一种基于压电效应的化肥播撒精准变量控制方法与流程
1.本发明涉及化肥播撒技术领域,具体涉及一种基于压电效应的化肥播撒精准变量控制方法。
背景技术:
2.变量施肥技术是精准农业的重要组成部分,在国外已获得了显著的经济和社会效益。我国变量施肥技术的研究起步相对较晚,与发达国家相比较还有较大的差距,主要表现在化肥投入结构的不合理,利用率低,大部分化肥、农药随着河水流入到附近江河,严重的污染了生态环境。长期大量投入施用化肥和农药,会造成土壤板结和土地退化。因此,合理利用化肥及研究施肥技术对我国农业发展有着非常积极的意义。
3.目前,国内的一些高等院校、科研单位对精准变量施肥技术展开研究,自主研发了一系列变量施肥机具和精准变量施肥控制系统。如中国专利cn 201811241975.8公开了一种智能化变量施肥装置及控制方法,可以根据土壤的氮含量实现施肥过程当中的变量调节,解决农作物施肥过程当中肥料的施加问题,但是其对施肥量的调节没有反馈,实际施肥量和目标施肥量之间存在偏差,无法实现精准的变量施肥。中国专利cn 202110290903.8公开了一种电动化肥播撒设备及其使用方法,该设备及方法能够解决化肥播撒的均匀性问题,但其施肥速率没有实现控制,无法完成精确的变量施肥。中国专利cn 201520600007.7公开了一种化肥自动撒播机,该撒播机能够实现自动化撒播,节约大量的人力物力,但其没有对施肥速率进行控制,无法根据土壤的不同肥力进行变量施肥。
4.虽然上述施肥撒播机在一定程度实现了智能化,提高了施肥作业效率,降低了化肥成本,但现有的施肥播撒设备不能达到精准变量施肥,没有建立目标施肥量和实际施肥量闭环自动控制调节系统。
技术实现要素:
5.本发明的目的在于提供一种基于压电效应的化肥播撒精准变量控制方法,该方法能够对化肥播撒量进行精确控制。
6.为实现上述目的,本发明采用了以下技术方案:
7.一种基于压电效应的化肥播撒精准变量控制方法,该方法包括以下步骤:
8.(1)化肥变量播撒,根据化肥播撒装置的目标化肥播撒速率设定驱动电机的初始转速;通过调节化肥播撒装置中用于化肥传输的驱动电机的转速,来对化肥的播撒速率进行调节。
9.(2)化肥播撒流速感知,首先,在化肥播撒装置出口处设置一安装有若干压电感应器件的接触面板,从化肥播撒装置流出的化肥落到接触面板上与接触面板发生碰撞,激发接触面板中的压电感应器件生成电信号;然后,将不同位置处的压电感应器件的电信号融合在一起得到化肥播撒整体的电信号,建立信号解析模型对电信号进行分析获得一组波峰值,对波峰值进行统计和求和;再利用预先标定的数据建立波峰幅值和播撒速率的映射关
系,基于映射关系得到对应的化肥实际播撒速率值。
10.(3)化肥播撒反馈控制,建立自动控制模型,将化肥实际播撒速率值与目标化肥播撒速率进行对比,获取播撒速率误差,根据播撒速率误差求得控制信号。
11.(4)化肥播撒装置流速调整,将控制信号反馈给化肥播撒装置中用于化肥传输的驱动电机,对驱动电机的转速进行调节。化肥播撒机构流速调整是化肥播撒反馈控制环节中的自动控制模型输出控制信号,信号被转速控制器接收,转速控制器根据信号大小调整化肥传输电机转速的大小。整个过程依次进行,直到自动控制模型输出控制信号恒定,即闭环控制系统保持状态稳定,达到精准变量施肥的目的。
12.(5)重复步骤(2)-(4),直至播撒速率误差为0。
