药剂播撒车辆的制作方法
1.本发明涉及进行药剂的播撒的药剂播撒车辆。
背景技术:
2.以往,已知一边从设于行驶车体的前部的左右的侧框架播撒药剂,一边在农田上行驶的药剂播撒车辆。
3.在上述的药剂播撒车辆中,左右的各侧框架具有细长的形状,通常以从车体的前部沿车体的侧面向后方延伸的姿势配置(收纳)于车体的两侧方,在播撒药剂时,绕设于车体的前部的大致上下轴向车宽方向外侧转动45
°
至90
°
左右而展开。以下,将侧框架从车体的前部沿车体的侧面向大致后方延伸的姿势称为“收纳姿势”,将侧框架向车宽方向外侧转动而展开的姿势称为“展开姿势”。
4.但是,左右的侧框架细长,因此容易因车体的振动、风、惯性等而振动,在左右的侧框架向后方延伸的姿势下,若后部向左右方向(车宽方向)内侧振动,则接触车体的侧面,若向左右方向外侧振动,则有时接触墙壁、电线杆等。
5.专利文献1公开了一种药剂播撒车辆,在车体的左右后部分别设置从正面观察呈大致u字状(两岔状)的悬臂架,通过将左右的侧框架分别以成为收纳姿势的状态从上方下降并容纳于悬臂架的内侧(u字的内侧),可以防止左右的侧框架的后部左右振动而接触车体、墙壁等(参照图2)。当容纳于从正面观察呈大致u字状的悬臂架时,各侧框架为沿大致前后方向穿通悬臂架的内侧的状态。
6.现有技术文献
7.专利文献
8.专利文献1:日本特开2019-115305
技术实现要素:
9.发明所要解决的课题
10.然而,在专利文献1记载的药剂播撒车辆中,在将容纳于悬臂架的侧框架从收纳姿势向展开姿势切换时,在使其绕大致上下轴向左右方向外侧转动而展开前,为了回避呈大致u字状的悬臂架的车宽方向外侧的部分,需要临时使侧框架上升(向上方转动)到比悬臂架的车宽方向外侧部分的上端部靠上方的位置。从而,直至将各侧框架展开成为展开姿势,耗费时间,作业效率差。
11.另外,在使处于展开姿势的侧框架转动而向收纳姿势切换时,也需要临时使侧框架上升到比悬臂架的车宽方向外侧部分的上端部靠上方的位置,然后再转动而切换到收纳姿势,之后向位于其下方的悬臂架的内侧(u字的内侧)下降,直至各侧框架成为收纳姿势,耗费时间,作业效率差。
12.进一步地,在使各侧框架下降时,若以保持高的速度接触形成大致u字状的悬臂架的底部,则存在侧框架破损的问题。
13.从而,本发明的目的在于提供一种药剂播撒车辆,能够将向农田播撒药剂的左右的侧框架以短时间切换收纳姿势和展开姿势,而且在切换姿势时,能够防止各侧框架破损。
14.用于解决课题的方案
15.方案1的发明为一种药剂播撒车辆,设有行驶车体、播撒药剂的左右的侧框架、使上述侧框架转动而切换收纳状态和展开状态的第一驱动器以及容纳收纳状态的上述侧框架的左右的悬臂架,其特征在于,在左右的各上述悬臂架的机体外侧部设有能够向从上述侧框架的转动轨迹退避的方向转动的退避部件,设有第二驱动器,该第二驱动器将上述退避部件在退避位置和容纳位置切换,上述退避位置是从上述侧框架的转动轨迹退避的位置,上述容纳位置是容纳收纳状态的上述侧框架的位置,使各上述侧框架转动来切换姿势时,通过上述第二驱动器使上述退避部件转动。
16.通过方案1的发明,在使左右的侧框架转动而切换姿势时,悬臂架的退避部件从侧框架的转动轨迹(转动跡)上退避,因此,在将侧框架从悬臂架展开、或者容纳于悬臂架时,无需使各侧框架上升到比悬臂架的机体外侧部分的上端部靠上方位置的工序,能够短时间进行各侧框架的姿势的切换。
17.另外,在使处于展开姿势的各侧框架转动而容纳于悬臂架时,无需使各侧框架下降,能够防止因误操作而使各侧框架强势地接触悬臂架而破损。
18.方案2的发明根据方案1记载的药剂播撒车辆,其特征在于,在使上述第一驱动器工作,使处于收纳姿势的上述侧框架转动而向展开姿势切换时,上述第二驱动器工作而使上述退避部件从上述侧框架的转动轨迹上退避,使处于展开姿势的上述侧框架转动而向收纳姿势切换时,上述第二驱动器工作而使上述退避部件向容纳上述侧框架的容纳位置移动。
