案,设置的支撑槽安装更多的配重块,通过狗绳槽使狗绳可以穿过,通过加料槽对自动狗粮盒进行加料。
26.综上所述,本发明主要具有以下有益效果:
27.1、本发明通过制动钳对调节轮进行锁定,并连接电动联轴器,将电机的动力通过同步带传递至强化轴上,从而集中动力带动橡胶履带转动,解决了传统遛狗机器人无法应对较差地形的问题,并使设备拥有足够的动力牵引宠物狗;
28.2、本发明通过弹射板在弹簧的作用下对逗狗球进行击发,当逗狗球击发后,延时结束后通过电动滚轴带动绕线筒进行拉绳的回收,通过拉绳将逗狗球回收至发射筒内,同时逗狗球在拉绳拉拉动下,推动弹射板挤压弹簧,并在复位后通过弹簧卡扣再度锁定弹射板,从而实现逗狗球的自动击发回收功能,解决了传统遛狗机器人通过发射器将逗狗球发射出去后无法进行有效回收的问题,使机器人可以通过反复发射逗狗球消耗宠物狗的精力,具备持续逗狗的能力;
29.3、本发明通过自动狗粮盒进行狗粮的盛装,并进行定时投喂,投喂时通过食槽进行狗粮的盛接,并通过食槽电机带动食槽丝杆转动,从而通过契合的食槽滑块带动食槽探出,方便宠物狗进食,进食结束后将食槽收回,避免了传统遛狗机器人直接将狗粮投放在地面,导致狗粮污染和浪费的问题,且避免了传统遛狗机器人无法回收没吃完狗粮的弊端;
30.4、本发明通过安装的不同的配重块,方便使用者根据宠物狗的体型调节自身重量,并在遛狗娱乐等宠物狗施力较大的情况下,通过升降液压顶降下承压盘及橡胶层,通过
橡胶层的弹性变形及更大的接触面积,提供更高的抓地力,以应对宠物狗的大力拖拽,避免出现机器人侧翻或打滑的现象。
附图说明
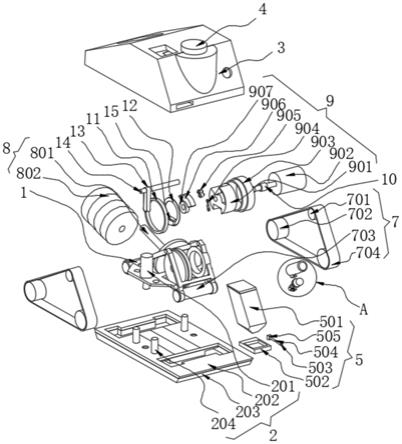
31.图1为本发明的结构爆炸图;
32.图2为本发明图1的a细节放大图;
33.图3为本发明的结构剖视图;
34.图4为本发明的整体示意图;
35.图5为本发明的驱动结构示意图;
36.图6为本发明的固定柱剖视图;
37.图7为本发明的固定机构示意图;
38.图8为本发明的喂食机构示意图。
39.图中:1、结构框架;2、固定机构;201、升降液压顶;202、承压盘;203、橡胶层;204、限位杆;3、上部外壳;4、视觉雷达;5、喂食机构;501、自动狗粮盒;502、食槽;503、食槽电机;504、食槽丝杆;505、食槽滑块;6、逗狗机构;601、发射筒;602、弹簧;603、逗狗球;604、弹射板;605、弹簧卡扣;606、绕线筒;607、电动滚轴;7、行走机构;701、强化轮;702、主动轮;703、行走电动滚轴;704、橡胶履带;8、配重机构;801、安装柱;802、配重块;9、驱动机构;901、调节轮固定柱;902、电机;903、调节轮;904、电动推杆;905、传动齿轮;906、调节滑块;907、主动齿轮;10、电动联轴器;11、轴承;12、刹片;13、同步带;14、强化轴;15、制动钳。
具体实施方式
40.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。下面通过参考附图描述的实施例是示例性的,仅用于解释本发明,而不能理解为对本发明的限制。
41.下面根据本发明的整体结构,对其实施例进行说明。
