一种基于具有伸缩抓手臂的无人机的水果采摘系统
1.本发明属于水果采摘无人机技术领域,特别涉及一种基于具有伸缩抓手臂的无人机的水果采摘系统。
背景技术:
2.现阶段,水果采摘大多数仍为落后的人工采摘,效率低下,费时费力;人工成本也越来越高;而对于水果自动采摘而言,大部分是用地面的机械设备通过机械爪去进行抓取,然而面对较高的果实,例如乔木类的柿子等,地面的设备很难抵达;而无人机摘果的发展极不成熟,运用极少;随着无人机技术的不断发展,无人机摘果可探讨与发展的机会与方法越来越多,无人机摘果可以将高空摘果的难题解决。如中国实用新型专利“一种园林用柿子高效采摘装置”(cn205755596u)提供一种采摘时危险性小、采摘效率高、采摘时不易损伤果皮的园林用柿子高效采摘装置。但对于高大的乔木类果实采摘来说,人工的采摘仍有危险性的存在,该技术无法脱离人工的投入,对于大面积的柿子等乔木类果实而言,人工费时费力的情况依然存在。中国发明专利申请“一种基于齿轮转动的震动摘果机”(cn111713261a)利用了齿轮转动齿之间的间断性制作了一个震动机,震动机作用在树上使得树抖动,成熟的果实在抖动的作用下掉落,设备设有环绕树的软质材料接住掉落的果实,保证它们不会因为外力损坏。但该技术对于柿子等高大乔木来说实施困难,对柿子树进行震动,极可能造成树木损坏,并且柿子果表皮柔软,震动下来的柿子果破损率高。中国发明专利申请“一种小型摘果无人机及其工作方法“(cn109436322a)应用于水果或坚果的采摘环节,由操作人员通过遥控器操控无人机飞向目标果子,并以锂电池为能源完成无线信号传达的指令,从而夹紧果子并锯断果柄,完成以常用手段不易摘得的果子的收获过程。但无人机体型小导致装载量小,该专利需要无人机本身靠近目标果子,对于树枝较长的乔木果树,无人机很难飞入树枝内部,且过于靠近也会造成无人机坠落或果树损伤。
技术实现要素:
3.针对上述技术问题,本发明的目的是提供一种基于具有伸缩抓手臂的无人机的水果采摘系统,能够代替人工完成高空果实采摘,无人机的抓手可以伸展至树冠内,将对果树和果实的破损率降到最低,配合地面收集分拣移动平台,使无人机每摘取一定量果实后即可停靠卸载。
4.为了实现上述目的,本发明提供了如下技术方案:
5.一种基于具有伸缩抓手臂的无人机的水果采摘系统,包括无人机1和地面收集分拣移动平台24。
6.所述无人机1为由扇叶旋转马达3驱动扇叶2旋转的多旋翼无人机,无人机1的底部设有机脚6。
7.所述无人机1进一步包括万向节伸缩式抓手臂和存果舱12。
8.所述存果舱12设置在无人机1的机体上,存果舱12的顶部设有进果口4,底部设有
出果口31,所述出果口31处设有可开闭的底盖8。
9.所述万向节伸缩式抓手臂包括上下转动臂10、水平转动臂11、竹节式伸缩杆17和机械抓手;所述机械抓手包括抓手捏合指13、压力传感器14、抓手图像识别摄像头15、抓手掌16和抓手旋转马达18。
10.所述上下转动臂10通过一水平转动轴安装在无人机1的前端;所述水平转动臂11通过一竖直转动轴安装在上下转动臂10的前端;所述竹节式伸缩杆17固接在水平转动臂11的安装孔内,且竹节式伸缩杆17收缩状态时,整体位于水平转动臂11的安装孔内;所述抓手旋转马达18安装在竹节式伸缩杆17的前端;所述抓手掌16固接在抓手旋转马达18的转动轴上;三个抓手捏合指13均匀地安装在抓手掌16上,每个抓手捏合指13的与果实接触的一侧均设有一个压力传感器14;所述抓手图像识别摄像头15安装在抓手掌16的中心,用于识别并处理果实图像。
11.所述地面收集分拣移动平台24包括果实收集分拣箱体20、车轮22、分拣凹板25、伸缩顶杆28、旋转顶盘29和色彩传感器30。
12.所述地面收集分拣移动平台24通过四个车轮22实现全向移动;所述果实收集分拣箱体20设置在地面收集分拣移动平台24上,果实收集分拣箱体20的顶端后部设有用于无人机1的机脚6停靠的凹槽,以使无人机1能够稳定地停靠在果实收集分拣箱体20上。