19.通过方案2的发明,除了方案1的发明的效果,在使处于收纳姿势的侧框架转动而展开时,悬臂架的退避部件通过第二驱动器自动地从侧框架的转动轨迹上退避,因此能够省略额外使退避部件退避的操作,作业效率提高。
20.另外,在将处于展开姿势的侧框架转动而向收纳姿势切换时,悬臂架的退避部件通过第二驱动器向侧框架的容纳位置自动移动,因此能够省略将退避部件返回到初始的位置(容纳位置)的操作,作业效率提高。
21.方案3的发明根据方案1记载的药剂播撒车辆,其特征在于,具备探测左右的各上述侧框架的转动角度的转动角度探测机构,在使上述第一驱动器工作而将上述侧框架从收纳姿势向展开状態切换时,上述第二驱动器工作而使上述退避部件从上述侧框架的转动轨迹上退避,并且构成为当上述侧框架向机体外侧方向转动到预定角度时,使上述退避部件向上述侧框架的容纳位置移动,在使上述第一驱动器工作而将上述侧框架从展开姿势向收纳姿势切换时,上述第二驱动器工作而使上述退避部件从上述侧框架的转动轨迹上退避,当上述侧框架向收纳姿势切换时,使上述退避部件向上述侧框架的容纳位置移动。
22.通过方案3的发明,除了方案1的发明的效果,在使第一驱动器工作而切换侧框架的姿势时,悬臂架的退避部件通过第二驱动器自动从侧框架的转动轨迹上退避,因此无需额外操作退避部件,作业效率提高。
23.另外,处于收纳姿势的侧框架向展开姿势切换时,在转动到预定的角度的时刻,悬臂架的退避部件自动返回侧框架的容纳位置,由此,能够防止对使退避部件移动的第二驱
动器持续施加负载。
24.另外,当处于展开姿势的侧框架向收纳姿势切换时,悬臂架的退避部件自动返回到容纳位置,因此能够省略额外将退避部件返回到初始的位置的操作,作业效率提高。
25.方案4的发明根据方案1~3中任一项记载的药剂播撒车辆,其特征在于,具备加强左右的各上述悬臂架的底部的加强部件,上述加强部件和上述退避部件通过施力部件和上述第二驱动器连结,上述施力部件配置成对上述退避部件向上述侧框架的容纳位置侧施力。
26.根据方案4的发明,除了方案1~3中任一项的发明的效果,利用施力部件对退避部件向侧框架的容纳位置侧施力,由此能够减轻对使退避部件移动的第二驱动器施加的负担。
27.另外,由于设有加强部件,因此能够防止因施力部件施加的力而使悬臂架的底部破损。
28.方案5的发明根据方案1~3中任一项记载的药剂播撒车辆,其特征在于,在上述行驶车体具备操纵者搭乘的驾驶室,在上述驾驶室的侧面以向后上倾斜的姿势安装有扶手撑杆,在上述扶手撑杆的后上部固定有方向指示灯,上述方向指示灯位于侧玻璃的后端部的附近,该侧玻璃位于上述驾驶室的侧面的后部,上述扶手撑杆和上述方向指示灯配置成,在车宽方向上收敛于收纳姿势的上述侧框架与驾驶室之间的间隙。
29.通过方案5的发明,除了方案1~3中任一项的发明的效果,在车宽方向上,在驾驶室的侧面与成为收纳姿势的侧框架的间隙以向后上倾斜的姿势设有扶手撑杆,因此能够扩大可用作扶手的范围,并且能够在侧框架向车宽方向内侧振动时通过扶手撑杆保护驾驶室的上下方向上较大的范围。
30.另外,能够将扶手撑杆用于方向指示灯的安装,能够削减零件个数,简化结构。
31.另外,安装于扶手撑杆的后上部的方向指示灯位于处于驾驶室的侧面的后部的侧玻璃的后端部的附近,因此能够使方向指示灯在从操纵者的视野分离的位置工作,不会使操纵者感到晃眼。
32.另外,方向指示灯配置于驾驶室的侧面与侧框架之间,由此能够防止与侧框架的接触。
33.方案6的发明根据方案5记载的药剂播撒车辆,其特征在于,在上述驾驶室的后部设置有保护部件,该保护部件向车宽方向外侧突出来防止上述侧框架的接触,在由上述保护部件和上述驾驶室形成的空间内,角度调节自如地设有照亮后方的照明。
34.通过方案6的发明,除了方案5的发明的效果,通过在由防止侧框架接触驾驶室的保护部件和驾驶室形成的空间内设置照亮后方的照明,能够防止照明的破损。
