一种用于边坡的光伏板下自动除草装置及其使用方法与流程
1.本发明涉及除草设备装置技术领域,具体涉及一种用于边坡的光伏板下自动除草装置及控制方法。
背景技术:
2.安装在边坡上光伏板的维护工作除了对电路结构和机械结构进行检修外,还需要对边坡上的杂草进行清理,以避免杂草生长过快而对光伏板的受照射面造成影响;当前针对杂草的清理工作主要是靠人工进行,而一般边坡上除草难度较大,人工操作极为不便,故而一种能够在边坡自动除草的设备是目前所需要的。
技术实现要素:
3.本发明所要解决的技术问题是:提供一种用于边坡的光伏板下自动除草装置,以解决当前通过人力操作对边坡光伏板下侧进行除草工作时效率较低,无法满足工作需求的问题。
4.为解决上述问题,本发明提供了如下技术方案:一种用于边坡的光伏板下自动除草装置;它包括车体;在车体的底部安装有滚轮;滚轮由第一电机驱动;在车体上还设置有电控割草机;电控割草机由第二电机驱动,在车体上还安装有摄像头和控制单元;第一电机、第二电机和摄像头受控制单元控制,且均由内置电源进行供电;在控制单元上还集成设置有无线传输模块;控制单元能够通过无线传输模块与终端控制器进行数据传输。
5.优选的,电控割草机为一个转盘式割草机;电控割草机安装在车体底盘的中部位置,在车体的底盘的前侧还设置有辅助推盘。
6.优选的,滚轮为带有转向机构的传动四轮履带,第一电机为设置在车体对应位置上的编码电机。
7.优选的,在车体上还设置有电池仓,内置电源安装在该电池仓中。
8.优选的,摄像头为一个基于openmv的摄像头,且摄像头安装在车体的前侧位置。
9.优选的,还包括云端服务器,云端服务器中预存有边坡上光伏板浇筑基础的位置信息,终端控制器可对云端服务器进行数据访问和下载。
10.本发明还公开了一种用于边坡的光伏板下自动除草装置的控制方法,包括以下步骤:s1、操作人员手持终端控制器,通过终端控制器接入云端服务器中下载对应除草区域中光伏板浇筑基础的位置信息数据文件;并将该数据文件发送给控制单元;s2、将车体置于待除草的边坡上,确认当前距离车体最近的一个光伏板浇筑基础,并在终端控制器中将对应的光伏板浇筑基础位置作为初始位置;s3、通过终端控制器启动控制单元;车体原地旋转,通过摄像头获得周围影像信息,并根据预设的特征信号识别出视野内的光伏板浇筑基础,并结合步骤s1中获得的数据
文件确认车体当前的位置;s4、由控制单元控制车体移动至最近的一个光伏板浇筑基础旁,以该浇筑基础作为初始控制位置,计算规划能够经过边坡上所有光伏板浇筑基础的移动路径;s5、根据内置在控制单元中的运动程序,车体绕光伏板浇筑基础做半径逐渐扩大的绕圈运动,在绕圈的同时打开第二电机以带动电控割草机进行割草;s6、每绕一个光伏板浇筑基础完成割草工作后,车体即根据步骤s4中计算出的移动路径移动到下一个浇筑基础位置,移动的过程中通过摄像头获得的即时影像对路径及最后停留的位置进行修正;s7、此后重复步骤s5和s6,直至绕完所有的光伏板浇筑基础以结束割草工作,并向终端控制器发出通知,由操作人员对车体进行回收。
11.优选的,步骤s5中以浇筑基础作为中心进行绕圈时,车体以方形螺旋线为路径进行移动,且在移动的过程中通过摄像头来检测是否存在障碍,若存在障碍,则即时绕开,并通过无线传输模块向终端控制器发出报警信号。
12.本发明有益效果:本发明设计了一种能够在边坡光伏板下进行自动除草的装置,其通过在车体上设置滚轮及对应电机作为行动机构,同时再车体上还设置了转盘式的电控割草机和对应电机作为割草执行结构,同时,本发明还提供了对于边坡上车体进行割草的控制方法,具体的,需要配合预存有边坡上光伏板位置信息的云端服务器,并结合车体放置在边坡上的具体位置进行计算,从而获得能够经过所有光伏板浇筑基础的规划路线,在每到一个光伏板浇筑基础位置时,根据内置的运动程序绕该基础进行割草处理。
