一种植保喷雾机械臂
1.本实用新型涉及农业机械技术领域,尤其涉及一种植保喷雾机械臂。
背景技术:
2.据2015年统计,我国各类植保机械保有量已超过6200万台套,中国植保机械93%仍为背负式等手、电动喷雾器,担负着60%~70%的防治面积,雾化效果差,“跑、漏、冒、滴”现象严重,农药利用率仅为20%~30%。
3.根据实际数据统计得,农产品安全生产的现实威胁主要来自农业生产者不规范的农药施用行为而导致的农药残留。在我国,农药残留问题普遍存在,特别是在瓜果、蔬菜和茶叶等农产品中较为突出。相关研究证实,农田喷洒农药后,一般只有10%~20%是吸附或粘着在农作物茎、叶和果实表面,而有40%~60%农药降落在地面上污染土壤,而土壤中的农药又通过植物的根系吸收转移到植物组织内部和果实中,对果实品质造成影响。
4.在美国大型蔬菜种植温室中,采用喷幅达18m以上的轨道式喷雾机,药剂箱的容量接近3000l,作业速度达8~10km/h,自动化程度和工作效率都非常高,但是对于立体种植的瓜果蔬菜并不适用,药液浪费严重,造成的污染也很严重,不利于绿色农业发展。
5.我国现常用的喷雾技术有:
6.①
超低量和低量喷雾技术
7.低容量喷雾喷雾器上喷头孔径有常规0.9
‑
1.6毫米改为0.6
‑
0.7毫米,实现了在压力恒定时,雾滴变细,覆盖面积增加,使得单位面积喷液用量由常规喷雾每亩100
‑
200升,降到每亩10
‑
14升。该方法的优点为工作效率高、用药少、防治效果好。
8.超低容量喷雾技术较低容量喷雾技术,可以使喷出的药液直径小到80
‑
120微米或者更细,主要用来防止作物虫害和消灭杂草。
9.超低量和低量喷雾技术并没有实现智能化,操作需要人力,并且由于药液浓度高需要在使用过程做好防护措施;同时也需要控制农药喷洒的速度。
10.②
高压静电喷雾技术
11.电压高,一般为5kv~10kv;电流小,一般最大为微安级,且多是负电输出。笔者试验中使用的高压静电发生电路采用单极负电输出,以生长在大地上的秧苗、蔬菜及果树为另一自然接地极。这样,经过罩在喷雾器喷嘴上的高压静电网喷出的雾状农药便带有高压负电荷,相当于喷出雾状负电束,与另一接地极接近或接触时,在高压静电层被叶片全方位吸引中和,洒落在叶片正背面。
12.现有技术的优点为直接在传统背驼手动式喷雾器的喷嘴上加一个高压静电网,操作简单便利。但此装置不能在雨天使用,且操作时需要离作物距离近,不能系统化的对植物定量且均匀喷涂药物,人为因素大,并且人工成本高。由此需要一种能够用于有指向性的,精准的对靶施药装置,以达到减少农药浪费和残留污染的问题。其次,现有技术中的装置都只对植被表面进行药剂喷洒操作,没有设置对类如对树干喷涂药剂的装置。
13.中国专利(cn106472474a)公开了一种农业用喷洒农药伸缩折叠机械臂,包括装置
主体,该装置主体的下端设置有两组移动滚轮,装置主体的内部安装有发动机,且发动机的输出轴通过传送带与前移动滚轮连接,装置主体的上端设置有容纳腔,容纳腔远离移动滚轮的一侧设置有滑动盖板,容纳腔底部的一端设置有电动转轴以及受电动转轴驱动的机械臂。但该装置的机械臂并不能实现整体转动,即该装置设置的机械臂只能实现单一平面的转动,虽然设置有多向喷头,但该多向喷头连接于不可整体周向旋转的机械臂一端,所以喷洒面积有限。该装置还存在自动化程度不高、机械臂以及臂杆转动角度不能控制、装置需要外接电源导致使用不便的问题。
14.此外,一方面由于对本领域技术人员的理解存在差异;另一方面由于实用新型人做出本实用新型时研究了大量文献和专利,但篇幅所限并未详细罗列所有的细节与内容,然而这绝非本实用新型不具备这些现有技术的特征,相反本实用新型已经具备现有技术的所有特征,而且申请人保留在背景技术中增加相关现有技术之权利。
技术实现要素:
15.针对现有技术之不足,本实用新型提供一种植保喷雾机械臂,包括机械臂主体、连接于所述机械臂主体下的机架以及药箱,所述机械臂主体活动连接于所述机架上端部,所述机架预定位置设置有控制板和电池,所述机械臂主体各个关节设置舵机组,所述舵机组、所述控制板和所述电池依次电连接,所述机械臂主体一端设置有喷药组件,所述喷药组件与所述药箱管道连接,所述喷药组件与所述药箱间的管路上设置泵机,所述泵机分别与所述控制板和所述电池电连接,所述机械臂主体的臂杆处还设置有拨开件。本装置的优点在于通过控制板内预设定的程序,有效地控制机械臂主体的转动角度,实现精准喷射药剂的目的;本装置设置的拨开件可拨开茂密植被,从而实现对树干的药剂喷洒。