13.所述果实收集分拣箱体20的顶部设有与无人机1的存果舱12的出果口31相对应的果实入口32;所述分拣凹板25沿移动平台前进方向设置在果实入口32的下方;所述分拣凹板25的横截面呈圆弧形,能够稳定地容纳由果实入口32进入的果实;所述分拣凹板25沿移动平台前进方向依次包括前端弧形部、中间水平部和后端弧形部;所述前端弧形部和后端弧形部的端部与果实收集分拣箱体20的顶壁固接;后端弧形部位于果实入口32的正下方。
14.所述色彩传感器30安装在果实收集分拣箱体20的顶壁中部,用于识别滚落在分拣凹板25的中间水平部上的果实的成熟度。
15.所述分拣凹板25的中间水平部的底部板面上沿移动平台前进方向等间距地设有多个分拣孔34;每个分拣孔34内均布置有一垂直固接在果实收集分拣箱体20底板上的伸缩顶杆28;每个伸缩顶杆28的顶端均通过一平行于移动平台前进方向的转轴设有一旋转顶盘29;旋转顶盘29的上表面与分拣孔34的边缘位于同一水平面内;所述转轴由步进电机驱动。
16.所述伸缩顶杆28和分拣凹板25将果实收集分拣箱体20分隔为左分拣仓和右分拣仓;伸缩顶杆28将停驻在旋转顶盘29上的果实向上推并高于分拣凹板25的左右边缘;相应的旋转顶盘29根据色彩传感器30识别的果实的成熟度向左或向右倾斜,将果实分拣至左分拣仓或右分拣仓内。
17.所述左分拣仓和右分拣仓所对应的果实收集分拣箱体20的侧壁上分别设有箱体侧盖33。
18.所述进果口4处设有缓冲坡面5。
19.所述无人机1的底部设有底盖滑轨19,所述底盖8可滑动地设置在底盖滑轨19上。
20.所述无人机1进一步包括前方视野图像识别摄像头7和侧方视野图像识别摄像头9;所述前方视野图像识别摄像头7和侧方视野图像识别摄像头9安装在无人机1的前端,分别用于采集无人机前方和两侧图像。
21.初始状态时,所述万向节伸缩式抓手臂的上下转动臂10、水平转动臂11、竹节式伸
缩杆17位于无人机1的机体凹槽内,所述机械抓手位于进果口4的上方。
22.所述地面收集分拣移动平台24进一步包括旋转摄像头21和侧面图像识别摄像头23;所述旋转摄像头21设置在果实收集分拣箱体20的顶端前部,果实收集分拣箱体20的两侧均设有一侧面图像识别摄像头23,旋转摄像头21和侧面图像识别摄像头23用于勘测地面收集分拣移动平台24的行驶路况。
23.所述旋转顶盘29的上表面设有圆形凹槽,使得果实稳定地停驻在旋转顶盘29上。
24.所述左分拣仓和右分拣仓内均设有多个与分拣孔34一一对应的一级缓冲坡道26,所述一级缓冲坡道26的上端固接在分拣凹板25的左边缘或右边缘上,用于对进入左分拣仓和右分拣仓的果实进行缓冲,避免果实损伤。
25.每个一级缓冲坡道26的下方均设有一个二级缓冲坡道27;所述二级缓冲坡道27的上端固接在果实收集分拣箱体20的侧壁上。
26.所述分拣凹板25的中间水平部上设有六个分拣孔34。
27.与现有技术相比,本发明的有益效果在于:
28.1、减少摘取柿子等乔木类的高空水果的人工成本,降低人工操作所带来的费时费力以及安全问题;
29.2、压力传感器的设置减少了柿子破损率,竹节式伸缩杆末端的抓手掌上安装图像识别摄像头,用以识别并处理柿子图像,抓手掌上的抓手捏合指上安装压力传感器,以保证在既定力度内捏取柿子等水果,也可以通过单片机调整既定力度,适应不同水果的软硬程度,防止抓取中的果实损坏;
30.3、为高空乔木类果实的摘取提供了新思路;
31.4、为无人机飞行中难以进入树枝内的问题提供解决方案,无人机配备的竹节式伸缩杆保证了无人机可以在机身不进入树枝内,利用竹节式伸缩杆将采摘手送至指定的远距离的目标处;
32.5、采用万向节式摆动臂搭配竹节式伸缩杆并装配于无人机上,实现无人机视野内全方位、全方向、高空瞄准并抓取柿子;
33.6、无人机的后部为存果舱,内有坡面,柿子落入后起到缓冲作用,有效降低果实损坏率;
34.7、无人机停靠在地面收集分拣移动平台后,底盖可以沿着底盖滑轨滑动,当滑动打开后,机箱内的果实可落出,便利高效地卸载果实;