42.一种智能遛狗机器人,如图1所示,包括结构框架1,通过结构框架1对上部外壳3进行安装固定,并对内部各个组件进行安装承载,结构框架1顶部设置有上部外壳3,利用上部外壳3对设备内部进行保护,上部外壳3内部安装有贯穿其顶部的视觉雷达4,通过视觉雷达4对周边环境及宠物狗的位置进行定位,从而发射逗狗球603的方向,并判断宠物狗进食状态,结构框架1,结构框架1底部设置有可升降的固定机构2,通过可升降的固定机构2调整机器人的固定与移动形态,在移动时升起承压盘202,使橡胶履带704与地面接触,在固定形态时降下承压盘202,通过橡胶层203承载机器人重量,结构框架1内部中间设置有驱动机构9,通过驱动机构9带动狗绳的收放,当遇到动力不足,导致行走电动滚轴703负载过高的情况出现时,用制动钳15对调节轮903进行锁定,并连接电动联轴器10,将电机902的动力通过同步带13传递至强化轴14上,从而集中动力带动橡胶履带704转动,以应对传统遛狗机器人无法应对的较差地形,并使设备拥有足够的动力牵引宠物狗,上部外壳3内壁一端设置有逗狗机构6及喂食机构5,利用逗狗机构6反复发射并自动回收逗狗球603,从而与狗进行娱乐,并通过喂食机构5进行定时投喂,结构框架1内部中一端设置有配重机构8,通过配重机构8调整设备的重量,从而适应不同体型的宠物狗,结构框架1两侧皆设置有行走机构7,通过行走
机构7带动机器人行动。
43.请参阅图1和图7,固定机构包括升降液压顶201、承压盘202、橡胶层203及限位杆204,结构框架1两侧安装有一对升降液压顶201,通过设置的升降液压顶201带动承压盘202升降,从而切换机器人的移动与固定形态,一对升降液压顶201输出端设置有承压盘202,利用承压盘202的一体化结构,提高底部结构强度,承压盘202底部设置有橡胶层203,利用橡胶层203的弹性可以与地面更好贴合的特点,提高机器人的抓地力,承压盘202顶部设置有与结构框架1滑动连接的限位杆204,通过限位杆204限制承压盘202只能上下位移。
44.请参阅图1和图8,喂食机构5包括自动狗粮盒501、食槽502、食槽电机503、食槽丝杆504及食槽滑块505,上部外壳3内部安装有自动狗粮盒501,通过设置的自动狗粮盒501对狗粮进行盛装,并根据设定的时间进行定时的狗粮投放,上部外壳3内部位于自动狗粮盒501下方处滑动连接有与其配合的食槽502,上部外壳3内部安装有食槽电机503,食槽电机503输出端设置有食槽丝杆504,食槽丝杆504外侧套接有与食槽502固定的食槽滑块505,狗粮投放至食槽502后,通过食槽电机503带动食槽丝杆504,进一步带动食槽滑块505移动,从而控制食槽502探出,方便宠物狗进行进食,避免了狗粮投放在地面,容易导致狗粮污染的问题,且在宠物狗进食完毕后回缩食槽502,没吃完的狗粮留置在食槽502中,方便混入下次继续食用或进行回收。
45.请参阅图1和图2,逗狗机构6包括发射筒601、弹簧602、逗狗球603、弹射板604、弹簧卡扣605、绕线筒606及电动滚轴607,上部外壳3内部设置有发射筒601,通过设置的发射筒601对逗狗球603进行装填,发射筒601内部滑动连接有弹射板604,发射筒601内壁滑动连接有逗狗球603,弹射板604与发射筒601之间连接有弹簧602,通过弹射板604与弹簧602配合,将逗狗球603发射出去,从而进行逗狗,发射筒601底部转动连接有弹簧卡扣605,当弹簧卡扣605随着逗狗球603的回收被挤压复位时,通过弹簧卡扣605对弹射板604进行锁定,使其进入待发射状态,发射筒601内