35.另外,照亮后方的照明设置成角度调节自如,因此能够照亮所需的位置,能够容易地进行作业的确认性、后退时的行进路的确认。
36.发明的效果
37.根据本发明,能够提供一种药剂播撒车辆,能够将向农田播撒药剂的左右的侧框架短时间切换收纳姿势和展开姿势,而且在切换姿势时,能够防止各侧框架破损。
附图说明
38.图1是药剂播撒车辆的大致左侧视图。
39.图2是药剂播撒车辆的主要部分俯视图。
40.图3是药剂播撒车辆的控制系统、检测系统、输入系统以及驱动系统的块图。
41.图4是表示药剂播撒车辆的侧框架在车宽方向上转动的样子的局部放大俯视图。
42.图5是表示左右的侧框架均向车宽方向外侧转动的装填的药剂播撒车辆的前部的局部放大俯视图。
43.图6是表示药剂播撒车辆的左侧的侧框架的自由端向上方转动的状态的主要部分主视图。
44.图7是左侧的悬臂架附近的具备后视放大图。
45.图8是表示左侧的侧框架容纳于图7所示的左侧的悬臂架的动作的示意性的说明图。
46.图9是表示容纳于悬臂架的左侧的侧框架展开,并且向水平姿势切换的动作的示意性的说明图。
47.图10是药剂播撒车辆的后视图。
48.图中:1—药剂播撒车辆,4—驾驶座,5—方向盘,6—前轮,7—后轮,8—主车架,9—操作部,10—防振部,12—机罩,13—升降连杆装置,14—上部连杆臂,15—下部连杆臂,16—挂钩托架,17—提升缸,18—开闭缸,19—转动支点,20—驾驶室,21—方向指示灯,22—扶手撑杆,23—安装臂,24—安装臂,25—开闭门,26—门后方框架,27—齿轮传动马达,28—驾驶室后部框架,29—悬臂护罩,30—药剂箱,31—空间,32—作业灯,33—后玻璃,34—金属箔罩,35—轮毂,36—开口部,37—板,38—螺母,39—侧玻璃,40—支柱,41—支撑架,42—喷嘴,43—支柱,44—左侧的上下运动缸,45—右侧的上下运动缸,46—电磁阀,47—电磁阀,50—中央悬臂,51—左侧的侧框架,52—右侧的侧框架,53—角度传感器,58—转向传感器,60—控制器,61—处理部,62—存储部,64—栓,65—把手框架,66—框架,67—保持件,80—悬臂架,81—支撑架,82—外侧架部(退避部件),83—内侧架部,84—外侧架部的转动支点,85—撑杆,86—螺线管,87—长足部,88—短足部,89—弹簧,90—上下开关,91—左开闭开关,92—右开闭开关,93—左升降开关,94—右升降开关,95—容纳空间,96—马达。
具体实施方式
49.以下,参照附图,对本发明优选的实施方式详细地进行说明。如图1或图2中箭头所示地,将成为药剂播撒车辆1的行进方向的侧设为“前”,除非特别说明,否则便是,朝向药剂播撒车辆1的行进方向,将左侧称为“左”,将其相反侧称为“右”。
50.如图1或图2所示,药剂播撒车辆1具备:行驶车体2(参照图1);安装于行驶车体2的后部的药剂箱30;设于行驶车体2的前部的中央悬臂50;以及可转动地设于中央悬臂50的左右的左右的侧框架51、52。
51.如图1所示,行驶车体2具备主车架8、设于主车架8的上部的驾驶室20、前轮6及后轮7、以及在内部设有发动机3的机罩12。
52.在作业者(操纵者)搭乘的驾驶室20内设有操舵前轮6的方向盘5、驾驶座4、控制药
剂播撒车辆1的控制器60、以及具有各种操作开关的操作部9,药剂播撒车辆1基于落座于驾驶座4的作业者的操作,一边在农田上行驶,一边将贮存于药剂箱30内的药剂从中央悬臂50及左右的侧框架51、52向农田播撒。
53.从发动机3输出的动力在变速箱内(未图示)变速后传递至前轮6及后轮7。其结果,行驶车体2前进或后退。
54.药剂箱30是贮存农药等液体的容器,呈包围驾驶座4的俯视大致c字状。
55.如图1及图2所示,中央悬臂50及左右的侧框架51、52分别具备播撒从药剂箱30供给的药剂的多个喷嘴42,经由升降连杆装置13连结于行驶车体2的前部。