35.8、地面收集分拣移动平台中的分拣凹板、一级缓冲坡道、二级缓冲坡道起到了三重的缓冲的保护作用以及传送果实的功能,有效防止果实砸损;
36.9、地面收集分拣移动平台中的分拣凹板的横截面呈圆弧形,能够稳定地容纳由果实入口进入的果实,分拣凹板沿移动平台前进方向依次包括前端弧形部、中间水平部和后端弧形部,前端弧形部和后端弧形部使得果实在稳定后保持在中间水平部内,分拣凹板的中间水平部的底部板面上沿移动平台前进方向等间距地设有多个分拣孔,而每个分拣孔内均布置有一垂直固接在果实收集分拣箱体底板上的伸缩顶杆,每个伸缩顶杆的顶端均通过一平行于移动平台前进方向的转轴设有一旋转顶盘,旋转顶盘的上表面与分拣孔的边缘位于同一水平面内,旋转顶盘的上表面设有圆形凹槽,使得果实稳定地停驻在旋转顶盘上。
37.10、地面收集分拣移动平台中的内壁上顶设置了色彩传感器,可以识别滚落在分
拣凹板上的果实颜色,进而对果实的成熟度进行筛选;
38.11、地面收集分拣移动平台中的中间的伸缩顶杆会上下伸缩、旋转顶盘可以左右摆动,完成果实颜色识别后,便可配合对其进行有效分拣,伸缩顶杆28向上推、以及旋转顶盘29的左右摆动,使得颜色不同成熟度不同的果实分别推向左右两侧,并沿着两侧的一级缓冲坡道、二级缓冲坡道到达两侧的底部;
39.12、地面收集分拣移动平台中的旋转摄像头、侧面图像识别摄像头起到勘测路况的作用。
附图说明
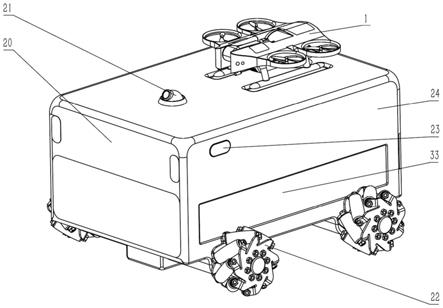
40.图1为本发明的基于具有伸缩抓手臂的无人机的水果采摘系统的结构示意图;
41.图2为本发明的无人机1的立体结构示意图;
42.图3为本发明的无人机1的侧视结构示意图;
43.图4为图3的剖视图;
44.图5为本发明的无人机1的底部结构示意图;
45.图6为本发明的无人机1的万向节伸缩式抓手臂的初始状态结构示意图;
46.图7为本发明的无人机1的万向节伸缩式抓手臂(竹节式伸缩杆17收缩)工作状态的结构示意图;
47.图8为本发明的无人机1的万向节伸缩式抓手臂(竹节式伸缩杆17伸展)工作状态的结构示意图;
48.图9为本发明的果实收集分拣箱体20的内部结构示意图;
49.图10为本发明的基于具有伸缩抓手臂的无人机的水果采摘系统的剖视结构示意图;
50.图11为本发明的果实收集分拣箱体20的侧剖结构示意图。
51.其中的附图标记为:
52.1 无人机
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
2 扇叶
53.3 扇叶旋转马达
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
4 进果口
54.5 缓冲坡面
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
6 机脚
55.7 前方视野图像识别摄像头
ꢀꢀꢀꢀꢀꢀꢀ
8 底盖
56.9 侧方视野图像识别摄像头
ꢀꢀꢀꢀꢀꢀꢀ
10 上下转动臂
57.11 水平转动臂
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
12 存果舱
58.13 抓手捏合指
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
14 压力传感器
59.15 抓手图像识别摄像头
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
16 抓手掌
60.17 竹节式伸缩杆
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
18 抓手旋转马达
61.19 底盖滑轨
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
20 果实收集分拣箱体
62.21 旋转摄像头