部一端安装有电动滚轴607,电动滚轴607外侧设置有绕线筒606,绕线筒606外侧设置有与弹簧卡扣605配合的击发凸起,通过电动滚轴607带动绕线筒606转动,击发时进行预放线,并在放线旋转时通过击发凸起触动弹簧卡扣605,完成弹射板604的击发,绕线筒606外侧缠绕有与逗狗球603连接的回拉绳,弹射板604中间开设有与回拉绳配合的过孔,逗狗球603击发后,通过拉绳将逗狗球603回收至发射筒601内,逗狗球603在拉绳拉拉动下,推动弹射板604挤压弹簧602,并在复位后通过弹簧卡扣605再度锁定弹射板604,从而实现逗狗球603的自动击发回收功能。
46.请参阅图3和图5,配重机构8包括安装柱801及配重块802,结构框架1一端设置有安装柱801,通过设置的安装柱801安装不同重量的配重块802,安装柱801外侧设置有多组可拆卸的配重块802,通过不同的配重块802调节机器人自身的重量,以适应不同体型的宠物狗。
47.请参阅图1和图5,驱动机构9包括调节轮固定柱901、电机902、调节轮903、电动推杆904、传动齿轮905、调节滑块906及主动齿轮907,结构框架1内部中间安装有电机902、轴承11及调节轮固定柱901,通过设置的调节轮固定柱901固定电动推杆904、传动齿轮905及调节滑块906,并通过轴承11固定调节轮903,轴承11内部转动连接有调节轮903,将狗绳固定于调节轮903外部,从而使狗绳根据调节轮903的旋转调节长度,电机902输出端外侧套接有主动齿轮907,调节轮固定柱901内部滑动连接有调节滑块906,调节滑块906与调节轮固
定柱901之间连接有电动推杆904,在需要将动力集中至橡胶履带704上时,通过电动推杆904带动调节滑块906滑动,接除主动齿轮907与调节轮903之间的动力连接,调节滑块906内部设置有一对与主动齿轮907及调节轮903配合的传动齿轮905,调节狗绳长度时,通过传动齿轮905将电机902的动力传递至调节轮903上,从而实现狗绳的调节。
48.请参阅图4和图6,调节轮903外侧缠绕有延伸至外侧的狗绳,通过设置的狗绳对狗进行牵引,调节轮903内壁设置有刹片12,调节轮903内壁设置有与主动齿轮907配合的啮合齿,通过啮合齿使主动齿轮907与调节轮903啮合,调节轮固定柱901内部底端设置有制动钳15,在动力集中至橡胶履带704上时,通过制动钳15使调节轮903刹停并固定,防止狗绳松动。
49.请参阅图1和图5,电机902贯穿调节轮固定柱901一端设置有电动联轴器10,当需要动力集中至橡胶履带704上时,通过设置的电动联轴器10与电机902的输出轴进行联结,从而将电机902的动力通过同步带13传递至强化轴14上,结构框架1内部转动连接有与行走机构7连接的强化轴14,强化轴14与电动联轴器10之间连接有同步带13,通过同步带13将动力从电动联轴器10传输到强化轴14,进一步通过强化轴14将动力传递至强化轮701,从而给予橡胶履带704更强的动力。
50.请参阅图1和图3,行走机构7包括强化轮701、主动轮702、行走电动滚轴703及橡胶履带704,强化轴14两侧皆设置有强化轮701,通过设置的强化轮701将强化轴14的动力传递到橡胶履带704上,结构框架1内部下侧两端设置有两组行走电动滚轴703,行走电动滚轴703两侧皆设置有主动轮702,主动轮702与有强化轮701外侧契合有橡胶履带704,通过行走电动滚轴703带动主动轮702,进一步使主动轮702带动橡胶履带704,从而利用橡胶履带704带动机器人移动。