56.升降连杆装置13具备:互相平行地配置的上部连杆臂14及下部连杆臂15;安装于它们的前部的挂钩托架16;以及左右一对提升缸17,上部连杆臂14及下部连杆臂15的后端部连结于设于行驶车体2的前部的支柱40。
57.在挂钩托架16的前部安装有固定中央悬臂50的支撑架41,当通过图2所示的左右的提升缸17将上部连杆臂14及下部连杆臂15的前部上下转动时,挂钩托架16、支撑架41、中央悬臂50以及左右的侧框架51、52一体地上下升降(转动)。
58.如图3所示,苗移植机1的控制系统具备控制整体的动作的控制器60。
59.控制器60具备具有cpu(central processing unit)的处理部89和具有rom(read only memory)及ram(random access memory)的存储部62,在存储部62存储有控制苗移植机1的各种程序及数据。
60.如图3所示,药剂播撒车辆1的检测系统具备:具有检测方向盘56的舵角的编码器的转向传感器58;以及设于转动支点19(参照图4)的附近且检测以转动支点19为中心的各侧框架51、52的转动角度的角度传感器53。角度传感器53相当于本发明的“转动角度探测机构”。
61.如图3所示,药剂播撒车辆1具备作为输入系统发挥功能的操作部9(参照图2)。该操作部9具备:进行提升缸17(参照图1)的伸缩操作的上下开关90;使开闭缸18(参照图2及图4)伸缩,将左右的各侧框架51、52切换为展开姿势和收纳姿势的左开闭开关91及右开闭开关92;以及使各上下运动缸44、45(参照图2)伸缩,且使左右的各侧框架51、52的自由端(图2的后侧端部)沿上下方向转动的左升降开关93及右升降开关94。
62.如图3所示,药剂播撒车辆1的驱动系统具备:使图2所示的各提升缸17伸缩的马达96;使将图1所示的左右的各侧框架51、52切换为展开姿势和收纳姿势的左右的各开闭缸18伸缩的左右的齿轮传动马达27;使左右的上下运动缸44、45(参照图2)伸缩的左右的电磁阀46;以及切换悬臂架80的外侧架部82(参照图1及图2)的姿势的螺线管86。此外,螺线管86由推动螺线管构成。
63.图4是表示图1所示的药剂播撒车辆1的侧框架51、52在车宽方向上转动的样子的局部放大俯视图,图5是表示左右的侧框架51、52均转动到车宽方向外侧的状态的药剂播撒车辆1的前部的局部放大俯视图。
64.左右的侧框架51、52分别如下地能够在沿行驶车体2的侧面向后方延伸的收纳姿势(参照图2)和从行驶车体2向车宽方向外侧延伸的展开姿势(参照图5)之间左右独立地转动而切换。
65.如图4所示,在支撑架41的左右上表面分别安装有具有齿轮传动马达27的开闭缸
18。开闭缸18相当于本发明的“第一驱动器”。
66.各开闭缸18的前端部连结于设于支撑架41的左右两端部的安装臂23或24,构成为,当左右的各开闭缸18伸缩时,左右的各安装臂23、24以沿大致上下方向延伸的转动轴19为中心转动。
67.在此,左侧的安装臂23的后部固定于安装有左侧的侧框架51的一方的端部的左侧的支柱43,右侧的安装臂24的后部固定于安装有右侧的侧框架52的一方的端部的右侧的支柱43。从而,在各开闭缸18沿与图4中箭头x表示的方向平行的方向伸长的情况下,随着安装臂23、24转动,各侧框架51、52以转动轴19为中心与支柱43一体的向左右方向外侧转动。
68.其结果,如图5所示,各侧框架51、52形成向左右方向外侧展开的展开姿势,因此,能够一边在农田上行驶,一边使用中央悬臂50及左右一对侧框架51、52在车宽方向上大范围地播撒药剂。
69.与之相对,当左右的各开闭缸18收缩时,随着安装臂23、24转动,各侧框架51、52以转动轴19为中心向左右方向内侧转动。
70.其结果,如图2所示,各侧框架51、52成为沿行驶车体2的侧面向后方延伸的收纳姿势,因此,在不播撒药剂时,能够防止左右的侧框架51、52向车宽方向外侧突出。
