智能鱼类计数器
1.本实用新型涉及一种智能鱼类计数器,属于文化体育用品领域,尤其是一种用于钓鱼比赛中各种鱼的计数器。
背景技术:
2.目前钓鱼比赛中所有鱼的计数都是由人工完成,工作量繁重并且容易数错。随着人们生活水平的提高,文化体育娱乐活动日渐丰富,参加钓鱼比赛活动的人越来越多,钓鱼比赛赛事也日益频繁。一场比赛常常有二、三百名选手,大型比赛多达五百多名选手。比赛中对各个选手钓到的鱼需要进行计数,计数要求准确、快速,并且不能伤害到鱼,数完之后要放归鱼池。比赛中,不同种类和大小的鱼混杂在一起,鱼的计数工作量繁重,并且容易出错。比赛中对各种混杂在一起的鱼的条数的计数方面,需要一种快速、准确的替代人工的自动化鱼类计数装置。
技术实现要素:
3.本实用新型是要提供一种智能鱼类计数器,可以实现不同种类和大小混杂在一起的鱼条尾数的计数,对鱼没有损伤。该智能鱼类计数器由装鱼漏斗、滑道、盛鱼器、盖板和图像处理模块组成,图像处理模块上装有led光源、摄像头和液晶显示屏。
4.为实现上述目的,本实用新型的技术方案是:一种智能鱼类计数器,包括装鱼漏斗、盛鱼器、滑道底座、盖板、图像处理模块,所述装鱼漏斗下部前侧面设有鱼落入鱼滑道的开口,所述装鱼漏斗下部与滑道底座的平台通过连活页铰接,使装鱼漏斗的倾斜角度可调,所述装鱼漏斗的后侧面从上至下设有若干个凸起的铁环,所述装鱼漏斗由连杆支撑,所述连杆一端挂在装鱼漏斗的凸起的铁环上,另一端挂在滑道底座上的铁环上,通过调节连杆在装鱼漏斗后侧面上不同的支撑位置,能够调节装鱼漏斗的倾斜角度;所述滑道底座上设有一个斜坡平面形成鱼滑道,所述鱼滑道上端位于装鱼漏斗的开口下方,下端位于盛鱼器上方;所述滑道底座上面设有盖板,所述盖板上面装有图像处理模块,所述图像处理模块上装有液晶显示屏,所述盖板内部装有摄像头和led光源,所述图像处理模块上设有启动计数按钮和暂停按钮;启动计数按钮后,所述光源照亮鱼滑道,所述摄像头将采集到的图像传送到图像处理模块,液晶显示屏显示计数结果。
5.进一步,所述斜坡平面与滑道底座的底面成30度角。
6.进一步,所述斜面平面上铺设有光滑的塑胶。
7.进一步,所述斜面平面上安装传送带,传送带连接电机,由电机控制传送带的移动速度。
8.进一步,所述装鱼漏斗的后侧面上设有两个把手。
9.进一步,所述滑道底座下面设有四个对称放置的轮子。
10.进一步,所述盛鱼器中事先放些水,能减小对鱼的损伤,起到缓冲作用。
11.进一步,对鱼类条数进行计数时,所述滑道底座下面加设可移动的垫块,用于所述
装鱼漏斗装满鱼后,防止滑道底座失重侧翻。
12.进一步,所述图像处理模块为采用卡尔曼滤波方法进行跟踪的图像处理模块。
13.进一步,所述图像处理模块采集到的滑道视场图像,沿滑道垂直方向分为部分,第一部分为鱼进入第ⅰ区域后,开始提取鱼的质心,并跟踪的部分;第二部分为跟踪的鱼质心进入第ⅱ区域后,进行计数的部分;第三部分为跟踪的鱼质心进入第ⅲ区域后,持续跟踪的部分。
