一种灌溉机器人
1.本实用新型涉及农业灌溉技术领域,特别涉及一种灌溉机器人。
背景技术:
2.给农作物灌溉沼液是因为沼液中含有90%以上的水分,施用沼液可减少作物的灌溉用水,起到节约水资源的作用,同时沼液中含有丰富的蛋白质、氨基酸、糖类、腐殖酸、维生素、植物激素和抑制病虫害活性的物质,是作物良好的生长促进剂,既可增强作物对干旱、冷冻等非生物逆境和病虫害生物逆境的抗性,也可对形成土壤团粒结构起到重要作用,并可络合其他营养成分,减缓营养物质流失,此外,沼液还具有调节土壤酸碱度,增强土壤微生物活性和降低土壤重金属毒性等作用。
3.目前的沼液灌溉方式主要是人工灌溉和滴灌灌溉,人工灌溉式简单粗放,人工投入大,水分养分利用效率低,采用人工灌溉沼液的方式,不仅劳动强度大、灌溉量无法精准控制,还会由于长期接触沼液对人体健康产生一定影响;采用传统滴灌模式灌溉过程中,沼液中含有的有机悬浮颗粒容易堵塞滴头,降低了灌溉均匀度,影响灌溉效果。
技术实现要素:
4.本实用新型提供的一种灌溉机器人,适用于投放在温度大棚、田间地头等设有灌溉穴孔的种植田地,能够实现对每棵植株较为精准的沼液水肥一体化灌溉施肥。
5.本实用新型提供了一种灌溉机器人,包括:
6.底盘;
7.储液装置,包括储液桶和搅拌机构,储液桶固定于底盘上端,储液桶的出液口连接有输液组件,输液组件上设置有电磁阀,输液组件的自由端设置有湿度传感器,湿度传感器用于检测灌穴处的土壤湿度,储液桶内设置有搅拌机构,用于搅拌储液桶内的液体;
8.机械臂,一端连接于底盘或储液桶上,另一端夹持输液组件,机械臂与动力机构连接,以驱动机械臂带动输液组件的上下移动;
9.处理器,分别与电磁阀、搅拌机构、湿度传感器和动力机构信号连接;
10.电源,分别与动力机构、搅拌机构及处理器电性连接。
11.可选的,搅拌机构包括:
12.驱动电机,固定于底盘上,驱动电机的输出轴竖直向上设置,处理器与驱动电机信号连接,驱动电机与电源电连接;
13.搅拌杆,下端与驱动电机的输出轴轴连接,上端延伸入储液桶内,搅拌杆上固连有多个搅拌叶。
14.可选的,输液组件包括:
15.软管,第一端与储液桶的出液口固连;
16.刚性管,第一端与软管的第二端固连,刚性管的第二端可拆卸的连接有喷头,湿度传感器设于刚性管靠近喷头处,机械臂的另一端夹持刚性管。
17.可选的,喷头的下端为尖角状。
18.可选的,还包括:
19.电气箱,固定于底盘上,处理器和电源均固定于电气箱内,电气箱内设置有温度传感器,温度传感器用于检测电气箱内的温度,电气箱的箱壁上具有散热孔,电气箱内安装有散热风扇,温度传感器和散热风扇分别与处理器信号连接,散热风扇与电源电连接,当温度传感器检测到的温度高于预设温度时,微处理器控制散热风扇打开,当温度传感器检测到的温度小于或等于预设温度时,处理器控制散热风扇关闭。
20.可选的,还包括设置于底盘下端的行走机构,行走机构与处理器信号连接,行走机构与电源电连接,行走机构带动底盘移动。
21.可选的,行走机构包括轮式行走机构或履带式行走机构,轮式行走机构或履带式行走机构与底盘可拆卸连接。
22.可选的,储液桶的外壁覆盖一层光伏发电薄膜,电源为蓄电池,光伏发电薄膜与蓄电池连接。
23.可选的,机械臂为两个,分别对称设置于底盘的左右侧。
24.可选的,还包括设置于储液桶侧壁上的摄像头,摄像头与处理器信号连接,用于实时摄取地面图片。
25.与现有技术相比,本实用新型的有益效果在于:本实用新型通过设置的储液桶能够将沼液水肥等存储在其中,当需要对植株进行灌溉时,通过搅拌机构对储液桶内的液体进行搅拌,通过将输液组件插入穴孔中,并打开电磁阀使经搅拌的液体能够灌溉穴孔内的土壤,通过湿度传感器实时检测土壤湿度,当湿度达到预设的湿度时,则说明灌溉量已达标,则处理器控制电磁阀关闭,从而实现了对每棵植株较为精准的沼液水肥一体化灌溉施肥,克服了现有技术中水、沼液一体化穴灌技术人工投入大、效率低且灌溉量难以精准控制的问题,主要用于投放在温室大棚、田间地头等设有灌溉穴孔的种植田地,实现智能化的沼液水肥一体精准穴灌,搅拌机构能够避免在进行沼液灌溉时防止沼液沉淀,避免有机悬浮颗粒造成的堵塞问题。
