一种番茄采摘机械手的夹紧装置
1.本实用新型属于番茄采摘技术领域,具体涉及一种番茄采摘机械手的夹紧装置。
背景技术:
2.番茄果实营养丰富,具特殊风味。具有减肥瘦身、消除疲劳、增进食欲、提高对蛋白质的消化、减少胃胀食积等功效。因此番茄是人们日常生活中广泛受欢迎的蔬菜,在全国各地具有大量的种植面积。特别是温棚种植技术普遍推广,能够保证一年四季都使人们能品尝到番茄。
3.番茄种植过程中,冬季一般是采用温棚来种植,在春秋季节仍然在温棚中种植,但是根据温度情况,可以将塑料膜卷起。当到了番茄的成熟季节,对于种植规模较小的种植户,一般是采用人工采摘的方式,也有大规模种植户采用也有采用机械手的方式进行番茄的采摘作业;对于采用人工采摘的方式其采摘效率低,人工的雇佣成本高;对于现有技术中采用机械手采摘的方式,其采摘过程会造成对番茄表面损毁,破坏番茄的品相;发明人基于现有技术中存在的上述缺陷研发了一种用于番茄采摘机械手的夹紧装置,能够很好地解决现有技术中存在的技术问题。
技术实现要素:
4.本实用新型为了解决上述技术问题,提供一种番茄采摘机械手的夹紧装置,该实用新型结构简单、科学合理、操作方便;本实用新型能够解决采用人工采摘的方式其采摘效率低,人工的雇佣成本高的问题,同时还解决了采用机械手采摘的方式,其采摘过程会造成对番茄表面损毁,破坏番茄的品相的问题。
5.本实用新型所采用的技术方案是:一种番茄采摘机械手的夹紧装置,包括固定盘、铰接槽、采摘臂;固定盘为圆盘状,铰接槽在所述固定盘的周向呈十字对称设置,所述铰接槽为穿过固定盘本体的u形状;采摘臂分为第一采摘臂,第二采摘臂、第三采摘臂和第四采摘臂,所述采摘臂包括固定架,固定架固定设置在所述铰接槽的底部位置,所述固定架与铰接槽上下对应设置,所述固定架在所述固定盘的底部周向呈十字对称设置;夹紧臂为弯曲的弧形,所述夹紧臂套在固定架的中间位置,夹紧臂通过铰接轴穿过其本身和固定架铰接,所述夹紧臂的上部延伸至固定盘的上部位置,夹紧臂的下部延伸至固定盘的底部位置;橡胶筒固定设置在夹紧臂的上端部,所述橡胶筒的内侧面设置有橡胶凸条;支撑柱固定设置在所述固定盘的上部中心位置,承接器固定设置在所述支撑柱的上部位置;所述第一夹紧臂固定设置在所述固定盘的左侧后部位置,第二夹紧臂固定设置在第一夹紧臂的前侧位置,第三夹紧臂固定设置在所述第二夹紧臂的右侧位置,所述第四夹紧臂固定设置在所述第三夹紧臂的后部位置;固定连动板a将第二夹紧臂和第三夹紧臂的底部固定连接成一体;固定连动板b将第一夹紧臂和第四夹紧臂的底部固定连接成一体;电动推杆a固定设置在所述固定连动板a的底部中间位置,电动推杆b固定设置在所述固定连动板b的底部中间位置。
6.所述承接器为碗型,承接器由柔性橡胶材料制成。
7.所述固定连动板a的左端与第二夹紧臂的右侧固定连接,固定连动板a的右端与第三夹紧臂的左侧固定连接。
8.所述固定连动板b的左端与第一夹紧臂的左侧固定连接,固定连动板b的右端与第四夹紧臂的左侧固定连接。
9.所述电动推杆a的底座与固定盘的底部固定连接,电动推杆a的伸缩杆与固定连动板a的中间位置固定连接。
10.所述电动推杆b的底座与固定盘的底部固定连接,电动推杆b的伸缩杆与固定连动板b的中间位置固定连接。
11.所述电动推杆a和电动推杆b通过连接导线与电源和机械臂的控制模块固定连接,通过机械臂的控制模块实现对电动推杆a和电动推杆b的自动伸缩控制。
