一种自动套袋机械手的制作方法
1.本实用新型涉及食用菌机械领域,尤其涉及一种自动套袋机械手,主要适用于简化结构、提高套袋准确度。
背景技术:
2.随着食用菌栽培技术的不断创新,袋料栽培逐渐成为栽培食用菌行之有效的重要途径,利用各种农林业副产物为主要原料,添加适量的辅助材料,将其装入袋中支撑培养基,来代替传统的原木、段木等栽培材料。在袋料食用菌栽培过程中,将木屑等培养基装袋是一项重要且繁琐的生产过程。目前多采用的是人工方式,不仅工作效率低且工作强度大,需要大量的人工和场地;也有采用机械与人工结合的方式进行装袋,比如卧式食用菌培养料装袋机,进料时,通过人工将菌袋套装在出料筒上,不仅工作效率低而且准确度低;也有采用全自动的方式进行装袋,通过机械手来配合完成装袋工作,但是现有机械手结构复杂,且套袋准确度较低。
技术实现要素:
3.本实用新型的目的是克服现有技术中存在的结构复杂、套袋准确度低的缺陷与问题,提供一种结构简单、套袋准确度高的自动套袋机械手。
4.为实现以上目的,本实用新型的技术解决方案是:一种自动套袋机械手,包括固定板、气缸和两个套爪,两个所述套爪对称设置,两个套爪分别转动安装在两块移动板上,所述移动板安装在滑块上,滑块安装在滑轨上,滑轨安装在固定板上,所述移动板上位于套爪内侧的部位设置有一号限位柱,移动板上位于套爪外侧的部位设置有二号限位柱,移动板与套爪之间连接有弹簧,所述气缸的两端分别与两块移动板相连接。
5.所述套爪包括弧形板与安装板,所述安装板包括安装部与连接部,所述安装部与移动板转动连接,安装部与移动板之间连接有弹簧,所述连接部为弧形结构,连接部与弧形板垂直连接。
6.所述弧形板远离连接部的一端开设有v型缺口。
7.所述安装板上位于安装部与连接部连接处的部位内侧设置有与一号限位柱相配合的一号限位槽,安装板上位于安装部与连接部连接处的部位外侧设置有与二号限位柱相配合的二号限位槽。
8.所述移动板上设置有安装柱,所述安装部通过轴承套装在安装柱上。
9.所述安装部为三角形结构。
10.所述移动板上位于套爪外侧的部位安装有传感器。
11.所述滑轨的中部安装有限位块,两个所述套爪相对于限位块对称设置。
12.所述固定板安装在底板上,所述底板的两端连接有挡板,所述固定板位于两块挡板之间。
13.所述挡板上安装有三号限位柱。
14.与现有技术相比,本实用新型的有益效果为:
15.1、本实用新型一种自动套袋机械手中,两个套爪对称设置,两个套爪分别转动安装在两块移动板上,移动板安装在滑块上,滑块安装在滑轨上,滑轨安装在固定板上,移动板上位于套爪内侧的部位设置有一号限位柱,移动板上位于套爪外侧的部位设置有二号限位柱,移动板与套爪之间连接有弹簧,气缸的两端分别与两块移动板相连接;使用时,先控制气缸带动两块移动板相向运动,以使两个套爪合拢,再控制机械手将合拢后的两个套爪套装在菌袋内,然后控制气缸带动两块移动板反向运动,以使两个套爪分开,分开后的两个套爪将菌袋袋口撑开,以使菌袋套装在套爪上,再控制机械手将撑开后的菌袋套装在出料筒上,当菌袋套装到位后,控制机械手离开出料筒进行下一次套袋,上述结构的套袋机械手,不仅结构简单、自动化程度高,而且套袋准确度高。因此,本实用新型结构简单、自动化程度高、套袋准确度高。