51.请参阅图1和图4,上部外壳3一侧开设有与配重机构8配合的支撑槽,通过设置的支撑槽安装更多的配重块802,上部外壳3远离支撑槽一侧开设有狗绳槽,通过狗绳槽使狗绳可以穿过,上部外壳3顶部设置有与喂食机构5配合的加料槽,通过加料槽对自动狗粮盒501进行加料。
52.本发明的工作原理为:通过视觉雷达4内置的电瓶进行供电,通过视觉雷达4对周边环境及宠物狗的位置进行定位,从而避免宠物狗靠近容易缠绕狗绳的物体,且避免宠物狗靠近危险区域,实现与宠物狗在指定区域内的互动任务;
53.在遛狗时通过电动滚轴703带动主动轮702,从而使主动轮702带动橡胶履带704转动,推动机器人移动,当遇到动力不足导致行走电动滚轴703负载过高的情况出现时,通过调节轮903调节狗绳长度,并用制动钳15对调节轮903进行锁定,并连接电动联轴器10,将电机902的动力通过同步带13传递至强化轴14上,从而集中动力带动橡胶履带704转动,以应对传统遛狗机器人无法应对的较差地形,并使设备拥有足够的动力牵引宠物狗;
54.当抵达合适区域时,开始遛狗互动,消耗宠物狗的精力,通过电动滚轴607带动绕线筒606进行预放线,并在放线时通过击发凸起触动弹簧卡扣605,施放弹射板604,同时弹射板604在弹簧602的作用下对逗狗球603进行击发,当逗狗球603击发后,进行延时回收,延时结束后通过电动滚轴607带动绕线筒606进行拉绳的回收,通过拉绳将逗狗球603回收至发射筒601,内,同时逗狗球603在拉绳拉拉动下,推动弹射板604挤压弹簧602,并在复位后通过弹簧卡扣605再度锁定弹射板604,从而实现逗狗球603的自动击发回收功能,解决了传
统遛狗机器人通过发射器将逗狗球603发射出去后无法进行有效回收的问题,使机器人可以通过反复发射逗狗球消耗宠物狗的精力,具备持续逗狗的能力;
55.当到了预定的喂食时间及宠物狗互动表现较好时,通过自动狗粮盒501进行狗粮的盛装,并进行定时投喂,投喂时通过食槽502进行狗粮的盛接,并通过食槽电机503带动食槽丝杆504转动,从而通过契合的食槽滑块505带动食槽502探出,方便宠物狗进食,进食结束后将食槽502收回,避免了传统遛狗机器人直接将狗粮投放在地面,导致狗粮污染和浪费的问题,且避免了传统遛狗机器人无法回收没吃完狗粮的弊端;
56.随着宠物狗的成长,体型及力量发生变化,此时通过安装的不同的配重块802,方便使用者根据宠物狗的体型调节自身重量,并在遛狗娱乐等宠物狗施力较大的情况下,通过升降液压顶201降下承压盘202及橡胶层203,通过橡胶层203的弹性变形及更大的接触面积,提供更高的抓地力,以应对宠物狗的大力拖拽,避免出现机器人侧翻或打滑的现象。
57.尽管已经示出和描述了本发明的实施例,但本具体实施例仅仅是对本发明的解释,其并不是对发明的限制,描述的具体特征、结构、材料或者特点可以在任何一个或多个实施例或示例中以合适的方式结合,本领域技术人员在阅读完本说明书后可在不脱离本发明的原理和宗旨的情况下,可以根据需要对实施例做出没有创造性贡献的修改、替换和变型等,但只要在本发明的权利要求范围内都受到专利法的保护。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1