13.所述化肥播撒装置包括化肥盛放容器、与化肥盛放容器出口相连的化肥输送机构和设置在化肥输送机构出口处的化肥播撒机构;所述化肥输送机构包括输送通道和安装在输送通道上的搅拌驱动组件;所述搅拌驱动组件包括驱动电机、用于调节驱动电机转速的转速控制器和与驱动电机输出轴相连的旋转齿轮;所述旋转齿轮包括安装在驱动电机输出轴上的连接块和沿连接块外周均匀分布的若干叶片;所述化肥播撒机构包括播撒电机和与播撒电机输出轴相连的旋转齿轮,所述接触面板安装在输送通道的出口处,接触面板上的不同位置处安装有多个压电感应器件,所述压电感应器件为压电薄膜传感器。所述接触面板包括底板、均匀安装在底板顶部的若干压电感应器件和安装在底板上方的顶板;所述接触面板安装在化肥播撒装置的出口处。化肥传输机构一般是一个旋转齿轮机构,调节转速来实现化肥传输的速率,转速越快传输的化肥越多。化肥经过化肥传输通道由化肥播撒机构进行均匀播撒,化肥播撒机构一般也是一个旋转齿轮机构,保持一定的速率将化肥从传输通道中向出口快速播撒,化肥通过出口均匀的播撒。化肥变量播撒的速率通过调节化肥传输机构的电机转速实现,初始状态根据目标化肥播撒速率来确定初始电机转速。
14.进一步的,步骤(2)所述的“化肥播撒流速感知”,其具体包括以下步骤:
15.(21)在化肥播撒装置出口处设置一安装有若干压电感应器件的接触面板,从化肥播撒装置流出的化肥落到接触面板上与接触面板发生碰撞,激发接触面板中的压电感应器件生成电信号。
16.(22)信号融合
17.(221)构造位置校正权重向量,令d=[d1,d2,d3…dn
]是压电感应器件的位置向量,其中,di表示第i个压电感应器件距离化肥播撒装置出口的距离,则位置校正权重向量计算为d=[d1,d2,d3…dn
],其中di计算如下:
[0018][0019]
(222)训练多传感器融合算法的参数,多传感器融合算法核心是结合位置校正层的多层感知机模型。在传统多层感知机的输入端添加一层位置校正层,对结合位置校正层的多层感知机模型进行参数学习,进行固定化肥数量播撒。
[0020]
(223)令是不同位置压点感知器件的电压信号序列,其中,压点感知器件数量为n,表示第j个压电传感器i时刻的电压信号值;[y1,y2,y3…
ym]是固定化肥数量模拟播撒的理论计算值,其中,yk表示k时刻播撒的理论计算电压信号值,w
ij
是ri到hj的权重,ai是hi到y的权重;多层感知机模型中有
[0021]ri
=xi×di
[0022][0023][0024]
模型参数利用随机梯度下降方法进行参数更新,求得一组[d,w,a,a,b],即得到用于多传感器融合的多感知机模型。
[0025]
(23)融合信号波峰检测
[0026]
对融合后压电信号的连续波形进行滤波处理后识别出波峰的位置,为后续播撒量的计算提供数据支撑。为从连续波形中去除噪声识别出实际的压电信号,本发明利用差分公式对融合后压电信号进行低通滤波、高通滤波、求导和平均,将信号转化为容易分析的形式,然后利用波峰搜索和判断方法识别出波峰。
[0027]
(231)令[x1,x2,x3…
xm]是融合处理后的高频电压信号采样序列,对采样点进行低通滤波,n表示采样点序号,得到输出y1,公式如下:
[0028]
y1[n]=2
×
y1[n-1]-y1[n-2]+x[n]-2
×
x[n-6]+x[n-12],n∈[1,2,
…
m]。
[0029]
(232)低通滤波,对低通滤波得到的输出y1[n]进行高通滤波,得到滤波后的信号输出y2[n],公式如下:
[0030]
y2[n]=y2[n-1]-y1[n]/32+y1[n-16]-y1[n-17]+y1[n-32]/32
[0031]
其中,n表示采样点序号,得到滤波输出y2[n]。
[0032]
(233)高通滤波,对高通滤波得到的输出y2[n]进行求导,求导公式如下:
[0033][0034]
公式展开得到:
[0035]
y3[n]=(2
×
y2[n]+y2[n-1]-y2[n-3]-2
×
y2[n-4])/8。
[0036]
(234)移动窗口平均,设计100ms的时间间隔移动窗口对y3[n]进行平均,n是窗口对应的采样点数量,z[n]是窗口平均后的压电信号数据:
[0037][0038]
(235)本发明提出一种波峰搜索和判断方法:波峰的基本判断可以利用点的幅值大小变化来判断。波峰搜索的方法是缓存上一个波峰以来的最大幅值h,当遇到一个波峰,判断这个波峰之前是否出现小于最大幅值h一半的点,如果是,则新的波峰成立;如果不是,则波峰不成立,对波峰位置的集合进行保存。
[0039]
(24)融合信号播撒量计算,构造1000ms的时间间隔移动窗口对波峰进行统计和求和,计算窗口时间内的波峰幅值总和,利用标定数据对赋值和播撒量建立映射关系,求得转化系数,令波峰幅值总和大小为p,标定单位时间播撒量为q,则转化系数a可以表示为:
[0040][0041]
当实时求得移动窗口内的波峰幅值总和p,利用转化系数a可得到当前单位时间播
撒量q。
[0042]
进一步的,所述自动控制模型采用三重门控循环神经网络。
[0043]
和现有技术相比,本发明的优点为:
[0044]
(1)本发明结合深度学习和信号处理理论和方法,建立波形和化肥量的信号解析模型,基于模型实现当前播撒量的监测,比较实际化肥播撒量和目标播撒量的偏差,反馈到化肥传输机构调整旋转齿轮的转速。本发明建立起化肥播撒闭环控制系统,将播撒量收敛到稳定值,从而实现化肥播撒量的精确控制,提高了肥料利用率、减少了肥料的浪费、避免了多余肥料对环境的不良影响,具有显著的经济、社会和生态效益。
[0045]
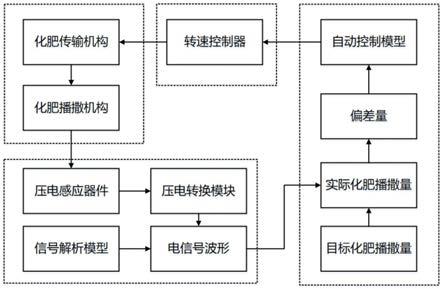
(2)本发明提出了一种精准变量施肥的控制方法,针对传统变量施肥装置和方法无法实现精准控制施肥量的问题,提出了一种由四个环节构成的精准变量施肥方法,分别是化肥变量播撒、化肥播撒流速感知、化肥播撒反馈控制、化肥播撒机构流速调整。第一个环节是化肥变量播撒,化肥播撒机构基于目标化肥播撒速率调节初始的参数进行化肥播撒;第二个环节是化肥播撒流速感知机构,利用传感器实时得到对应的化肥流速值;第三个环节是化肥播撒反馈控制,将第二个环节得到实际化肥播撒流速大小和第一个环节的目标化肥播撒流速大小进行比较,利用偏差计算得到一组控制信号,传输给化肥传输机构,让化肥播撒机构根据信号调节化肥播撒速率;第四个环节是化肥播撒机构流速调整,化肥播撒机构根据第三个环节的信号,调整化肥播撒速率,实现目标值和检测值的一致,达到精准变量施肥目的。本发明重点解决了化肥播散实时流速监测的技术难题,和化肥播撒自动反馈控制的技术难题,建立了化肥精准变量施肥的闭环控制系统,化肥播撒速率能够被实时地感知,信号反馈给控制系统后,系统利用控制算法能逐渐缩小误差,实现精准变量施肥。
[0046]
(3)本发明设计了一种针对精准变量施肥的实时化肥播撒量感知方法。化肥播撒过程中实际播撒速率的直接测量具有较高的难度,化肥播撒领域缺乏合适的流量传感器用于对化肥实时播撒速率进行监测。本发明利用压电薄膜传感器精度高、动态测量范围大的特点,提出了一种基于多传感器数据融合,利用压电效应来实时获取化肥播撒速率的方法。本发明构建的化肥播撒流速感知机构是通过在一定大小薄板的不同位置安装多个压电薄膜传感器,化肥颗粒播撒过程中对压电薄膜传感器产生冲击,不同的压电传感器产生不同的电信号,不同位置的信号融合在一起可以衡量化肥播撒整体的压力信号,将压力信号转化为流量信号以后可以准确地得到当前化肥播撒速率的大小,实现对给化肥播撒机构实时流速的感知。