14.本实用新型的有益效果是:智能鱼类计数器可以自动对鱼进行计数,解放了人工劳动,提高了效率。该智能鱼类计数器可以实现不同种类和大小混杂在一起的鱼的条尾数的计数,对鱼没有损伤,装置简单,可移动,方法智能,易于实现。该智能鱼类计数器的装鱼漏斗倾角可以调节,方便将鱼按照需要的速度滑入滑道。该鱼类计数器下部装有轮子,可以电池供电,方便在钓场移动,到各个钓鱼选手处进行钓鱼计数。鱼类计数器滑道上铺有润滑塑胶,加水后摩擦力小,计数方法不损伤鱼。与其他计数器相比,采用摄像头拍摄图像处理的方法更智能,能对混杂在一起的不同大小的鱼同时进行计数,方法便捷,对鱼没有损伤。
附图说明
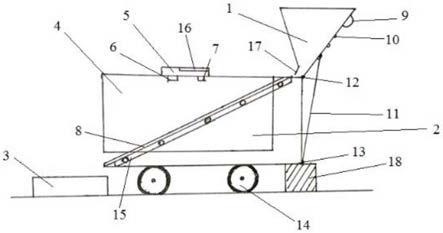
15.图1是智能鱼类计数器侧面的示意图;
16.图2是智能鱼类计数器的滑道图像的感兴趣区域的示意图;
17.图3是智能鱼类计数器三维立体结构的示意图。
具体实施方式
18.下面参照附图进行详细说明,全文中的相同参考标记表示相同的部件。
19.如图1所示,本实用新型的智能鱼类计数器由装鱼漏斗1、滑道底座2、盛鱼器3和盖板4组成。装鱼漏斗1的侧面有两个把手9(图中显示一个,另一个在侧面对称位置),在该侧面装有若干个固定铁环10,例如漏斗侧面两边对称各有3个铁环,共6个。装鱼漏斗1由连杆11支撑,连杆11一端挂在铁环10上,另一端挂在滑道底座上的铁环13上。连杆11共有2根,在装鱼漏斗的侧面对称放置,连接漏斗和滑道底座。装鱼漏斗1的下部和滑道底座2通过活页12相连。计数器不使用的时候,装鱼漏斗1通过活页12可以放到滑道底座侧面,折叠放置。通过将连杆11挂在不同高度的铁环10上,可以调节漏斗的倾角,便于控制鱼缓慢滑入滑道的速度。在装鱼漏斗1的前侧面开口处,装有几个塑胶挡板17,对鱼有一定阻力,防止鱼快速滑入滑道,造成拥塞。
20.滑道底座2有一个斜坡平面,与滑道的底面(即地面水平线)成30度角,斜面上铺设光滑的塑胶8,使用时塑胶8上可以洒水,增加润滑性,减小对鱼的损伤。更进一步,如果需要控制鱼的滑动快慢,在滑道斜面塑胶8的位置可以安装传送带15,替换塑胶8,用电机控制传送带的移动速度。传送带15是可选项。滑道底座2下面有四个轮子14,对称放置,便于移动计数器。鱼从装鱼漏斗1沿滑道上的塑胶8滑入盛鱼器3,盛鱼器3中可以事先放些水,减小对鱼的损伤,起到缓冲作用。对鱼类条数进行计数时,装鱼漏斗1装满鱼后,为防止滑道底座失重侧翻,可以在滑道底座2下面加可以移动的垫块18。
21.盖板4上面装有图像处理模块5,图像处理模块5上装有液晶显示屏16。盖板内部装有摄像头6和led光源7。图像处理模块上有启动计数按钮和暂停按钮。启动计数按钮后,光
源7照亮滑道,摄像头6采集到的图像传送到图像处理模块5,计数结果显示在液晶显示屏16上。
22.图像处理模块对鱼计数如图2所示。图2是摄像头采集的滑道图像的示意图,沿鱼从装鱼漏斗滑入的方向,即图2中y方向,在采集到的图像上划a、b、c、d四条直线,直线方向垂直于滑道长边,将滑道图像分为ⅰ、ⅱ、ⅲ三个区域。例如,如图2所示,在图像长度的1/4处划a直线,在3/4处划d直线,在图像长度中心点到a的中点处划b直线,在图像长度中心点到d的中点处划c直线。取a和b两条直线之间的区域为第ⅰ区域,取b和c之间的为第ⅱ区域,取c和d之间的为第ⅲ区域。
