一种新型机械爪的制作方法
1.本实用新型涉及夹持手抓技术领域,具体涉及一种新型机械爪。
背景技术:
2.机械爪是自动化移栽设备中的核心装置之一。移栽的目的是让种苗有足够的生长空间、并且便于后续工序处理。幼苗起初成长于穴位分布密集的育苗穴盘中,随后机械爪将幼苗从取出并且成功放到容量更大容器中。由于穴盘每个穴位的尺寸都较小、幼苗相对较为娇嫩、我国花卉选择用的育苗基质以易碎的草本泥炭为主,因此机械爪需要精准定位并且尽可能少的接触幼苗的主根径以及破坏幼苗的土球以保障存活率。成熟的机械手能完全取代人工,提供更高的效率、存活率。
3.当下移栽爪主要采取的方式是夹紧式,即末端入土后,通过结构设计使得末端有个夹紧的动作,从而得以将苗成功从穴盘中取出,随后利用不同的放苗结构将苗从爪上脱落。如公告号为cn102960106b的专利一种穴盘苗自动移栽取苗方法,该方案爪部夹取采用的是物理限位的方式,爪末端上端铰接,轨道套环件从爪中套入,当该件上下移动时会带动末端绕铰接点的转动,并且帮助将苗从爪的末端推落;其通过摆动和轨道实现爪的位置变换。此种设计结构复杂,整体灵活性差。公告号为cn102934556b的专利一种多功能移栽取放苗装置:首先牵引闸线放松四个夹取针,通过拉簧力作用,四针分别伸出张开额四根机械手指实习线差劲穴盘苗钵钵体;随后在禁锢弹簧的作用下捏紧穴盘苗钵钵体将其取出穴盘;继而在凸轮紧急装置的作用下,四指被推开,同时牵引宅先同时使得四指缩回,将苗脱落。
4.采用上述方式设计的移栽爪存在结构复杂的缺点,如何能够提供一种结构简单、稳定的机械爪是我们研究的问题。
技术实现要素:
5.本实用新型的目的在于提供一种新型机械爪,以解决现有技术中导致的夹紧式机械爪结构复杂的问题。
6.为达到上述目的,本实用新型是采用下述技术方案实现的:
7.一种新型机械爪,包括支座装置和抓取装置,所述抓取装置包括2组相向设置的爪组安装板和多组相向设置的入土爪,每个所述入土爪均通过驱动装置连接在所述爪组安装板的侧面,驱动装置用于带动所述入土爪伸缩;
8.所述支座装置包括安装板以及对称连接在所述安装板两侧的角度调整座,两侧的所述角度调整座之间的夹角可调节,两侧的所述角度调整座的外侧面均连接有爪组安装板,两侧的所述爪组安装板上相对应的两个所述入土爪之间形成角度可调节的夹持托举空间。
9.进一步地,所述安装板的底部设有孔二,所述安装板的中间部设有槽孔一;
10.所述角度调整座的底端通过孔二和安装板相连接,顶端通过槽孔一和安装板相连接,所述角度调整座绕孔二和安装板转动连接,所述角度调整座可转动的角度为槽孔一一
端和孔二之间的连线与槽孔一另一端和孔二之间连线的夹角。
11.进一步地,所述角度调整座的形状为u形,包括安装主板以及对称连接在所述连接主板两侧的第一侧板和第二侧板,所述第一侧板和所述安装板相连接;
12.所述爪组安装板的中间部设有槽孔五,所述爪组安装板通过槽孔五和安装主板相连接。
13.进一步地,两侧的所述角度调整座中的第一侧板之间通过加固件连接,所述加固件上设有孔七,所述加固件通过孔七和安装板相连接。
14.进一步地,两侧的所述角度调整座中的第二侧板之间通过连接板相连接。
15.进一步地,还包括连接装置,所述连接装置包括气缸安装座和轨道挡板件,所述轨道挡板件和气缸安装座相连接,所述轨道挡板件内设有放置入土爪的轨道槽;
16.所述驱动装置为笔形气缸,所述笔形气缸连接在所述气缸安装座内,所述笔形气缸的输出端贯穿所述气缸安装座和所述轨道槽内的入土爪相连接,所述笔形气缸用于带动所述入土爪伸出至轨道挡板件外或收回至轨道挡板件内。
17.进一步地,所述入土爪的末端为设有分叉。末端的分叉设计,防止了入土爪在进行种苗移栽抓取时切到根茎,保证了移栽种苗的效果。
18.进一步地,所述入土爪的形状为楔形扁平状。
19.进一步地,两个相对设置的所述入土爪之间形成的夹持托举空间为倒三角状。夹持托举空间为倒三角状,能够稳固的托住种苗。
20.进一步地,两个相对设置的所述入土爪之间的夹角范围为9
°‑
12
°
。
21.进一步地,爪组之间的间距为花盆直径相对应。
22.根据上述技术方案,本实用新型的实施例至少具有以下效果:
23.1、本装置设置的机械爪,通过驱动装置直接带动入土爪伸缩实现入土爪工作,结构简单稳定,两侧的爪组安装板上的入土爪之间形成的夹持托举空间可调节角度提高了本装置的工作范围,夹持托举空间在工作时,通过托举力和摩擦力共同作用下将抓取的苗从穴盘中取出,能够稳固住种苗,保证了移栽种苗的效果;
24.2、安装板上设置槽孔一和孔二,角度调整座底端和孔二连接,顶端和槽孔一连接,角度调整座可绕着孔二转动,通过孔和槽孔的设计能够使角度调整座多角度安装,结构简单调整角度方便;
25.3、两侧的角度调整座之间的第一侧板通过加固件连接,且加固件的中间部位和安装板相连接,加固件的设置保证了角度调整座的连接稳定性;连接板的设置进一步加强了两侧的角度调整座的稳定;
26.4、连接装置中轨道挡板件的设计有效的保护了入土爪,入土爪进行抓取时通过气缸带动使其伸出轨道挡板件,不进行抓取工作时气缸收缩使其处于轨道槽内,有效的保护了入土件的使用寿命,并保证了装置整体的安全性能。
附图说明
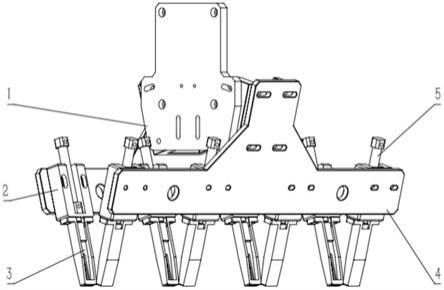
27.图1为本实用新型具体实施方式装置整体的示意图;
28.图2为本实用新型具体实施方式中支座装置的结构示意图;
29.图3为本实用新型具体实施方式中连接装置的结构示意图;
30.图4为本实用新型具体实施方式中安装板的示意图;
31.图5为本实用新型具体实施方式中角度调整座的结构示意图;
32.图6为本实用新型具体实施方式中连接板的结构示意图;
33.图7为本实用新型具体实施方式中加固件的结构示意图;
34.图8为本实用新型具体实施方式中气缸安装座的结构示意图;
35.图9为本实用新型具体实施方式中轨道挡板件的结构示意图;
36.图10为本实用新型具体实施方式中入土爪的结构示意图;
37.图11为本实用新型具体实施方式中爪组安装板的结构示意图。
38.其中:1、支座装置;2、连接装置;3、入土爪;4、爪组安装板;5、笔形气缸;6、安装板;7、角度调整座;8、加固件;9、连接板;10、气缸安装座;11、轨道挡板件;12、孔一;13、槽孔一;14、孔二;15、槽孔二;16、孔三;17、孔四;18、孔五;19、孔六;20、槽孔三;21、孔七;22、槽孔四;23、孔八;24、孔九;25、孔十;26、轨道槽;27、中缝一;28、孔十一;29、槽孔五;30、槽孔六。
具体实施方式
39.为使本实用新型实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本实用新型。
40.需要说明的是,在本实用新型的描述中,术语“前”、“后”、“左”、“右”、“上”、“下”、“内”、“外”等指示的方位或位置关系为基于附图中所示的方位或位置关系,仅是为了便于描述本实用新型而不是要求本实用新型必须以特定的方位构造和操作,因此不能理解为对本实用新型的限制。本实用新型描述中使用的术语“前”、“后”、“左”、“右”、“上”、“下”指的是附图中的方向,术语“内”、“外”分别指的是朝向或远离特定部件几何中心的方向。
41.实施例1:
42.如图1至图11所示,一种新型机械爪,包括支座装置1和抓取装置,抓取装置包括爪组安装板4和多个入土爪3,每个入土爪3均通过驱动装置连接在爪组安装板4的侧面,驱动装置用于带动入土爪3伸缩;支座装置1包括安装板6以及对称连接在安装板6两侧的角度调整座7,两侧的角度调整座7之间的夹角可调节,两侧的角度调整座7的外侧面均连接有爪组安装板4,两侧的爪组安装板4上相对应的两个入土爪3之间形成角度可调节的夹持托举空间。所述驱动装置为市场上现有的电动机械爪抓持装置,如onrobot2 夹持器。
43.本装置设置的机械爪,通过驱动装置直接带动入土爪3伸缩实现入土爪工作,结构简单稳定,两侧的爪组安装板4上的入土爪3之间形成的夹持托举空间可调节角度提高了本装置的工作范围。
44.具体的,如图2、图4和图5所示,安装板6为倒t形板状结构,安装板的顶部设有两个孔一12,用于将整个机械爪可以安装在外置模组上。安装板6的底部两侧对称设有孔二14,中间部对称设有两个槽孔一13,槽孔一13的形状为弧形,槽孔一13所在的圆的圆心为孔二14。孔二14和槽孔一13用于安装角度调整座7,角度调整座7的底端通过螺钉和孔二14连接,并能够绕孔二旋转,顶端连接在槽孔一内。弧形槽孔一13的尺寸决定了角度调整座7的调整角度。