附图说明
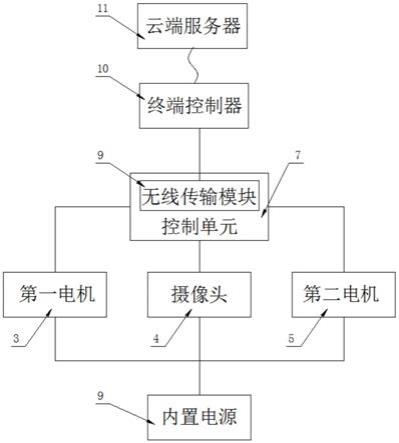
13.图1是本实施例中发明装置的结构示意图;图2是本实施例中电器元件的连接示意图;附图标记说明:1、车体,2、滚轮,3、第一电机,4、电控割草机,5、第二电机,6、摄像头,7、控制单元,8、内置电源,9、无线传输模块,10、终端控制器,11、云端服务器。
具体实施方式
14.下面结合附图及具体的实施例对本发明进行进一步介绍:实施例:参照图1,本实施例提供一种用于边坡的光伏板下自动除草装置;它包括车体1;在车体1的底部安装有滚轮2;滚轮2由第一电机3驱动;在车体1上还设置有电控割草机4;电控割草机4由第二电机5驱动,在车体1上还安装有摄像头6和控制单元7;第一电机3、第二电机5和摄像头6受控制单元7控制,且均由内置电源8进行供电;在控制单元7上还集成设置有无线传输模块9;控制单元7能够通过无线传输模块9与终端控制器10进行数据传输。本实施例中的控制单元7为mega2560芯片,终端控制器10为智能手机。
15.电控割草机4为一个转盘式割草机;电控割草机4安装在车体1底盘的中部位置,在车体1的底盘的前侧还设置有辅助推盘10。设置辅助推盘10的目的是为了将边坡上的土块或石块推开以防止电控割草机的刃口被崩坏。
16.滚轮2为带有转向机构的传动四轮履带,第一电机3为设置在车体1对应位置上的编码电机。
17.在车体1上还设置有电池仓,内置电源8安装在该电池仓中。
18.摄像头6为一个基于openmv的摄像头,且摄像头6安装在车体1的前侧位置。
19.还包括云端服务器11,云端服务器11中预存有边坡上光伏板浇筑基础的位置信息,终端控制器10可对云端服务器11进行数据访问和下载。
20.本发明还公开了一种用于边坡的光伏板下自动除草装置的控制方法,包括以下步骤:s1、操作人员手持终端控制器10,通过终端控制器10接入云端服务器11中下载对应除草区域中光伏板浇筑基础的位置信息数据文件;并将该数据文件发送给控制单元7;s2、将车体1置于待除草的边坡上,确认当前距离车体1最近的一个光伏板浇筑基础,并在终端控制器10中将对应的光伏板浇筑基础位置作为初始位置;s3、通过终端控制器10启动控制单元7;车体1原地旋转,通过摄像头6获得周围影像信息,并根据预设的特征信号识别出视野内的光伏板浇筑基础,并结合步骤s1中获得的数据文件确认车体当前的位置;s4、由控制单元7控制车体1移动至最近的一个光伏板浇筑基础旁,以该浇筑基础作为初始控制位置,计算规划能够经过边坡上所有光伏板浇筑基础的移动路径;s5、根据内置在控制单元7中的运动程序,车体1绕光伏板浇筑基础做半径逐渐扩大的绕圈运动,在绕圈的同时打开第二电机5以带动电控割草机4进行割草;s6、每绕一个光伏板浇筑基础完成割草工作后,车体1即根据步骤s4中计算出的移动路径移动到下一个浇筑基础位置,移动的过程中通过摄像头6获得的即时影像对路径及最后停留的位置进行修正;s7、此后重复步骤s5和s6,直至绕完所有的光伏板浇筑基础以结束割草工作,并向终端控制器发出通知,由操作人员对车体进行回收。
21.步骤s5中以浇筑基础作为中心进行绕圈时,车体1以方形螺旋线为路径进行移动,且在移动的过程中通过摄像头6来检测是否存在障碍,若存在障碍,则即时绕开,并通过无线传输模块9向终端控制器10发出报警信号。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1