16.2、本实用新型一种自动套袋机械手中,套爪包括弧形板与安装板,安装板包括三角形安装部与弧形连接部,安装部与移动板转动连接,连接部与弧形板垂直连接,上述结构的套爪,不仅能保证两个套爪准确合拢取袋,而且能保证各部件间无干涉;安装板内侧设置有与一号限位柱相配合的一号限位槽,安装板外侧设置有与二号限位柱相配合的二号限位槽,使得对套爪的限位更加可靠;弧形板远离连接部的一端开设有v型缺口,套爪上增设v型缺口,减少机械手取袋时套爪与菌袋的接触面积,进一步提高取袋的准确度;移动板上设置有安装柱,安装部通过轴承套装在安装柱上,使得套爪的安装与拆卸简便。因此,本实用新型取袋准确度高、可靠性高、安装与拆卸简便。
17.3、本实用新型一种自动套袋机械手中,移动板上位于套爪外侧的部位安装有传感器,当传感器检测到套爪运动到位后,即菌袋套装到位,控制机械手离开出料筒进行下一次套袋;滑轨的中部安装有限位块,两个套爪相对于限位块对称设置,使得两个套爪合拢时准确对中,从而提高套袋准确度。本实用新型自动化程度高、可靠性高、准确度高。
18.4、本实用新型一种自动套袋机械手中,固定板安装在底板上,底板的两端连接有挡板,固定板位于两块挡板之间,挡板上安装有三号限位柱,上述设计通过挡板来限制移动板的位移与移动板的行程,从而准确可靠控制套爪的移动,提高机械手的可靠性和准确度。因此,本实用新型可靠性高、准确度高。
附图说明
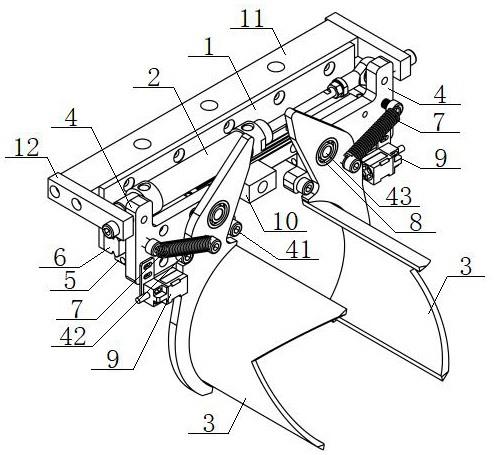
19.图1是本实用新型的结构示意图。
20.图2是图1中套爪的结构示意图。
21.图3是本实用新型中两个套爪合拢状态示意图。
22.图4是本实用新型中机械手套袋状态示意图。
23.图中:固定板1、气缸2、套爪3、弧形板31、v型缺口311、安装板32、安装部321、连接部322、一号限位槽323、二号限位槽324、移动板4、一号限位柱41、二号限位柱42、安装柱43、滑块5、滑轨6、弹簧7、轴承8、传感器9、限位块10、底板11、挡板12、三号限位柱13、菌袋14。
具体实施方式
24.以下结合附图说明和具体实施方式对本实用新型作进一步详细的说明。
25.参见图1至图4,一种自动套袋机械手,包括固定板1、气缸2和两个套爪3,两个所述套爪3对称设置,两个套爪3分别转动安装在两块移动板4上,所述移动板4安装在滑块5上,滑块5安装在滑轨6上,滑轨6安装在固定板1上,所述移动板4上位于套爪3内侧的部位设置有一号限位柱41,移动板4上位于套爪3外侧的部位设置有二号限位柱42,移动板4与套爪3之间连接有弹簧7,所述气缸2的两端分别与两块移动板4相连接。
26.所述套爪3包括弧形板31与安装板32,所述安装板32包括安装部321与连接部322,所述安装部321与移动板4转动连接,安装部321与移动板4之间连接有弹簧7,所述连接部322为弧形结构,连接部322与弧形板31垂直连接。
27.所述弧形板31远离连接部322的一端开设有v型缺口311。
28.所述安装板32上位于安装部321与连接部322连接处的部位内侧设置有与一号限位柱41相配合的一号限位槽323,安装板32上位于安装部321与连接部322连接处的部位外侧设置有与二号限位柱42相配合的二号限位槽324。
29.所述移动板4上设置有安装柱43,所述安装部321通过轴承8套装在安装柱43上。
30.所述安装部321为三角形结构。
31.所述移动板4上位于套爪3外侧的部位安装有传感器9。