附图说明
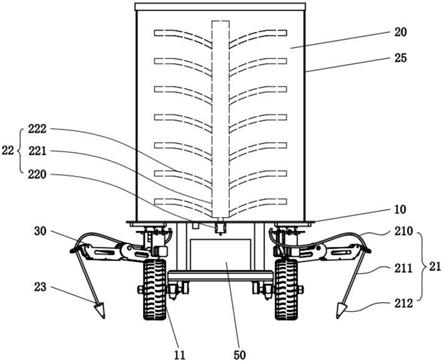
26.图1为本实用新型实施例提供的一种灌溉机器人的主视图;
27.图2为本实用新型实施例提供的一种灌溉机器人的俯视图;
28.图3为本实用新型实施例提供的机械臂的结构示意图;
29.图4为本实用新型实施例提供的电气箱的内部结构示意图;
30.图5为本实用新型实施例提供的一种灌溉机器人的控制流程图。
具体实施方式
31.下面结合附图,对本实用新型的一个具体实施方式进行详细描述,但应当理解本实用新型的保护范围并不受具体实施方式的限制。
32.在本实用新型的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是
为了便于描述本实用新型的技术方案和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
33.如图1
‑
2所示,本实用新型实施例提供的一种灌溉机器人,包括:底盘10、储液装置、机械臂30、处理器40和电源53,储液装置包括储液桶20和搅拌机构22,储液桶20固定于底盘10上端,储液桶20的出液口连接有输液组件 21,输液组件21上设置有电磁阀,输液组件21的自由端设置有湿度传感器23,湿度传感器23用于检测灌穴处的土壤湿度,储液桶20内设置有搅拌机构22,用于搅拌储液桶20内的液体,机械臂30的一端连接于底盘10或储液装置上,另一端夹持输液组件21,机械臂30与动力机构连接,以驱动机械臂30带动输液组件21的上下移动,处理器40分别与电磁阀、搅拌机构22、湿度传感器 23和动力机构信号连接,当湿度传感器23检测到的土壤湿度小预设湿度时,则处理器控制搅拌机构22开始搅拌并同时控制电磁阀开启,并通过控制动力机构驱动机械臂30带动输液组件21向下移动固定距离使输液组件21部分插入土壤中对土壤进行灌溉,当湿度传感器23检测到的土壤湿度大于或等于预设湿度时,则处理器控制电磁阀关闭,并控制动力机构驱动机械臂30带动输液组件21向上移动至固定高度,电源53分别与动力机构、搅拌机构22 及处理器40电性连接,在本实施例中,处理器40为stms32单片机。
34.本实用新型通过设置的储液桶能够将沼液水肥等存储在其中,当需要对植株进行灌溉时,通过搅拌机构对储液桶内的液体进行搅拌,通过将输液组件插入穴孔中,并打开电磁阀使经搅拌的液体能够灌溉穴孔内的土壤,通过湿度传感器实时检测土壤湿度,当湿度达到预设的湿度时,则说明灌溉量已达标,则处理器控制电磁阀关闭,从而实现了对每棵植株较为精准的沼液水肥一体化灌溉施肥,克服了现有技术中水、沼液一体化穴灌技术人工投入大、效率低且灌溉量难以精准控制的问题,主要用于投放在温室大棚、田间地头等设有灌溉穴孔的种植田地,实现智能化的沼液水肥一体精准穴灌,搅拌机构能够避免在进行沼液灌溉时防止沼液沉淀,避免有机悬浮颗粒造成的堵塞问题。
35.可选的,搅拌机构22包括:驱动电机220和搅拌杆221,驱动电机220 固定于底盘10上,驱动电机220的输出轴竖直向上设置,处理器40与驱动电机220信号连接,驱动电机220与电源53电连接,搅拌杆221的下端与驱动电机220的输出轴轴连接,上端延伸入储液桶20内,搅拌杆221上固连有多个搅拌叶222,在搅拌杆221与底盘10接口处设有密封圈,防止沼液从中渗出,在其底盘10部分通过螺栓连接方式设置有用于驱动搅拌杆221转动的驱动电机220,将搅拌杆221底端通过滚齿轮进行固定连接。