71.进一步地,在成为收纳姿势的情况和成为展开姿势的情况下,均如下以下地,能够使各侧框架51、52的自由端(与安装于支柱43的端部相反的一侧的端部,图2所示的收纳姿势下的后侧的端部)左右独立地上下转动。
72.图6是表示图1所示的药剂播撒车辆1的左侧的侧框架51的自由端转动到上方的状态的主要部分主视图。此外,在图6中,省略了驾驶室20等。
73.如图1及图6所示,连接左右的各支柱43的上部和各侧框架51、52地设有左右的上下运动缸44、45。从而,当各上下运动缸44、45伸缩时,各侧框架51、52的自由端向下方或上方转动。
74.当各上下运动缸44、45伸长而使各侧框架51、52的自由端向下方转动到极限时,各侧框架51、52形成自由端和固定于安装臂23的固定端位于大致相同的高度位置的大致水平的姿势(参照图6所示的右侧的侧框架52)。以下,将各侧框架51、52的自由端和固定端位于大致相同的高度位置的姿势称为“水平姿势”。
75.另一方面,当各上下运动缸44、45收缩,使各侧框架51、52的自由端上升时,各侧框架51、52以其自由端侧位于比固定端侧靠上方的方式称为倾斜的姿势(参照图6)。
76.此外,在图2所示的左右的各开闭缸18伸缩时,在该伸缩前后,穿过各侧框架51、52的固定端的水平的线与各侧框架51、52之间的仰角θ1(参照图6)被保持。
77.从而,在左侧的侧框架51向车宽方向外侧延伸的展开姿势且其自由端向上方转动成为主视倾斜的姿势的状态(参照图6)下,图4所示的左侧的开闭缸18收缩而向车宽方向内侧牵引时,左侧的侧框架51如图1所示地成为收纳姿势且后斜向上的姿势。
78.同样地,在右侧的侧框架52为展开姿势且其自由端和固定端位于大致相同的高度位置的水平的姿势的状态(参照图6)下,图4所示的右侧的开闭缸18收缩而向车宽方向内侧牵引时,右侧的侧框架52成为收纳姿势且水平姿势。
79.另一方面,如图1及图2所示,在行驶车体2的左右后部分别设有防振部10,该防振部10具有容纳处于收纳姿势(沿行驶车体2的侧面向大致后方延伸的姿势)的侧框架51或52
的悬臂架80。
80.在将处于展开姿势的各侧框架51、52切换到收纳姿势时,如图1及图2所示,通过容纳于各悬臂架80,能够防止形成为细长的各侧框架51、52的后部因行驶车体2的振动、强风而在车宽方向过度振动。
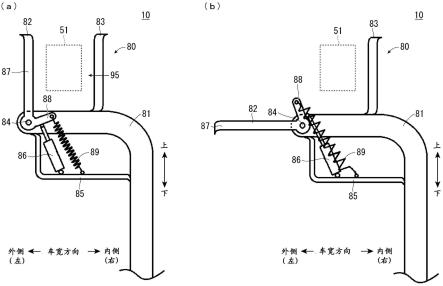
81.图7是图1所示的左侧的悬臂架80附近的局部后视放大图,图7(a)是表示左侧的悬臂架80的车宽方向外侧的部分闭合的状态的局部后视放大图,图7(b)是表示左侧的悬臂架80的车宽方向外侧的部分打开的状态的局部后视放大图。图8是表示左侧的侧框架51向图7所示的左侧的悬臂架80容纳的动作的示意性的说明图。
82.如图7(a)及图7(b)所示,左右的防振部10中的左侧的防振部10具备:安装于行驶车体2的后部的支撑架81;加强支撑架81的上部的大致l字状的撑杆85;能够以转动支点84(铰链)为中心转动地安装于支撑架81的车宽方向外侧(左侧)的端部的外侧架部82;不能转动地安装于支撑架81的比外侧架部82靠车宽方向内侧(右侧)的部分的内侧架部83;使外侧架部82转动的螺线管86(图1中未图示);以及对外侧架部82施力的弹簧89(图1中未图示)。
83.如图7(a)所示,由支撑架81的上端部、外侧架部82以及内侧架部83构成容纳左侧的侧框架51的左侧的悬臂架80。具体而言,左侧的悬臂架80的车宽方向外侧的部分由外侧架部82构成,左侧的悬臂架80的车宽方向内侧的部分由内侧架部83构成,左侧的悬臂架80的底部由支撑架81的上端部构成。
84.支撑架81的上部为大致l字状,横贯支撑架81的上部中的沿车宽方向延伸的部分和沿上下方向延伸的部分架设有作为加强部件发挥功能的撑杆85。