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
22 车轮
63.23 侧面图像识别摄像头
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
24 地面收集分拣移动平台
64.25 分拣凹板
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
26 一级缓冲坡道
65.27 二级缓冲坡道
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
28 伸缩顶杆
66.29 旋转顶盘
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
30 色彩传感器
67.31 出果口
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
32 果实入口
68.33 箱体侧盖
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
34 分拣孔
具体实施方式
69.下面结合附图和实施例对本发明进行进一步说明。
70.如图1所示,本发明的一种基于具有伸缩抓手臂的无人机的水果采摘系统,包括无人机1和地面收集分拣移动平台24;
71.如图2~图5所示,所述无人机1为由扇叶旋转马达3驱动扇叶2旋转的多旋翼无人机,无人机1的底部设有机脚6。
72.所述无人机1进一步包括万向节伸缩式抓手臂、前方视野图像识别摄像头7、侧方视野图像识别摄像头9和存果舱12。
73.所述存果舱12设置在无人机1的机体上,存果舱12的顶部设有进果口4,底部设有出果口31,所述出果口31处设有可开闭的底盖8。所述进果口4处设有缓冲坡面5,避免果实损伤。所述无人机1的底部设有底盖滑轨19,所述底盖8可滑动地设置在底盖滑轨19上。
74.所述前方视野图像识别摄像头7和侧方视野图像识别摄像头9安装在无人机1的前端,分别用于采集无人机前方和两侧图像,辅助飞行。
75.如图6、图7、图8所示,所述万向节伸缩式抓手臂用于实现无人机视野内全方位高空抓取果实;万向节伸缩式抓手臂包括上下转动臂10、水平转动臂11、竹节式伸缩杆17和机械抓手;所述机械抓手包括抓手捏合指13、压力传感器14、抓手图像识别摄像头15、抓手掌16和抓手旋转马达18;
76.所述上下转动臂10通过一水平转动轴安装在无人机1的前端;所述水平转动臂11通过一竖直转动轴安装在上下转动臂10的前端;所述竹节式伸缩杆17固接在水平转动臂11的安装孔内,且竹节式伸缩杆17收缩状态时,整体位于水平转动臂11的安装孔内;所述抓手旋转马达18安装在竹节式伸缩杆17的前端;所述抓手掌16固接在抓手旋转马达18的转动轴上;三个抓手捏合指13均匀地安装在抓手掌16上,每个抓手捏合指13的与果实接触的一侧均设有一个压力传感器14,以保证在既定力度内捏取果实,防止果实损坏;所述抓手图像识别摄像头15安装在抓手掌16的中心,用于识别并处理果实图像。
77.初始状态时,所述万向节伸缩式抓手臂的上下转动臂10、水平转动臂11、竹节式伸缩杆17位于无人机1的机体凹槽内,所述机械抓手位于进果口4的上方。
78.如图1、图9和图10所示,所述地面收集分拣移动平台24包括果实收集分拣箱体20、旋转摄像头21、车轮22、侧面图像识别摄像头23、分拣凹板25、一级缓冲坡道26、二级缓冲坡道27、伸缩顶杆28、旋转顶盘29和色彩传感器30。
79.所述地面收集分拣移动平台24通过四个车轮22实现全向移动;所述果实收集分拣箱体20设置在地面收集分拣移动平台24上,果实收集分拣箱体20的顶端后部设有用于无人机1的机脚6停靠的凹槽,以使无人机1能够稳定地停靠在果实收集分拣箱体20上;所述旋转摄像头21设置在果实收集分拣箱体20的顶端前部,果实收集分拣箱体20的两侧均设有一侧面图像识别摄像头23,旋转摄像头21和侧面图像识别摄像头23用于勘测地面收集分拣移动平台24的行驶路况。