传统压电传感器多用于测量静态信号,而本发明是将压电薄膜传感器用到了动态测量的场景下。同时本发明也提出了信号解析模型,主要包括多传感器融合算法和电信号波峰检测算法。压电信号解析模型是学习电信号波形和化肥流速大小的关系,其中多传感器融合算法核心是结合位置校正层的多层感知机模型,解决了化肥播撒动态感知的技术难题,具体效果是化肥播撒运动能够被压电传感器准确地测量,不同传感器的电压信号经过融合得到化肥播撒的整体电压信号,经过压电信号解析计算得到化肥播撒的实际速率。电信号波峰检测算法是对动态信号进行测量,构建压电信号定量关系,分析压电感应器得到的压电信号波形,得到对应的化肥流速值。
[0047]
(4)本发明设计了一种基于深度循环神经网络的自动控制模型,以长短期记忆网络(lstm)为基本结构,将目标值作为lstm的状态量输入模型,同时不同时期的信号采用不同的门控机制,自动融合比例、积分和微分三种控制策略,实现精准化肥变量播撒控制。自
动控制模型的核心是利用动态闭环控制长短期记忆网络lstm来实现系统的自动控制,不同于传统控制模型,本发明将反馈控制思想融入到深度神经网络模型,将时序变化的反馈信号作为模型的输入值,将固定不变的目标信号作为模型的状态值,不同时刻结点设置不同的门控策略,实现不同控制策略,不同门控策略的输出再用全连接层得到最终结果,解决了动态系统在线自动控制的技术问题,能够将控制系统简单有效地域其他系统环节关联在一起,实现在线实时控制。自动控制模型接收化肥播撒量信号,利用动态闭环控制lstm得到控制信号,传输给化肥播撒机构,直到达到系统稳定。
附图说明
[0048]
图1是本发明的工作原理图;
[0049]
图2是本发明的控制流程图;
[0050]
图3是化肥播撒装置的结构示意图;
[0051]
图4是信号融合模型图;
[0052]
图5是本发明的信号波峰检测原理图;
[0053]
图6是本发明的波峰检测移动窗口平均后的波形图;
[0054]
图7是三重门控循环神经网络图。
[0055]
其中:
[0056]
1、化肥盛放容器,2、化肥输送机构,3、化肥播撒机构,4、接触面板。
具体实施方式
[0057]
下面结合附图对本发明做进一步说明:
[0058]
如图1所示,本发明涉及一种基于压电效应的化肥播撒精准变量控制方法,该控制方法用于对化肥播撒装置中的驱动化肥流动的电机的转速进行调节控制。如图3所示,所述化肥播撒装置包括化肥盛放容器1、与化肥盛放容器1出口相连的化肥输送机构2、设置在化肥输送机构2出口处上方的化肥播撒机构3和设置在化肥输送机构出口处一侧的接触面板4。所述化肥输送机构2包括输送通道和安装在输送通道上的搅拌驱动组件;所述搅拌驱动组件包括驱动电机、用于调节驱动电机转速的转速控制器和与驱动电机输出轴相连的旋转齿轮;所述旋转齿轮包括安装在驱动电机输出轴上的连接块和沿连接块外周均匀分布的若干叶片。所述输送通道的出口处安装有一带有若干压电感应器件的接触面板。所述接触面板4包括底板、均匀安装在底板顶部的若干压电感应器件(优选的取值范围为2~10个)和安装在底板上方的顶板;所述接触面板安装在化肥播撒装置的出口处。所述压电感应器件采用压电传感器。旋转齿轮沿竖直方向转动。所述化肥播撒机构3包括电机和与电机输出轴相连的齿轮,电机带动齿轮转动,对化肥输送机构出口处的化肥播撒速率进行调节,使化肥从化肥输送机构的出口处均匀地向外播撒到接触面板上。
[0059]
具体地说,如图2所示,本发明所述的一种基于压电效应的化肥播撒精准变量控制方法,包括以下步骤:
[0060]