85.外侧架部82具备彼此延伸的方向不同的长足部87及短足部88,在短足部88的端部和撑杆85分别架设有螺线管86及弹簧89。换言之,短足部88的端部和撑杆85通过螺线管86及弹簧89连结。此外,外侧架部82对应于本发明中的“退避部件”。
86.外侧架部82通常以长足部87沿大致上下方向延伸的姿势(参照图7(a))被弹簧89施力,但当基于控制器60的输出信号使螺线管86伸长时,外侧架部82转动,切换成长足部87沿大致车宽方向延伸的姿势(参照图7(b))。
87.在形成长足部87沿大致上下方向延伸的姿势的情况下(参照图7(a)),如图8所示地,外侧架部82位于通过图4所示的左侧的开闭缸18伸缩而转动的左侧的侧框架51的转动轨迹(图8中用两点划线表示)上。
88.另一方面,在螺线管86伸长,切换成长足部87沿大致车宽方向延伸的姿势的情况下(参照图7(b)),如图8所示,外侧架部82退避到与左侧的侧框架51的转动轨迹(转动跡)不重合(不在转动轨迹上)的位置。
89.短足部88构成为比长足部87短,通过该结构,即使是伸长宽度较短的螺线管86,也能够使外侧架部82迅速且高效地转动。
90.另一方面,如图7(a)所示,左侧的侧框架51容纳于左侧的悬臂架80时,左侧的侧框架51向后方贯通由外侧架部82、内侧架部83以及沿左右方向延伸的支撑架81的上端部划分出的容纳空间95的内侧。
91.此时,如图1所示,左侧的侧框架51为向后上倾斜的姿势,因此在处于展开姿势且水平姿势的左侧的侧框架51容纳于左侧的悬臂架80时,首先基于作业者对操作部9的左升降开关93的操作驱动上下运动缸44,使左侧的悬臂架80的自由端向上方转动。
92.其结果,如图6所示,左侧的侧框架51成为向左上倾斜的姿势(自由端侧提高的状态)(参照图8的(i))。此外,此时的左侧的侧框架51的向左上倾斜的角度(仰角θ1)与图1所示的左侧的侧框架51的向后上倾斜的角度(仰角θ2)大致相同。
93.接下来,基于作业者对操作部9的左开闭开关91的操作,图2及图4所示的左侧的开闭缸18收缩,左侧的侧框架51切换到收纳姿势(参照图8的(ii))。
94.当左开闭开关91被操作时,使左侧的齿轮传动马达27驱动,在通过左侧的开闭缸18使处于展开姿势的左侧的侧框架51向车宽方向内侧转动时,控制器60基于左开闭开关91的操作使螺线管86伸长,如图7(b)及图8所示地,将外侧架部82切换到长足部87沿大致车宽方向延伸的姿势。
95.通过上述结构,左侧的侧框架51转动,在到达左侧的悬臂架80的附近之前,如图8所示地,外侧架部82从由两点划线表示的左侧的侧框架51的转动轨迹上自动地退避,能够省略在使左侧的侧框架51向车宽方向内侧转动时,作业者使外侧架部82从左侧的侧框架51的转动轨迹上退避的手续。
96.当左侧的侧框架51向收纳姿势切换时,控制器60基于角度传感器53的探测信号使螺线管86收缩,将外侧架部82切换到长足部87沿大致上下方向延伸的姿势(参照图7(a)),由此左侧的侧框架51向左侧的悬臂架80的容纳完成。
97.此外,并非必须构成为将使外侧架部82向长足部87沿大致上下方向延伸的姿势切换的时机设为将左侧的侧框架51完全切换到收纳姿势后,只要是在图9中左侧的侧框架51转动到比由虚线表示的外侧架部82靠车宽方向内侧后,也可以在左侧的侧框架51完全切换到收纳姿势前将外侧架部82向长足部87沿大致上下方向延伸的姿势切换。
98.如图7(a)及图8所示,被容纳的左侧的侧框架51位于外侧架部82与内侧架部83之间,能够防止因行驶车体2的振动、强风、惯性而在车宽方向上过度振动。
99.如上述地,在处于展开姿势的左侧的侧框架51向车宽方向内侧转动时,外侧架部82以转动支点84为中心转动,从左侧的侧框架51的转动轨迹上退避,因此,无需如图8中作为现有的转动轨迹所示地,使左侧的侧框架51的后部临时向上方转动到比外侧架部82的上端部靠上方的位置,进一步地,在切换到收纳姿势后,无需向下方转动到容纳空间95,因此能够将处于展开姿势的左侧的侧框架51短时间容纳于左侧的悬臂架80。