12.这种番茄采摘机械手的夹紧装置的使用过程为:首先将这种用于番茄采摘机械手的夹紧装置安装在机械手臂的末端,机械手臂的控制模块自动控制机械手臂移动到所要采摘的番茄位置,当第一采摘臂,第二采摘臂、第三采摘臂和第四采摘臂将番茄果实包裹后,机械手臂的控制模块自动控制电动推杆a和电动推杆b同时动作,电动推杆a和电动推杆b的伸缩杆伸开动作后,推动固定连动板a和固定连动板b同时向上移动,在固定连动板a和固定连动板b向上移动动作的带动下,使第一采摘臂,第二采摘臂、第三采摘臂和第四采摘臂以固定架和夹紧臂铰接的铰接轴为轴心向中心位置靠拢夹紧,当第一采摘臂,第二采摘臂、第三采摘臂和第四采摘臂上橡胶筒上的橡胶凸条同时对准时,利用橡胶凸条对准的相切力,将番茄果实采摘掉;然后被采摘掉的番茄果实利用自身的重力,自动落入到承接器中,然后机械手臂自动将采摘后的番茄转运到番茄果实收集箱中。
13.所述固定盘为圆盘状,铰接槽在所述固定盘的周向呈十字对称设置,所述铰接槽为穿过固定盘本体的u形状;这样设置的主要目的是:通过铰接槽的设置,同时配合固定架以铰接轴为转动中心,实现夹紧臂的夹紧或松开动作。
14.所述采摘臂分为第一采摘臂,第二采摘臂、第三采摘臂和第四采摘臂,第一夹紧臂固定设置在所述固定盘的左侧后部位置,第二夹紧臂固定设置在第一夹紧臂的前侧位置,第三夹紧臂固定设置在所述第二夹紧臂的右侧位置,所述第四夹紧臂固定设置在所述第三夹紧臂的后部位置;这样设置的主要目的是:利用第一采摘臂,第二采摘臂、第三采摘臂和第四采摘臂的同时夹紧或松开动作,实现对番茄果实的采摘夹取。
15.所述采摘臂包括固定架,固定架固定设置在所述铰接槽的底部位置,所述固定架与铰接槽上下对应设置,所述固定架在所述固定盘的底部周向呈十字对称设置;夹紧臂为弯曲的弧形,所述夹紧臂套在固定架的中间位置,夹紧臂通过铰接轴穿过其本身和固定架铰接;这样设置的主要目的是:通过铰接槽的设置,同时配合固定架以铰接轴为转动中心,实现夹紧臂的夹紧或松开动作,最终实现了对番茄果实的夹紧采摘。
16.所述夹紧臂通过铰接轴穿过其本身和固定架铰接,所述夹紧臂的上部延伸至固定盘的上部位置,夹紧臂的下部延伸至固定盘的底部位置;橡胶筒固定设置在夹紧臂的上端部,所述橡胶筒的内侧面设置有橡胶凸条;这样设置的主要目的是:一方面,方便橡胶筒和橡胶凸条的固定安装;另一方面利用固定连接板a将第二采摘臂和第三采摘臂固定连接成一体,同时利用固定连接板b将第一采摘臂和第四采摘臂固定连接成一体,使第一采摘臂,第二采摘臂、第三采摘臂和第四采摘臂,通过电动推杆a和电动推杆b的伸缩动作,实现第一
采摘臂,第二采摘臂、第三采摘臂和第四采摘臂同时夹紧或松开动作。
17.本实用新型的有益效果:本实用新型提供一种番茄采摘的机械手,该实用新型结构简单、科学合理、操作方便;提高了对番茄的采摘效率,有效防止的番茄采摘过程中表面破损的现象,提高了番茄的采摘质量,降低了番茄的采摘成本。
附图说明
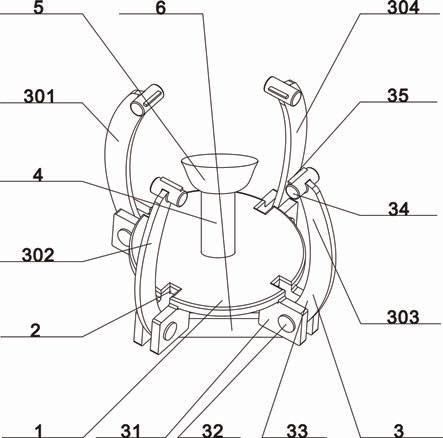
18.图1为本实用新型的结构示意图;
19.图2为本实用新型的底部结构示意图;
20.图中标记:1、固定盘,2、铰接槽,3、采摘臂,301、第一采摘臂,302、第二采摘臂,303、第三采摘臂,304、第四采摘臂,31、固定架,32、铰接轴,33、夹紧臂,34、橡胶筒,35、橡胶凸条,4、支撑柱,5、承接器,6、固定连动板a,7、固定连动板b,8、电动推杆a,9、电动推杆b。
具体实施方式
21.以下结合附图对本实用新型的具体实施方式做进一步的详细说明。