s1、设定变量施肥流量参数50克/秒,确定本次施肥的施肥量,转速控制器以初始信号60转/秒控制驱动电机工作。驱动电机转动,带动旋转齿轮工作。化肥从化肥盛放容器出口流动到传输通道中,在转动的旋转齿轮的带动下,化肥沿传输通道向下流动,并从传输
通道的出口处流动到接触面板上。旋转齿轮依据转速控制器的设定转速进行化肥的传输。在传输通道的出口处,可以设置一个沿水平方向转动的旋转齿轮,该旋转齿轮也是由电机带动转动,用于使化肥均匀地播撒到接触面板上,带动该旋转齿轮转动的电机的转速可以设置为固定值,确保出口处的播撒量和播撒速度始终一致。
[0061]
s2、化肥从传输通道出口播撒落到接触面板上,化肥碰撞接触面板后激发压电感应器件,生成电信号,经过压电转换模块进行模数转化和方法,输出时序电信号波形。落到接触面板上的化肥会沿着接触面板向下滑落到需要播撒化肥的土壤中。压电感应器件在本发明中是用于对化肥播撒速率进行检测的一种手段,本发明提出了一种针对精准变量施肥的实时化肥播撒量感知方法,其核心是利用压电薄膜传感器精度高、动态测量范围大的特点,将压电薄膜传感器用到了动态测量的场景下,传统压电传感器多用于测量静态信号,本发明设计了电信号波峰检测算法对动态信号进行测量,构建压电信号定量关系;同时提出多传感器融合算法,解决了化肥播撒动态感知的技术难题,具体效果是化肥播撒运动能够被压电传感器准确地测量,不同传感器的电压信号经过融合得到化肥播撒的整体电压信号,经过压电信号解析计算得到化肥播撒的实际速率。
[0062]
s3、利用建立的信号解析模型对电信号波形进行处理,具体方法如下:压电感应器件生成的电信号经过模数转化后生成时序波形信号波形由一个个的不同峰值的波峰组成,信号建模的过程首先对信号进行预处理。
[0063]
本发明中信号解析模型是基于多传感器数据融合,利用压电感应器件的压电效应来实时获取化肥播撒速率的模型。信号解析模型分析不同的电信号,不同位置压电感应器件的电信号融合在一起可以获得化肥播撒整体的电信号。利用电信号波峰检测算法分析化肥播撒整体的电信号可以获得一组波峰值,对波峰值进行统计和求和,再利用预先标定的数据建立波峰幅值和与播撒速率的映射关系,基于映射关系得到对应的化肥播撒速率值。信号解析模型整个构建过程分解为三步:第一步信号融合;第二步融合信号波峰检测;第三步融合信号播撒量计算。第一步利用带位置校正层的多层感知机模型来实现多传感器信号融合,得到用于信号融合的多层感知机模型参数;第二步信号预处理和波峰检测算法来实现融合信号的波峰检测,得到一组波峰幅值;第三步利用标定数据建立融合信号和化肥播撒速率的数据关联,建立关系表达式。
[0064]
s31、信号融合,为提高检测精度,接触面板不同位置处安装有多个压电感应器件。由于化肥播撒后与接触面板的相对位置有差别,同样数量的化肥由于碰撞速度的不同产生的信号强度不同,所以构造位置校正权重向量,具体采用加权求和的方式融合不同位置器件的感知信号,位置校正权重向量通过线性拟合的方式获得。
[0065]
(1)压电信号
[0066]
令是不同位置压点感知器件的信号采样序列,[y1,y2,y3…
ym]是固定化肥数量单次模拟播撒的序列值,每次播撒压点感知器件产生单个波峰。
[0067]
(2)信号融合
[0068]
如图4所示,本发明提出了结合位置校正层的多层感知机模型,利用标注数据进行多层感知机的参数学习,实现信号融合。
[0069]
首先,构造位置校正权重向量,令d=[d1,d2,d3…dn
]是压电感应器件的位置向量,
其中,di表示第i个压电感应器件距离化肥播撒装置出口的距离,则位置校正权重向量计算为d=[d1,d2,d3…dn
],其中di计算如下:
[0070][0071]
然后,训练多传感器融合算法的参数,多传感器融合算法核心是结合位置校正层的多层感知机模型。在传统多层感知机的输入端添加一层位置校正层,对结合位置校正层的多层感知机模型进行参数学习,进行固定化肥数量播撒。
[0072]
最后,令是不同位置压点感知器件的电压信号序列,其中,压点感知器件数量为n,表示第j个压电传感器i时刻的电压信号值;[y1,y2,y3…
ym]是固定化肥数量模拟播撒的理论计算值,其中,yk表示k时刻播撒的理论计算电压信号值,w
ij
是ri到hj的权重,ai是hi到y的权重;多层感知机模型中有
[0073]ri
=xi×di
[0074][0075][0076]
模型参数利用随机梯度下降方法进行参数更新,求得一组[d,w,a,a,b],即得到用于多传感器融合的多感知机模型。
[0077]
s32、融合信号波峰检测,对融合后压电信号的连续波形进行滤波处理后识别出波峰的位置,为后续播撒量的计算提供数据支撑,具体如图5所示。
[0078]
(1)设[x1,x2,x3…
xm]是融合处理后的高频采样序列,先对采样点进行低通滤波,得到输出y1[n],y1[n]如下式所示:
[0079]
y1[n]=2
×
y1[n-1]-y1[n-2]+x[n]-2
×
x[n-6]+x[n-12],n∈[1,2,
…
m]。
[0080]
(2)再对低通滤波得到的输出y1[n]进行高通滤波,得到滤波后的信号输出y2[n],y2[n]公式如下:
[0081]
y2[n]=y2[n-1]-y1[n]/32+y1[n-16]-y1[n-17]+y1[n-32]/32
[0082]
其中,n表示采样点序号,得到滤波输出y2[n]。
[0083]
(3)对高通滤波得到的输出y2[n]进行求导,求导公式如下:
[0084][0085]
公式展开如得到:
[0086]
y3[n]=(2
×
y2[n]+y2[n-1]-y2[n-3]-2
×
y2[n-4])/8。
[0087]
(4)设计100ms的时间间隔移动窗口对y3[n]进行平均,n是窗口对应的采样点数量,z[n]是窗口平均后的压电信号数据:
[0088][0089]
(5)波峰的基本判断可以利用点的幅值大小变化来判断,如图6所示。波峰搜索的方法是缓存上一个波峰以来的最大幅值h。当遇到一个波峰,判断这个波峰之前是否出现小
于最大幅值h一半的点。如果是,则新的波峰成立;如果不是,则波峰不成立。对波峰位置的集合进行保存。
[0090]
s33、融合信号播撒量计算。构造t1(t1=1000ms)的时间间隔移动窗口对波峰进行统计和求和,计算窗口时间内的波峰幅值总和。利用标定数据对赋值和播撒量建立映射关系,求得转化系数。
[0091]
令波峰幅值总和大小为p,标定播撒量为q,则转化系数a可以表示为
[0092][0093]
当实时就得移动窗口内的波峰幅值总和p,利用转化系数a可得到当前播撒量q,计算得到实际播撒流量是40g/秒。
[0094]
s4、将实际化肥播撒量40g/秒,跟目标化肥播撒量50g/秒进行比较得到偏差10克/秒,反馈给自动控制模型,由自动控制模型计算得到控制信号,传输控制信号到转速控制器调节驱动电机的转速为80转/秒,以此循环,直至最终实际化肥播撒量与目标化肥播撒量保持一致。
[0095]
所述自动控制模型采用三重门控循环神经网络。面向闭环反馈控制,本发明提出融合三重门控策略的循环神经网络,其中w是循环神经网络的状态参数,状态参数w是输入值化肥流量感知信号x与目标值化肥目标流量值z的差,随着不同的输入x发生变化,状态参数w保持一直更新。同时上一阶段的状态参数w传入下一阶段的计算过程。u和v分别是神经网络的权重系数。三重门控循环神经网络结构的最终的结果跟连续三个状态值相关。参数公式如下:
[0096]
w(t)=x(t)-z(t)
[0097]
o(t-1)=u
×
(x(t-1)-z(t-1))
[0098]
o(t)=u
×
(x(t)-z(t)-w(t-1))
[0099]
o(t+1)=u
×
(x(t+1)-z(t+1)+w(t))
[0100]
u(t)=v
×
(o(t)+o(t-1)+o(t+1))
[0101]
利用三重门控循环神经网络结构的固有特点,用循环神经网络表示自动控制的不同控制反馈方法,利用不同的门控策略比例门控、积分门控和微分门控策略来表示不同的控制方式,比例、积分和微分的反馈控制分别由网络结构的不同门控策略来表示。如图7所示,三重门控循环神经网络结构中,状态参数w一直存储上一时刻实际值和目标值的差,比例门控只考虑当前的偏差值,不计算状态参数中的数据;积分门控只考虑当前偏差值和上一次偏差值之和,不计算其他时刻状态参数;微分门控只考虑当前差值和上一次差值的差,不计算其他时刻状态参数。通过三重门控循环神经网络可以构建化肥播撒的自动控制模型,化肥播撒感知值和化肥播撒目标值同时不间断地输入到化肥播撒反馈控制中,得到误差信号传递给化肥播撒机构流速调整,实现误差的实时反馈,输出转速调整信号,使得化肥播撒速率逐渐跟目标播撒速率保持一致。
[0102]
现有的施肥播撒设备基本都能实现自动播撒化肥,其中部分设备能够通过机械结构和自动控制实现化肥播撒的速度调节,但是存在一个问题是现有的变量施肥机构都只能单向控制施肥的速率,但是对实际化肥的速率无法进行感知,没有做到对实际化肥播撒速率的反馈,即不能确保实际化肥的播撒量和目标化肥的播撒量保持一致。本发明提出的精
准变量施肥控制方法首先能够自动控制化肥播撒的速率,对化肥的流速能够比较精准地进行控制;最大的区别和创新是利用压电传感器构建化肥流量监测和反馈模块,首先利用压电效应来实时动态感知实际化肥播撒量,实际化肥播撒量以反馈信号的方式传输给化肥播撒机构,然后化肥播撒机构根据化肥实际播撒量和目标播撒量之间的差值来计算和调节下一时刻化肥播撒量,建立目标施肥量和实际施肥量闭环自动控制调节系统,逐渐将差值缩小到0,实现实际化肥播撒量和目标化肥播撒量的一致,达到真正的精准变量施肥目的。
[0103]
在本发明中,精准变量施肥的整个过程逻辑上可以分为四个环节,第一个环节是化肥变量播撒,化肥播撒机构基于目标化肥播撒速率调节初始的参数进行化肥播撒;第二个环节是化肥播撒流速感知机构,由压电感应器件基于压电效应将化肥的力信号转化为电信号,建立信号解析模型,学习电信号波形和化肥流速大小的关系,利用信号解析模型可以分析压电感应器得到的压电信号波形,得到对应的化肥流速值;第三个环节是化肥播撒反馈控制,建立自动控制模型将差值转化为反馈控制信号,其中自动控制模型主要将第二个环节得到实际化肥播撒流速大小和第一个环节的目标化肥播撒流速大小进行比较,利用自动控制算法计算得到一组控制信号,传输给化肥传输机构,让化肥播撒机构根据信号调节化肥播撒速率;第四个环节是化肥播撒机构根据第三个环节的信号,调整化肥播撒速率,实现目标值和检测值的一致,达到精准变量施肥目的。
[0104]
以上所述的实施例仅仅是对本发明的优选实施方式进行描述,并非对本发明的范围进行限定,在不脱离本发明设计精神的前提下,本领域普通技术人员对本发明的技术方案作出的各种变形和改进,均应落入本发明权利要求书确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1