100.如以上地,构成为能够容纳于悬臂架80的左侧的侧框架51能够通过以下的动作展开,并且向成为水平姿势的状态切换。
101.图9表示容纳于悬臂架80的左侧的侧框架51展开,且进一步地向水平姿势切换的的动作的示意性的说明图。此外,图9中,用带箭头的两点划线表示左侧的侧框架51的转动动作,用作为参考的带箭头的点划线表示现有的左侧的侧框架的转动动作。
102.为了使容纳于悬臂架80的左侧的侧框架51成为展开姿势,并且向水平姿势切换,首先,基于作业者对操作部9的左开闭开关91的操作,图2及图4所示的左侧的开闭缸18伸长,左侧的侧框架51向展开姿势切换(参照图9(i))。
103.在此,在左开闭开关91被操作而使左侧的齿轮传动马达27驱动,并使容纳于悬臂架80的左侧的侧框架51通过左侧的开闭缸18向车宽方向外侧转动时,控制器60基于左开闭开关91的操作,使螺线管86伸长,如图7(b)及图9所示地,将外侧架部82向长足部87向大致车宽方向外侧延伸的姿势切换。
104.根据上述结构,在左侧的侧框架51碰撞悬臂架80的外侧架部82之前,外侧架部82从图9所示的由两点环线表示的左侧的侧框架51的转动轨迹自动地退避,因此,能够省略在使左侧的悬臂架80展开之前,作业者使外侧架部82从左侧的侧框架51的转动轨迹上退避的手续。
105.而且,在容纳于悬臂架80的左侧的侧框架51向车宽方向外侧转动时,外侧架部82从由两点划线表示的左侧的侧框架51的转动轨迹上退避,因此无需使图9中作为现有的转动轨迹表示的左侧的侧框架的后部向上方转动到比外侧架部82的上端部靠上方的位置,能够将容纳于悬臂架80的左侧的侧框架51以短时间切换到展开姿势。
106.这样,当离开容纳空间95的左侧的侧框架51向车宽方向外侧转动到图4所示的预定的角度θ3时,控制器60基于角度传感器53的检测信号对其进行探测,使螺线管86缩小,如图7(b)所示地将外侧架部82切换到长足部87沿大致上下方向延伸的姿势。通过上述结构,能够防止对螺线管86持续施加负载。
107.在基于左开闭开关91的操作,左侧的侧框架51转动到成为展开姿势后,基于左升降开关93的操作,通过控制器60使左侧的上下运动缸44伸长,左侧的侧框架51直至成为水平姿势,其自由端向下方转动(参照图9(ii))。
108.此外,在图8中,左侧的开闭缸18的收缩引起的左侧的侧框架51的转动轨迹由带箭头的细的两点划线(沿图中的车宽方向延伸的(ii)的部分)表示,在图9中,左侧的开闭缸18的伸长引起的左侧的侧框架51的转动轨迹由带箭头的细的两点划线(沿图中的车宽方向延伸的(i)的部分)表示,但左侧的开闭缸18的伸缩引起的左侧的侧框架51的实际的转动轨迹是在具有由两根三点划线表示的上下宽度的状态下,后视时沿车宽方向延伸。
109.从而,悬臂架的车宽方向外侧部分中的图8及图9中至少被两条三点划线夹着的灰色(灰色)的部分(位于左侧的侧框架51的实际的转动轨迹上的部分)需要避开未被两条三点划线夹着的部位。
110.此外,由该三点划线表示的上下宽度是用铅垂的面切割图8及图9中示意性地示出的成为收纳姿势的左侧的侧框架51的纵截面的上下方向的宽度。
111.以上,对左侧的防振部10、左侧的侧框架51转动带来的向悬臂架80的容纳动作和从悬臂架80展开的动作、以及基于控制器60的外侧架部82的自动的退避进行了说明,但能够使左右的各防振部10彼此左右对称地构成,与左侧的侧框架51的情况同样地,使右侧的侧框架52在车宽方向及上下方向上转动,从右侧的悬臂架80出入。另外,在将右侧的侧框架52从右侧的悬臂架80出入时,也能够与左侧的悬臂架80的情况同样地,通过控制器60使右侧的悬臂架80的外侧架部82自动地退避,或者返回到初始的位置(姿势)。