22.如图所示,本实用新型提供一种番茄采摘机械手的夹紧装置,包括固定盘1、铰接槽2、采摘臂3;固定盘1为圆盘状,铰接槽2在所述固定盘1的周向呈十字对称设置,所述铰接槽2为穿过固定盘1本体的u形状;采摘臂3分为第一采摘臂301,第二采摘臂302、第三采摘臂303和第四采摘臂304,所述采摘臂3包括固定架31,固定架31固定设置在所述铰接槽2的底部位置,所述固定架31与铰接槽2上下对应设置,所述固定架31在所述固定盘1的底部周向呈十字对称设置;夹紧臂33为弯曲的弧形,所述夹紧臂33套在固定架31的中间位置,夹紧臂33通过铰接轴32穿过其本身和固定架31铰接,所述夹紧臂33的上部延伸至固定盘1的上部位置,夹紧臂33的下部延伸至固定盘1的底部位置;橡胶筒34固定设置在夹紧臂33的上端部,所述橡胶筒34的内侧面设置有橡胶凸条35;支撑柱4固定设置在所述固定盘1的上部中心位置,承接器5固定设置在所述支撑柱4的上部位置;所述第一夹紧臂301固定设置在所述固定盘1的左侧后部位置,第二夹紧臂302固定设置在第一夹紧臂301的前侧位置,第三夹紧臂303固定设置在所述第二夹紧臂302的右侧位置,所述第四夹紧臂304固定设置在所述第三夹紧臂303的后部位置;固定连动板a6将第二夹紧臂302和第三夹紧臂303的底部固定连接成一体;固定连动板b7将第一夹紧臂301和第四夹紧臂304的底部固定连接成一体;电动推杆a8固定设置在所述固定连动板a6的底部中间位置,电动推杆b9固定设置在所述固定连动板b7的底部中间位置。
23.所述承接器5为碗型,承接器5由柔性橡胶材料制成。
24.所述固定连动板a6的左端与第二夹紧臂302的右侧固定连接,固定连动板a6的右端与第三夹紧臂303的左侧固定连接。
25.所述固定连动板b7的左端与第一夹紧臂301的左侧固定连接,固定连动板b7的右端与第四夹紧臂304的左侧固定连接。
26.所述电动推杆a8的底座与固定盘1的底部固定连接,电动推杆a8的伸缩杆与固定连动板a6的中间位置固定连接。
27.所述电动推杆b9的底座与固定盘1的底部固定连接,电动推杆b9的伸缩杆与固定连动板b7的中间位置固定连接。
28.所述电动推杆a8和电动推杆b9通过连接导线与电源和机械臂的控制模块固定连接,通过机械臂的控制模块实现对电动推杆a8和电动推杆b9的自动伸缩控制。
29.这种番茄采摘机械手的夹紧装置的使用过程为:首先将这种用于番茄采摘机械手的夹紧装置安装在机械手臂的末端,机械手臂的控制模块自动控制机械手臂移动到所要采摘的番茄位置,当第一采摘臂301,第二采摘臂302、第三采摘臂303和第四采摘臂304将番茄果实包裹后,机械手臂的控制模块自动控制电动推杆a8和电动推杆b9同时动作,电动推杆a8和电动推杆b9的伸缩杆伸开动作后,推动固定连动板a6和固定连动板b7同时向上移动,在固定连动板a6和固定连动板b7向上移动动作的带动下,使第一采摘臂301,第二采摘臂302、第三采摘臂303和第四采摘臂304以固定架31和夹紧臂33铰接的铰接轴32为轴心向中心位置靠拢夹紧,当第一采摘臂301,第二采摘臂302、第三采摘臂303和第四采摘臂304上橡胶筒34上的橡胶凸条35同时对准时,利用橡胶凸条35对准的相切力,将番茄果实采摘掉;然后被采摘掉的番茄果实利用自身的重力,自动落入到承接器5中,然后机械手臂自动将采摘后的番茄转运到番茄果实收集箱中。
30.对上述实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1