一种柑橘采摘机器人三指球型末端执行器
1.本实用新型涉及果实采摘技术领域,具体涉及一种柑橘采摘机器人三指球型末端执行器。
背景技术:
2.目前,我国果园面积和水果产量位居世界首列,但是水果种植管理基本依赖人工。其中水果采收就属于高耗劳动力任务,需要大量的农村劳动力参与,但是随着人口老龄化趋势,直接从事农业劳动的人口逐渐减少,使成本不断升高。柑橘的采摘主要依靠人工操作,但因绝大多数的果树树形大,枝叶茂盛,采摘效率低、质量差。现有的柑橘采摘机械存在夹持果实进行拉拽,采摘效率较低、损伤率高。为了解决这些问题提出了一种三指球型末端采摘执行器。
技术实现要素:
3.本实用新型针对上述问题,提供一种柑橘采摘机器人三指球型末端执行器,解决了在柑橘采摘过程中采摘效率较低、损伤率高的问题。
4.本实用新型采用的技术方案为:一种柑橘采摘机器人三指球型末端执行器,包括切割装置、放置装置、传动机构和动力系统;所述切割装置安装在放置装置上,所述放置装置通过传动机构控制开合,所述传动机构通过动力系统驱动;所述放置装置包括弧形放置板、压力传感器、安装座和托盘;所述安装座边缘处均匀设有至少三个弧形放置板,所述弧形放置板第一端与安装座铰接,所述弧形放置板第二端安装切割装置,其中一个所述弧形放置板内安装有压力传感器,所述安装座上设有托盘;至少三个所述切割装置闭合时可组成封闭结构;所述传动机构包括滚珠丝杠、螺母座和支撑座;所述安装座底部连接有支撑座,所述支撑座底部连接有滚珠丝杠,所述滚珠丝杠上套设有相配合的螺母座,所述螺母座外设有与弧形放置板相配合的固定杆,所述固定杆另一端通过连杆与弧形放置板外壁铰接;所述滚珠丝杠通过动力系统驱动。
5.进一步地,切割装置包括扇形固定座和刀片,所述弧形放置板第二端可拆卸的安装有扇形固定座,所述扇形固定座一侧设有刀片,所述扇形固定座另一侧设有与刀片相配合的刀槽,所述刀片与相邻扇形固定座的刀槽可拆卸连接。
6.进一步地,所述弧形放置板内侧和托盘上均设有硅胶缓冲材料层,所述压力传感器安装在硅胶缓冲材料层上。
7.进一步地,所述动力系统为步进电机,所述步进电机安装于电机支架中,所述步进电机和压力传感器均与待用机器人电性连接,所述步进电机通过压力传感器控制开闭;所述滚珠丝杠外包裹有保护壳,所述保护壳一端与安装座连接,所述保护壳另一端与电机支架连接。
8.进一步地,所述保护壳上设有与固定杆相配合的滑动槽,所述固定杆滑动连接的设置在滑动槽内。
9.进一步地,所述弧形放置板外壁设有凸起,所述凸起与连杆铰接。
10.进一步地,所述弧形放置板第二端设有安装槽,所述扇形固定座通过螺钉安装在安装槽内。
11.进一步地,所述滚珠丝杠与步进电机的输出轴通过联轴器连接。
12.进一步地,所述安装座与支撑座通过螺栓连接。
13.进一步地,所述弧形放置板第一端与安装座通过销钉铰接。
14.本实用新型的优点:本实用新型提供了一种柑橘采摘机器人三指球型末端执行器,通过弧形放置板组成的空间能更好的包络果实,通过动力系统即步进电机驱动滚珠丝杠转动,螺母座随着步进电机正反转做往复直线运动带动带动连杆运动,三个弧形放置板在连杆的驱动下实现张合,弧形放置板闭合时三个切割装置同时闭合,三个切割装置两两配合,刀片进入相邻的刀槽内,实现果柄的分离;通过硅胶缓冲层和压力传感器的使用能大大降低采摘时果实的损伤率;本实用新型整体结构简单,运行效率高,能避免果实受损,实现柔性采摘,使用与各类球型果蔬采摘,具有实际的使用推广意义和经济价值。