112.另一方面,如图1所示,驾驶室20具备左右的开闭门25、配置于开闭门25的后方的门扣房框架26、配置于门后方框架26的后方的侧玻璃39、位于侧玻璃39的后方的驾驶室后部框架28以及后玻璃。
113.在驾驶室20的左侧面的后部,横跨门后方框架26和驾驶室后部框架28地安装有扶手撑杆22,扶手撑杆22作为驾驶室20的加强部件发挥功能。
114.另外,扶手撑杆22形成大致
コ
字状(大致c字状),作业者打开开闭门25上下驾驶室20时,还作为把手发挥功能。
115.进一步地,如图2所示,扶手撑杆22配置成在车宽方向上位于成为收纳姿势的左侧
的侧框架51与驾驶室20的左侧面的间隙,防止了左侧的侧框架51未容纳于左侧的悬臂架80(参照图1)时,左侧的侧框架51振动而与驾驶室20的左侧面接触。
116.扶手撑杆22与侧玻璃39的下端部大致平行地配置成向后上倾斜的姿势(参照图1),能够在驾驶室20的上下方向上更大范围防护在车宽方向上振动的左侧的侧框架51。
117.另一方面,在扶手撑杆22的后上部设有方向指示灯21,方向指示灯21和扶手撑杆22配置成在车宽方向上位于成为收纳姿势的左侧的侧框架51与驾驶室20的左侧面的间隙,能够防止方向指示灯21被左侧的侧框架51隐藏。
118.另外,方向指示灯21设于侧玻璃39的后端部的附近且比后玻璃靠下方的位置,方向指示灯21在从作业者的视野分离的位置工作,因此可防止穿过后玻璃在视野的左右的端感到耀眼。
119.进一步地,方向指示灯21配置成与后轮7在车宽方向的位置大致相同,将方向指示灯21作为作业灯使用,由此能够在早晨或夜间的时间带明亮地照亮后轮7的附近。
120.此外,如图2所示,行驶车体2的右侧也同样地配置成,扶手撑杆22及方向指示灯21位于右侧的侧框架52与驾驶室20的右侧面的间隙。
121.另一方面,虽未图示,但在扶手撑杆22的下方设置朝向后方的后照相机,构成为能够确认后轮7的附近或后方的播撒状态。通过后照相机朝向后方,可防止药剂附着于后照相机。
122.如图1及图10所示,在驾驶室后部框架28的左右的侧面分别向车宽方向外侧突出地安装有形成大致c字状或大致反c字状的悬臂护罩29。
123.左右的悬臂护罩29分别位于比图1及图2所示的扶手撑杆22(图10中未示出)靠上方,为了防止在各侧框架51、52以比图1所示的状态大的角度成为向后上倾斜的姿势时,各侧框架51、52在车宽方向上振动而与驾驶室20的侧面上部接触而设置。即,左右的悬臂护罩29分别相当于保护部件。
124.如图10所示,在形成大致c字状或大致反c字状的左右的各悬臂护罩29的内侧分别形成有空间31。即,空间31是由驾驶室20和悬臂护罩29形成的空间。
125.如图10所示,在右侧的驾驶室后部框架28的侧面,在右侧的悬臂护罩29的空间31内设有作业灯32。
126.通过将作业灯32配置于右侧的悬臂护罩29的内侧,能够防止在侧框架51、52向车宽方向内侧振动时接触作业灯32。而且,通过将作业灯32安装于驾驶室后部框架28的侧面,不会阻碍图10所示的后玻璃33的开闭。此外,作业灯32对应于“照亮后方的照明”。
127.作业灯32通过单点固定在左右(车宽方向)上可摇头地装配于驾驶室后部框架28的侧面,因此能够改变照亮角度,照亮必要的位置。由此,能够容易地进行作业的确认性、后退时的行进路的确认,利便性良好。
128.此外,作业灯32构成为可左右调节角度,但作业灯32的可摇头的方向也可以是在纵向(上下方向)上,也可以构成为可以在上下左右上分别摇头。
129.另外,也可以通过使作业灯32上下反转而设于图1及图10所示的左侧的悬臂护罩29的内侧的空间31内。
130.在此,虽未图示,但作业灯32的线束铺设于右侧的悬臂护罩29,且配置于驾驶室20的背面,因此即使在将作业灯32设于左侧的悬臂护罩29的内侧的情况下,也能够不变更线
束的长度地来应对。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1