16.根据一种优选地实施方式,所述拨开件包括活动连接于所述机械臂主体一侧端的第一拨开器和活动连接于所述机械臂主体另一侧端的第二拨开器。设置两个拨开器有利于拨开区域面积更大。
17.根据一种优选地实施方式,所述第一拨开器包括第一伸长推杆和第一伸张推杆,所述第一伸长推杆和所述第一伸张推杆铰接于机械臂主体的同一侧端,所述第一伸张推杆的活塞杆的端部铰接于所述第一伸长推杆的缸筒处。设置的两个推杆间彼此铰接,实现了拨开件可伸长到植被树干处的同时张开植被的作用。
18.根据一种优选地实施方式,所述第二拨开器包括第二伸长推杆和第二伸张推杆,所述第二伸长推杆和所述第二伸张推杆铰接于机械臂主体的同一侧端,所述第二伸张推杆的活塞杆的端部铰接于所述第二伸长推杆的缸筒处。
19.根据一种优选地实施方式,所述第一拨开器和所述第二拨开器关于所述机械臂主体的长轴对称。设置彼此对称的拨开器有利于拨开植被后喷药组件正对拨开区域中心,实现有效和精准喷涂。
20.根据一种优选地实施方式,所述机械臂主体包括依次铰接的第一臂杆、第二臂杆、第三臂杆和第四臂杆,所述舵机组包括第一舵机、第二舵机、第三舵机和第四舵机,所述第一舵机设置于所述机架上;所述第二舵机设置于所述第一臂杆和所述第二臂杆铰接处;所述第三舵机设置于所述第二臂杆和所述第三臂杆铰接处;所述第四舵机设置于所述第三臂杆和所述第四臂杆铰接处。四自由度机械臂转动角度更大,范围更广,设置舵机有利于通过
电信号控制其角度。
21.根据一种优选地实施方式,所述机械臂主体与所述第一舵机活动连接,有利于第一舵机的转动同时可以带动整个机械臂主体转动。
22.根据一种优选地实施方式,泵机为隔膜泵机。隔膜泵机可对中高粘度的药剂实现有效泵送,且有成本低耐腐蚀的优点。
23.根据一种优选地实施方式,所述喷药组件的喷头为雾化喷涂喷头。药剂雾化喷涂喷头有利于施药均匀。
24.本实用新型的有益技术效果:
25.第一,本实用新型提供的一种植保喷雾机械臂可控制机械臂上各支臂转动角度,对需要施药位置精确喷洒;
26.第二,本实用新型提供的一种植保喷雾机械臂能对被例如树叶遮挡住的树干进行喷涂药剂的操作;
27.第三,本实用新型提供的一种植保喷雾机械臂在有逆运动学和机器视觉等算法程序的控制下,可以实现对检测到的特定目标喷洒药雾的功能;机械臂可在控制器及驱动装置的操作下将末端执行器位置处的喷头送至距离目标一定距离内并对准目标;
28.第四,本实用新型提供的一种植保喷雾机械臂的机械臂部件可以整体转动,满足更多喷涂点的需求;
29.第五,本实用新型提供的一种植保喷雾机械臂实现精准靶向施药,与大面积全覆盖施药相比减少了许多药液的使用和浪费、药液利用率更高、药液对环境的污染更少,具有经济、高效、环保的优点。
附图说明
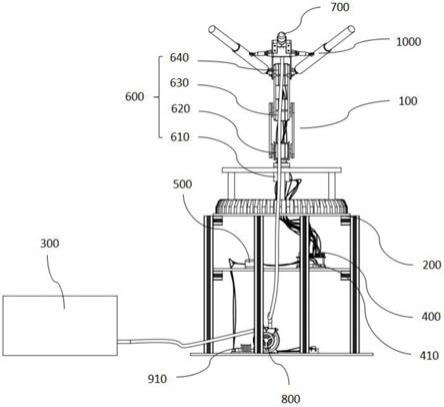
30.图1是本实用新型的整体结构示意图;
31.图2是本实用新型的机械臂主体结构及连接关系示意图;
32.图3是本实用新型的拨开件结构放大示意图;
33.图4是本实用新型的喷药组件结构示意图;
34.图5是本实用新型的电路的结构示意图;
35.图6是本实用新型的机械臂主体实现角度控制的顺序功能示意图。
36.说明书附图标记
37.100
‑
机械臂主体;200
‑
机架;300
‑
药箱;400
‑
控制板;500
‑
电池;600
‑
舵机组;700
‑
喷药组件;800
‑
泵机;900
‑
泵机驱动板;110
‑
第一臂杆;120
‑
第二臂杆;130
‑
第三臂杆;140
‑
第四臂杆;410
‑
稳压模块;610
‑
第一舵机;620
‑
第二舵机;630
‑
第三舵机;640
‑
第四舵机;710
‑
喷头;720
‑
转接头;1000
‑
拨开件;1100
‑
第一拨开器;1200