15.除了上面所描述的目的、特征和优点之外,本实用新型还有其它的目的、特征和优点。下面将参照图,对本实用新型作进一步详细的说明。
附图说明
16.构成本技术的一部分的附图用来提供对本实用新型的进一步理解,本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。
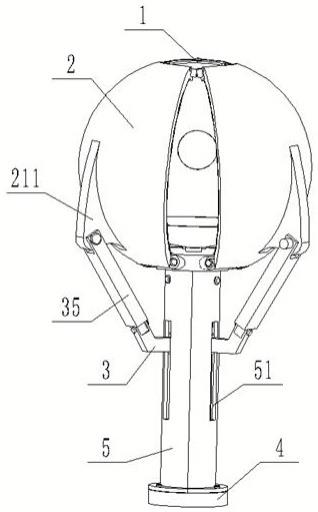
17.图1是本实用新型的整体结构闭合状态示意图;
18.图2是本实用新型的整体结构张开状态示意图;
19.图3是本实用新型的传动机构结构示意图;
20.图4是本实用新型的弧形放置板结构示意图;
21.图5是本实用新型的切割装置结构示意图。
22.附图标记:
[0023]1‑
切割装置、2
‑
放置装置、3
‑
传动机构、4
‑
动力系统、5
‑
保护壳;11
‑
扇形固定座、12
‑
刀槽、13
‑
刀片;21
‑
弧形放置板、22
‑
压力传感器、23
‑
安装座、24
‑
托盘;31
‑
滚珠丝杠、32
‑
螺母座、33
‑
支撑座、34
‑
固定杆、35
‑
连杆;51
‑
滑动槽;211
‑
凸起、212
‑
安装槽。
具体实施方式
[0024]
为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本实用新型,并不用于限定本实用新型。
[0025]
在本实用新型的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
[0026]
参考图1至图5,一种柑橘采摘机器人三指球型末端执行器,包括切割装置1、放置装置2、传动机构3和动力系统4;切割装置1用于切割将果柄切断,切割装置1安装在放置装
置2上,放置装置2用于收集切割装置1切割掉落的柑橘,放置装置2通过传动机构3控制开合,传动机构3通过动力系统4驱动;放置装置2包括弧形放置板21、压力传感器22、安装座23和托盘24;安装座23边缘处均匀设有至少三个弧形放置板21,优选的,弧形放置板21数量为三个,弧形放置板21第一端与安装座23铰接,优选的,弧形放置板21第一端与安装座23通过销钉铰接,弧形放置板21第二端安装切割装置1,其中一个弧形放置板21内安装有压力传感器22,压力传感器22为柔性薄膜压力传感器,压力传感器22连接控制器并设有安全阈值,防止弧形放置板21加持力超过果实承受极限损伤果实;安装座23上设有托盘24;至少三个切割装置1闭合时可组成封闭结构,即三个切割装置1闭合时可组成封闭结构,切割装置1包括扇形固定座11和刀片13,弧形放置板21第二端可拆卸的安装有扇形固定座11,优选的,弧形放置板21第二端设有安装槽212,扇形固定座11通过螺钉安装在安装槽212内;扇形固定座11一侧可拆卸的安装有刀片13,扇形固定座11另一侧设有与刀片13相配合的刀槽12,刀片13与相邻扇形固定座11的刀槽12可拆卸连接;即三个切割装置1两两配合形成一个完整的、可实现切割功能的切割设备;传动机构3包括滚珠丝杠31、螺母座32和支撑座33;安装座23底部连接有支撑座33,优选的,安装座23与支撑座33通过螺栓连接,支撑座33底部转动连接有滚珠丝杠31,滚珠丝杠31上套设有相配合的螺母座32,螺母座32外连接有与