32.所述滑轨6的中部安装有限位块10,两个所述套爪3相对于限位块10对称设置。
33.所述固定板1安装在底板11上,所述底板11的两端连接有挡板12,所述固定板1位于两块挡板12之间。
34.所述挡板12上安装有三号限位柱13。
35.本实用新型的原理说明如下:
36.机械手套取菌袋时,先控制气缸带动两块移动板相向运动,以使两个套爪合拢,此时,两个套爪的安装部的顶端相贴合,两个套爪连接部的顶端、底端均相贴合,两个套爪的弧形板的两侧面相贴合,二号限位柱的外壁与二号限位槽的内壁相贴合,再控制机械手将合拢后的两个套爪套装在菌袋内,然后控制气缸带动两块移动板反向运动,以使两个套爪分开,分开后的两个套爪将菌袋袋口撑开,以使菌袋套装在套爪上,同时,在菌袋的作用下,两个套爪均逆时针转动,当一号限位柱的外壁与一号限位槽的内壁相贴合时停止转动,再控制机械手水平运动将撑开后的菌袋套装在出料筒上,当菌袋套装到位后,两个套爪脱离菌袋的束缚,在弹簧的作用下,两个套爪均顺时针转动,当二号限位柱的外壁与二号限位槽的内壁相贴合时停止转动,此时,传感器检测到套爪运动到位后,控制机械手离开出料筒进行下一次套袋。
37.套袋机械手通过底板安装在升降装置和水平移动装置上,通过升降装置控制套袋机械手上下运动,通过水平移动装置控制套袋机械手水平运动,以使套袋机械手完成取袋、套袋工序。
38.实施例1:
39.参见图1至图4,一种自动套袋机械手,包括固定板1、气缸2和两个套爪3,两个所述套爪3对称设置,两个套爪3分别转动安装在两块移动板4上,所述移动板4安装在滑块5上,滑块5安装在滑轨6上,滑轨6安装在固定板1上,所述移动板4上位于套爪3内侧的部位设置有一号限位柱41,移动板4上位于套爪3外侧的部位设置有二号限位柱42,移动板4与套爪3之间连接有弹簧7,所述气缸2的两端分别与两块移动板4相连接。
40.实施例2:
41.基本内容同实施例1,不同之处在于:
42.所述套爪3包括弧形板31与安装板32,所述安装板32包括安装部321与连接部322,所述安装部321与移动板4转动连接,安装部321与移动板4之间连接有弹簧7,所述连接部322为弧形结构,连接部322与弧形板31垂直连接;所述弧形板31远离连接部322的一端开设有v型缺口311;所述安装板32上位于安装部321与连接部322连接处的部位内侧设置有与一号限位柱41相配合的一号限位槽323,安装板32上位于安装部321与连接部322连接处的部位外侧设置有与二号限位柱42相配合的二号限位槽324;所述移动板4上设置有安装柱43,所述安装部321通过轴承8套装在安装柱43上;所述安装部321为三角形结构。
43.实施例3:
44.基本内容同实施例1,不同之处在于:
45.所述移动板4上位于套爪3外侧的部位安装有传感器9。
46.实施例4:
47.基本内容同实施例1,不同之处在于:
48.所述滑轨6的中部安装有限位块10,两个所述套爪3相对于限位块10对称设置。
49.实施例5:
50.基本内容同实施例1,不同之处在于:
51.所述固定板1安装在底板11上,所述底板11的两端连接有挡板12,所述固定板1位于两块挡板12之间,所述挡板12上安装有三号限位柱13。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1