36.可选的,输液组件21包括:软管210和刚性管211,软管210的第一端与储液桶20的出液口固连,刚性管211的第一端与软管210的第二端固连,刚性管211的第二端可拆卸的连接有喷头212,湿度传感器23设于刚性管211靠近喷头212处,机械臂30的另一端夹持刚性管211,将湿度传感器23设置在刚性管211上,避免其与喷头212距离较近,避免检测的土壤湿度不准确,这样机械臂30则将刚性管211的下部和喷头212均插入土壤中,使灌溉从较深处开始,满足对植株深层灌溉的需求。
37.可选的,喷头212的下端为尖角状,便于插入土壤中。
38.参考图4,还包括电气箱50,电气箱50固定于底盘10上,处理器40和电源53均固定于电气箱50内,电气箱50内设置有温度传感器51,温度传感器51用于检测电气箱50内的温度,电气箱50的箱壁上具有散热孔,电气箱 50内安装有散热风扇52,温度传感器51和散热
风扇52分别与处理器40信号连接,散热风扇52与电源53电连接,当温度传感器51检测到的温度高于预设温度时,处理器控制散热风扇52打开,当温度传感器51检测到的温度小于或等于预设温度时,处理器控制散热风扇52关闭,电气箱50可以放置电器元件,起到防护作用,同时处理器的工作温度一般为40
‑
80℃,由于大棚内温度较高,为了避免温度过高导致处理器无法工作,通过散热风扇52及时散热降温,同时电气箱50起到平衡作用。
39.可选的,还包括设置于底盘10下端的行走机构11,行走机构11与处理器信号连接,行走机构11与电源53电连接,行走机构11带动底盘10移动。
40.可选的,行走机构11包括轮式行走机构或履带式行走机构,轮式行走机构或履带式行走机构与底盘10可拆卸连接,当在平地行走时可采用轮式行走机构,若需要越障则可更换为履带式行走机构,提升机器人的整体平稳性能。
41.可选的,储液桶20的外壁覆盖一层光伏发电薄膜25,电源53为蓄电池,光伏发电薄膜25与蓄电池连接,采用外部覆膜且可搅拌储液桶20,可以防止沼液沉淀或内部气体泄漏发生危险,通过光电效益发电为电源53(蓄电池)充电,从而实现电量的自给自足,以保证机器人更长时间的续航,节能环保。
42.可选的,机械臂30为两个,分别对称设置于底盘10的左右侧,能够满足同时给左右两个灌穴同时灌溉。
43.参考图3,机械臂30包括:底座300、支撑臂301、大臂302和小臂303,底座300固定于底盘10上,支撑臂301竖直连接于底座300的上端,大臂302 第一端与支撑臂301的上端相铰接,小臂303第一端与大臂302的第二端铰接,第二端通过转动副链接有水平夹爪304,水平夹爪304夹持输液组件21,大臂 302为主动件采用伺服电机来实现手臂摆动、回转,小臂303为从动部件经传动杆传动,实现手臂的摆动,机械臂采用主从控制方式,以at89s52为主控制器,psc伺服控制器为从控制器。
44.可选的,还包括设置于储液桶20侧壁上的摄像头,摄像头与处理器信号连接,用于实时摄取地面图片,通过摄像头实时摄取的图片信息判断当前位置是否为灌穴,若是的话,则进行灌溉操作。
45.使用方法及工作原理:参考图5,灌溉机器人由处理器操控履带或行走轮行走,再由处理器控制电磁阀,使电磁阀操控机械臂,进行养料灌溉,机械臂下部夹有输液管,输液管内部的养料通过储液桶导入土壤中,将养料通过喷头注射入土壤中,输液到一定量,土壤的湿度达到一定值,停止注射,履带每经过一农作物(此间距通过控制履带或行走轮的行走间歇控制),重复以上过程,在行进过程中搅拌机在储液桶里搅拌养料,防止养料沉淀,并且光伏发电膜进行光电效应给蓄电池一定量的充电,以保证灌溉机器人正常工作。
46.以上公开的仅为本实用新型的几个具体实施例,但是,本实用新型实施例并非局限于此,任何本领域的技术人员能思之的变化都应落入本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1