弧形放置板21相配合的固定杆34,固定杆34另一端通过连杆35与弧形放置板21外壁铰接;滚珠丝杠31通过动力系统4驱动,优选的,动力系统4为步进电机,滚珠丝杠31与步进电机的输出轴通过联轴器连接,步进电机安装于电机支架中,步进电机和压力传感器22均与待用机器人电性连接,通过待用机器人中蓄电池提供能源,步进电机通过压力传感器22控制开闭;滚珠丝杠31外包裹有保护壳5,保护壳5一端与安装座23连接,保护壳5另一端与电机支架连接,电机支架与待用机器人的机械臂连接;保护壳5上设有与固定杆34相配合的滑动槽51,固定杆34滑动连接的设置在滑动槽51内,一方面使得螺母座32只能发生转动,另一方面防止固定杆34运动过程中受到干涉。
[0027]
本实用新型提供了一种柑橘采摘机器人三指球型末端执行器,使用时,将果实放置入三个弧形放置板21组成的空间内,步进电机驱动滚珠丝杠31转动,螺母座32随着步进电机正反转做往复直线运动带动固定杆34在滑动槽51内滑动,固定杆34带动连杆3运动,三个弧形放置板21在连杆3的驱动下实现张合,螺母座32向上移动带动连杆3驱动弧形放置板21闭合,弧形放置板21闭合时三个切割装置1同时闭合,三个切割装置1两两配合,刀片13进入相邻的刀槽12内,可实现果柄的分离,托盘24与三个弧形放置板21配合收集切断果梗后掉落的果实,由此实现果实夹持与果梗切割,螺母座32向下移动带动连杆3驱动弧形放置板21打开,并进一步运送到收集装置中;并且在使用时选择型号为rfp602的柔性薄膜压力传感器,三个弧形放置板21闭合,切割装置1工作过程中,柔性薄膜压力传感器反馈的电压不断升高,其值通过模拟量输入端口反馈到主控制器,与设定的安全阈值不断进行比较,当超过安全阈值后,脉冲发生器停止输出脉冲信号,步进电机停止转动,避免果实被过度夹持损伤,末端执行器将收获的果实运送到指定收集装置,一次采摘作业结束。
[0028]
本实用新型的一实施例中,弧形放置板21内侧和托盘24上均设有硅胶缓冲材料层,压力传感器22安装在硅胶缓冲材料层上,硅胶缓冲材料层起到保护果实表皮的作用,并且托盘24内的硅胶缓冲材料层承托果柄分离后后的果实起到缓冲保护作用,硅胶缓冲层和柔性薄膜压力传感器起到双重保护作用。
[0029]
本实用新型的一实施例中,弧形放置板21外壁设有凸起211,凸起211与连杆35铰接,使得连杆35更加方便的控制弧形放置板21开合。
[0030]
本实用新型的一实施例中,三个弧形放置板21组成的空间大小与待放置的果实相配合设置。
[0031]
本实用新型提供了一种柑橘采摘机器人三指球型末端执行器,通过弧形放置板21组成的空间能更好的包络果实,通过动力系统4步进电机驱动滚珠丝杠31转动,螺母座32随着步进电机正反转做往复直线运动带动带动连杆3运动,三个弧形放置板21在连杆3的驱动下实现张合,弧形放置板21闭合时三个切割装置1同时闭合,三个切割装置1两两配合,刀片13进入相邻的刀槽12内,实现果柄的分离;通过硅胶缓冲层和压力传感器的使用能大大降低采摘时果实的损伤率;本实用新型整体结构简单,运行效率高,能避免果实受损,实现柔性采摘,使用与各类球型果蔬采摘,具有实际的使用推广意义和经济价值。
[0032]
以上所述仅为本实用新型的较佳实施例,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1