23.图像处理模块5对采集到的图像,首先进行预处理,包括图像增强,感兴趣区域提取。图像增强采用灰度变换。如果源图像像素的灰度值d(x,y),处理后图像像素的灰度值d’(x,y),灰度变换可表示为:d’(x,y)=f[d(x,y)],其中,x,y是像素点坐标,函数f称为灰度变换函数。这里采用非线性变换函数,f(g)=g+0.8*g*(255-g)/255,其中g表示灰度值。感兴趣区域(roi)的提取在采集到的图像上取长方形区域,如图2所示。感兴趣区域(roi)的长度是原始图像长度,roi的宽度是滑道的宽度,以原始图像宽度的中点为中心,通过实际采集的图像确定。然后对感兴趣区域roi图像进行灰度阈值分割、形态学腐蚀和膨胀处理,再进行二值化,筛选区域面积大于阈值的作为候选鱼区域。灰度阈值分割根据图像的直方图,分割出鱼的区域。经过腐蚀和膨胀处理后,可以平滑区域边缘,去掉小的噪声点。二值化处理以后,可以提取出分离的候选鱼目标。然后筛选区域像素面积大于阈值的区域,作为候选鱼区域,提取质心,用于下一步跟踪。在第ⅰ区域内,提取面积大于阈值的候选鱼区域的质心,并跟踪。在第ⅱ区域内,当跟踪的鱼质心由b直线到达c直线后,进行计数。在第ⅲ区域内,对面积大于阈值的候选鱼区域,取质心,持续跟踪,直到鱼质心到达直线d以后,停止跟踪。记录鱼的质心坐标,采用卡尔曼滤波方法进行跟踪。卡尔曼滤波运动目标跟踪方法可以跟踪在滑道上滑动的鱼,跟踪方法详见发明专利“基于背景估计的公交乘客运动目标检测方法”(专利号201010177661.3)。对卡尔曼滤波得到的每个运动的鱼的质心建立跟踪链。对下一帧中求得的运动目标,若其质心与跟踪链中运动目标质心之间的距离在阈值范围内,判断为同一条鱼,否则作为新的目标。
[0024]
当一次计数结束,按暂停键,此时将计数结果通过液晶显示屏16显示。再次按暂停键,启动下一次鱼的计数,同时计数器清零,开始重新计数。
[0025]
如图3所示,是智能鱼类计数器的三维立体示意图。图3中装鱼漏斗1由4个侧面构成。adhg和bchg是梯形面,ad和bc边分别是两个梯形的长边。abcd是梯形,bc是长边。例如:abcd梯形的长边bc为0.5米,短边ad为0.35米,该梯形高0.4米。abg和dch是两个相等的三角形面。efgh是在adhg平面上的开口,是鱼的出口,在ef这条边上装若干个塑胶挡板17,例如5个,用来防止鱼过快滑入滑道。盖板是长方体结构,顶面是mghn,在顶面上有开口ijlk,是鱼进入滑道的入口。盖板上的平台区域ghji对鱼起到缓冲作用,避免鱼大量快速进入滑道,影响计数。滑道的斜面是ijpo,与地面成30度角。例如滑道底座2的长宽高为1.73*0.25*1米。盖板侧面的qrpo是开口,鱼沿滑道从这个开口进入盛鱼器3中。滑道底座装有4个轮子。装鱼漏斗侧面有2个把手9,6个对称分布的铁环10。两个连杆11连接在滑道底座的铁环13和漏斗铁环10上,用于支撑装鱼漏斗。两个可移动的垫块18用来防止计数器底座因失重发生侧翻。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1