‑
第二拨开器;1110
‑
第一伸长推杆;1120
‑
第一伸张推杆;1210
‑
第二伸长推杆;1220
‑
第二伸张推杆。
具体实施方式
38.下面结合附图进行详细说明。
39.一种植保喷雾机械臂,在有逆运动学和机器视觉等算法程序的控制下,可以实现对检测到的特定目标喷洒药雾的功能。机械臂在控制器的驱动下将末端执行器位置处的喷
头送至距离目标一定距离内并对准目标;随后控制器控制电机驱动板使隔膜泵启动喷出药雾完成施药。也解决了不能对树干喷涂药剂的问题。本装置采用精准靶向施药,与大面积全覆盖施药相比减少了许多药液的使用和浪费、药液利用率更高、药液对环境的污染更少。具有经济、高效、环保的优点。根据说明书附图1所示,包括机械臂主体100、连接于机械臂主体100下的机架200以及药箱300。机械臂主体100以围绕机械臂主体100长轴转动的方式连接于机架200上端部,机架200内的放置板层设置有例如微控制器单元mcu的控制板400和电池500。机械臂主体100设置舵机组600,舵机组600。舵机组600的各舵机设置于机械臂各关节间。控制板400和电池500依次电连接,机械臂主体100一端设置有喷药组件700,喷药组件700与药箱300管连接,喷药组件700与药箱300间的管路上设置泵机800。电池500与控制板400连接的电路中设置有稳压模块410有利于防止接线错误且稳定电压。在控制板内预设定程序,有利于控制机械臂主体的转动角度,实现精准喷射药剂的目的。机械臂主体100的第四臂杆140的两侧处还设置有拨开件1000,拨开件1000的位置还可以在第一臂杆110、第二臂杆120或第三臂杆130两侧壁处,甚至可以设置于机架上,具体位置不做具体限定,仅表示可以实现树叶拨开功能的器件。
40.根据说明书附图1和3所示,拨开件1000包括活动连接于机械臂主体100一侧端的第一拨开器1100和活动连接于机械臂主体100另一侧端的第二拨开器1200,该活动连接可以是铰接或插销连接等。设置两个拨开器有利于拨开区域面积更大。
41.第一拨开器1100包括第一伸长推杆1110和第一伸张推杆1120,第一伸长推杆1110和第一伸张推杆1120铰接于机械臂主体100的同一左侧端,第一伸张推杆1120的活塞杆的端部铰接于第一伸长推杆1110的缸筒处。设置的两个推杆间彼此铰接,实现了拨开件可伸长到植被树干处的同时张开植被的作用。第一伸张推杆1120的作用为将活塞杆伸入植被树叶深处。第一伸张推杆1120的作用为将第一伸长推杆1110绕铰接点转动,使得第一伸张推杆1120实现拨开植被的功能。
42.第二拨开器1200包括第二伸长推杆1210和第二伸张推杆1220,第二伸长推杆1210和第二伸张推杆1220铰接于机械臂主体100的同一侧端,第二伸张推杆1220的活塞杆的端部铰接于第二伸长推杆1210的缸筒处。第二伸张推杆1220的作用为将活塞杆伸入植被树叶深处。第二伸长推杆1210的作用为将第二伸长推杆1210绕铰接点转动,使得第二伸张推杆1220实现拨开植被的功能。
43.第一拨开器1100和第二拨开器1200关于机械臂主体100的长轴对称。设置彼此对称的拨开器有利于拨开植被后喷药组件正对拨开区域中心,实现有效和精准喷涂。
44.拨开件1000的各个推杆可以都为液压杆或电动推杆,也可以同时包含液压杆和电动推杆。因为液压杆和电动推杆都为现有技术所公开,由此为液压杆或电动推杆提供动力来源的装置都不过多赘述和图示。
45.控制拨开件1000运动的动力装置的控制电路于控制板400连接。
46.根据说明书附图1和4所示,喷药组件700包括喷头710和转接头720。喷药组件700的喷头710为雾化喷涂喷头。喷头710通过转接头720与水管相连。喷头700和转接头720均固定在机械臂100的末端处,即喷头700与第四臂杆140固定连接。驱动机械臂各个臂杆运动的舵机通过信号线mcu的控制板400连接,接受从控制板上发来的舵机控制信号。电池500的12v电压通过稳压模块410后变为6v接到mcu控制板400上给舵机供电。电池500连接到泵机