80.如图11所示,所述果实收集分拣箱体20的顶部设有与无人机1的存果舱12的出果
口31相对应的果实入口32。所述分拣凹板25沿移动平台前进方向设置在果实入口32的下方;所述分拣凹板25的横截面呈圆弧形,能够稳定地容纳由果实入口32进入的果实;所述分拣凹板25沿移动平台前进方向依次包括前端弧形部、中间水平部和后端弧形部;所述前端弧形部和后端弧形部的端部与果实收集分拣箱体20的顶壁固接;后端弧形部位于果实入口32的正下方,用于缓冲由果实入口32进入的果实,避免果实损伤;所述前端弧形部和后端弧形部使得果实稳定后保持在中间水平部内。
81.所述色彩传感器30安装在果实收集分拣箱体20的顶壁中部,用于识别滚落在分拣凹板25的中间水平部上的果实的成熟度。
82.所述分拣凹板25的中间水平部的底部板面上沿移动平台前进方向等间距地设有多个分拣孔34;每个分拣孔34内均布置有一垂直固接在果实收集分拣箱体20底板上的伸缩顶杆28;每个伸缩顶杆28的顶端均通过一平行于移动平台前进方向的转轴设有一旋转顶盘29;旋转顶盘29的上表面与分拣孔34的边缘位于同一水平面内;所述转轴由步进电机驱动。所述旋转顶盘29的上表面设有圆形凹槽,使得果实稳定地停驻在旋转顶盘29上。
83.所述伸缩顶杆28和分拣凹板25将果实收集分拣箱体20分隔为左分拣仓和右分拣仓;伸缩顶杆28将停驻在旋转顶盘29上的果实向上推并高于分拣凹板25的左右边缘;相应的旋转顶盘29根据色彩传感器30识别的果实的成熟度向左或向右倾斜,将果实分拣至左分拣仓或右分拣仓内。
84.所述左分拣仓和右分拣仓所对应的果实收集分拣箱体20的侧壁上分别设有箱体侧盖33。
85.所述左分拣仓和右分拣仓内均设有多个与分拣孔34一一对应的一级缓冲坡道26,所述一级缓冲坡道26的上端固接在分拣凹板25的左边缘或右边缘上,用于对进入左分拣仓和右分拣仓的果实进行缓冲,避免果实损伤。
86.优选地,每个一级缓冲坡道26的下方均设有一个二级缓冲坡道27;所述二级缓冲坡道27的上端固接在果实收集分拣箱体20的侧壁上。
87.优选地,根据无人机1的存果舱12的装载容量,所述分拣凹板25的中间水平部上设有六个分拣孔34。
88.本发明的工作过程如下:
89.本发明的基于具有伸缩抓手臂的无人机的水果采摘系统在柿子树等高大乔木果树林中作业,无人机1起飞后,靠近果树,通过上下转动臂10将万向节伸缩式抓手臂转出,并上下摆动调整机械抓手的位置,直到目标果实的中心点位于抓手图像识别摄像头15视野的上下位置中央时,上下转动臂10停止摆动;接着水平转动臂11开始左右摆动,直到目标果实的中心点位于抓手图像识别摄像头15视野的水平位置中央时,水平转动臂11停止摆动,这时万向节伸缩式抓手臂成功瞄准到目标果实;这时竹节式伸缩杆17开始直线伸长直到抓手掌16靠近到目标果实时停止伸长,抓手捏合指13向中间捏合,当压力传感器14所受压达到既定值时,停止捏合,这时,抓手掌16在抓手旋转马达18的驱动下旋转一周,果实被成功取下;
90.接着万向节伸缩式抓手臂复位到初始状态,抓手捏合指13向外松开,果实落入存果舱12;存果舱12装满后,无人机1降落地面收集分拣移动平台24的果实收集分拣箱体20上,并打开底盖8进行卸载;
91.卸载的果实落入从果实入口32落入分拣凹板25上,并稳定地停驻在旋转顶盘29上;这时色彩传感器30识别滚落在分拣凹板25上的果实的色彩,对果实的成熟度进行识别;进而伸缩顶杆28向上推使果实高于分拣凹板25的左右边缘;相应的旋转顶盘29根据色彩传感器30识别的果实的成熟度向左或向右倾斜,将成色不同成熟度不同的果实推向左侧或右侧,果实沿着一级缓冲坡道26、二级缓冲坡道27到达左分拣仓和右分拣仓的底部;分拣完成后,开启箱体侧盖33将分拣后的果实取出。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1