45.具体的,角度调整座7的形状为u形,包括安装主板以及一体成型对称设置在连接主板后侧的第一侧板和左侧的第二侧板。第一侧板上设有连接孔,通过螺钉将第一侧板和
安装板的孔二14和槽孔一13相连接,需要调整角度时,只需改变第一侧板和槽孔一13的连接位置即可,操作方便简单。
46.如图11所示,爪组安装板4的中间部为向上突起状,下部为直线形板状,中间部设有槽孔五29,爪组安装板4通过槽孔五29和安装主板的孔四17相连接。
47.实施例2:实施例2与实施例1的区别仅在于增加了加固件和连接板,以提高角度调整座安装的稳定性。
48.具体的,如图2、图5至图7所示,为了保证角度调整座7连接在安装板6上的稳定,本装置还设置了加固件8和连接板9。加固件8的两端设有槽孔三20,中间部设有孔七21,连接时,加固件8的两端分别和两侧的第一侧板上的孔五18相连接,中间部和安装板6相贴,通过孔七21和安装板6上的槽孔二15相连接。连接板9的两端设有孔六19,连接板的两端通过孔六和两侧的第二侧板上的孔三16相连接。
49.如图1所示,两侧抓取装置结构相同,且两个抓取装置相对设置,即两侧的爪组安装板4上的对应的位置的入土爪3相对设置。保证两侧的入土爪之间能够形成夹持托举空间。
50.具体的,抓取装置包括爪组安装板4和连接装置2,如图3和图11所示。每个爪组安装板4上设置四个连接装置2,每个连接装置2包括一个入土爪3,即本装置包括四对入土爪3,能够实现同时抓取四个种苗。
51.爪组安装板4上设置的连接装置2的数量并不限于四个,可以为二个、三个或更多个,连接装置2的数量根据实际使用需要设置。
52.实施例3:实施例3与实施例1的区别仅在于给出了一种实现入土爪伸缩的具体结构。
53.具体的,如图8至图11所示,连接装置2包括气缸安装座10和轨道挡板件11,气缸安装座10上设有槽孔四22,爪组安装板4上设有槽孔六30,通过螺栓将气缸安装座10连接至爪组安装板4。笔形气缸5连接在气缸安装座10内,气缸安装座10的底端设有孔九24和孔八23,轨道挡板件11通过孔十25和孔八相连接。笔形气缸5的输出端贯穿孔九伸入至轨道挡板件11内和入土爪3的孔十一28相连接,带动轨道挡板件11的轨道槽26中的入土爪3伸缩。轨道挡板件11的底端设有中缝一27,保证入土爪3能够顺利实现伸缩。
54.在本实施例中,入土爪3的形状为楔形扁平状,在末端分叉以尽可能避免切到种苗的根茎。
55.在本实施例中,两个连接装置2之间的间距取决于花盆直径;两组入土爪3之间的角度在9
°
~12
°
;两侧相对的入土爪3最终相互配合在入球中间偏底部构成一个倒三角,能够稳固的拖住幼苗,从而在托举力和摩擦力共同作用下将抓取的苗从穴盘中取出。
56.另外,可根据托举的种苗的类型对两个连接装置之间的距离进行调节,两个连接装置之间的距离是多少,具体根据种苗确定。同样的是,入土爪3的角度也可进行调节,通过设置不同弧长的槽孔一13,可改变两对应入土爪之间的角度范围,进而可以调节两入土爪的角度至合适的范围。
57.综合实施例1
‑
3的所有技术特征,说明装置使用过程:
58.本装置的使用过程如下:设备启动,机械爪在外置模组驱动下回到初始点位置。此时,笔形气缸5活塞杆缩回,入土爪3缩回。在外置模组驱动下,机械爪精准定位到穴盘对应
穴位的正上方处;随后入土爪3在笔形气缸5驱动下伸出,扎入对应幼苗的土球中。然后机械爪在外置模组驱动下竖直上行,将幼苗从穴盘中取出并运输到下一装置处;入土爪在笔形气缸驱动下收缩,在挡板作用下,将苗成功放落。
59.本装置结构稳定:机构传动结构设计的简单直接;抓取牢固、运输过程中土球不易掉落晃动:由于入土件造型设计其与土球接触面较大;入土件最终相互配合在入球中间偏底部构成一个倒三角,能够稳固的拖住幼苗,从而在托举力和摩擦力共同作用下将抓取的苗从穴盘中取出。从穴盘中取苗时,入土件对根茎伤害较小:结合植株的生长特性,入土件在末端设有分叉,从而尽量避免伤害植株根茎。
60.由技术常识可知,本实用新型可以通过其它的不脱离其精神实质或必要特征的实施方案来实现。因此,上述公开的实施方案,就各方面而言,都只是举例说明,并不是仅有的。所有在本实用新型范围内或在等同于本实用新型的范围内的改变均被本实用新型包含。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1