驱动板900输入端上;泵机驱动板900的信号端与mcu控制板400连接,接收mcu控制板的控制信号;泵机驱动板900的输出端接在泵机800的电源端子上。泵机800出水口通过水管连接到转接头720上,入水口通过水管于药箱300连接。
47.喷药组件700起到将加压后药液雾化的作用。加压后的药液从出水口泵出,转接头720将5*8pu水管和喷头连接起来,药液通过转接头720进入喷头710后雾化成小液滴喷出。喷头710为1/4英寸内螺纹,孔径大小在0.6mm
‑
2.0mm之间。转接头720为5*8的水管接口和1/4英寸的外螺纹。
48.根据说明书附图1所示,泵机800一端通过电连接的方式与泵机驱动板900连接。泵机驱动板900与电池500电连接。泵机驱动板900的信号端与控制板400电连接。
49.整个装置工作的控制进程都由mcu控制板400里的控制程序完成,包括机械臂的运动和喷洒药雾两大功能。
50.根据说明书附图1、5和6所示,控制板400控制4个舵机的转动角度,每个舵机需要一组导线,一组导线有三根线:vcc电源,gnd地线,sin pwm信号线。电源和地线为舵机提供稳定的工作电压6v和电流1a左右,信号线通过输出不同占空比的pwm脉冲波来控制舵机角度。泵机驱动板为l298n模块。输入端口为12v电源和控制信号,输出端口连接泵机电源线,通过对其输入电平信号来控制12v电源输出的通断进而控制泵机工作状态。
51.电源电路部分由12v电池和lm2596稳压模块构成,电池接在稳压模块的输入端,通过调节稳压模块可调电阻来调节输出端电流电压。
52.机械臂主体100的关节上装有舵机,通过舵机的转动来带动机械臂运动到预定姿态并保持。舵机的转动角度通过mcu控制板400发送pwm波到舵机来控制舵机角度。
53.喷雾系统工作过程中,泵机800抽取药箱300,将加压后的药液通过喷药组件700喷射出来后实现雾化。电池500输出12v电压的电源端接在泵机驱动板900输入端为泵机800提供工作电压。mcu控制板400管脚控制泵机驱动板900通断来实现对泵机800供电的通断控制。
54.泵机800的入水口尺寸为8mm、泵机800的出水口尺寸为5mm、电机工作电压为12v、额定功率60w。可将药箱中的药液抽取到泵中并加压后从出水口排出。泵机800起到抽液和加压作用。
55.机械臂主体100为四自由度机械臂,机械臂主体100的一端搭载喷头和供液软管,是主要的运动装置。通过位于四个关节处舵机的驱动使喷出的药液水雾可以到达空间中的相应位置。
56.根据说明书附图2所示,机械臂主体100包括依次铰接的第一臂杆110、第二臂杆120、第三臂杆130和第四臂杆140,舵机组600包括第一舵机610、第二舵机620、第三舵机630和第四舵机640,第一舵机610设置于机架200上;第二舵机620设置于第一臂杆110和第二臂杆120铰接处;第三舵机630设置于第二臂杆120和第三臂杆130铰接处;第四舵机640设置于第三臂杆130和第四臂杆140铰接处。机械臂主体100通过第一臂杆110与第一舵机610连接的方式与机架200连接。
57.优选地,泵机800为栓塞式泵中的隔膜泵机。泵机800也可以是其它可以抽药液的泵机。
58.工作原理:
59.mcu控制板400通过目标位置使用dh建模和逆运动学计算方法得到机械臂主体100各个关节处舵机转动角度,并驱动机械臂主体100运动,机械臂主体100姿态稳定后mcu控制板400控制泵机驱动板将额定电压为12v的电池500工作电源接在泵机上使喷药组件700的喷头710喷出的水雾可以覆盖到目标目标位置。舵机的工作电压6v由电池500和稳压模块410提供。
60.其后通过拨开件1000完成植被拨开操作,进而实现对例如树干的喷药目的。
61.需要注意的是,上述具体实施例是示例性的,本领域技术人员可以在本实用新型公开内容的启发下想出各种解决方案,而这些解决方案也都属于本实用新型的公开范围并落入本实用新型的保护范围之内。本领域技术人员应该明白,本实用新型说明书及其附图均为说明性而并非构成对权利要求的限制。本实用新型的保护范围由权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1