一种甘薯裸苗自动分苗取苗投苗装置及其控制系统
1.本实用新型属于农业种植机械技术领域,具体涉及一种甘薯裸苗自动分苗取苗投苗装置及其控制系统,能够有效实现甘薯裸苗的单株有序分离及取苗、投苗等自动连续作业。
背景技术:
2.甘薯俗称红薯、白薯、番薯、地瓜、山芋、红苕等,属于一年生草本植物,是一种喜温耐旱的高产粮食作物,具有营养高、用途广和市场前景好等优势。目前国内甘薯移栽以人工裸苗栽插为主,现有的半自动化甘薯移栽机结构复杂、田间作业次数多,甘薯种植劳动强度大、生产效率低。因此,亟需一种可靠性好、作业效率高的全自动甘薯移栽机,以满足甘薯种植的时效性要求,降低人工作业成本,进一步提高甘薯种植的规模与效益。
3.申请号为201710141354.1的发明专利公开了一种智能型甘薯裸苗移栽机,该发明包括送苗装置、插秧装置和夹苗装置等,不含有分苗装置,需要人工分苗、取苗,提高了作业成本。
4.申请号为201910613316.0的发明专利公开了一种马铃薯脱毒苗自动分插苗机,该发明需要剪去马铃薯苗的部分根须,且通过斜坡分苗后的秧苗下落位置不固定,无法保证装有摄像头的机械手抓取裸苗时间间隔一致。
5.甘薯裸苗柔软、易缠绕的特性,是造成甘薯全自动移栽难的重要原因。现有的全自动移栽装备大都针对钵苗或穴盘苗,尚不能完全解决取苗分苗过程中伤苗的问题,裸苗全自动移栽技术还不成熟,适用于甘薯裸苗的自动分苗取苗投苗装置仍不多见。本实用新型利用苗箱结构约束薯苗,采用振动激励方法,通过机械手扰动夹取,自动连续完成甘薯裸苗的分苗、取苗与投苗作业。
技术实现要素:
6.本实用新型的目的针对甘薯移栽时人工分苗慢与移栽效率低等问题,提供一种与薯苗个体性状及群体特征高度契合的甘薯裸苗自动分苗取苗投苗装置及其控制系统。
7.为了达到上述目的,本实用新型采用的技术方案是:
8.一种甘薯裸苗自动分苗取苗投苗装置,由苗箱、机械手、振动器和机架组成;
9.所述苗箱主要由后板、侧支撑板、不对称前板、尼龙毛挡和皱褶状弹性隔板组成,自上而下苗箱容量逐渐变小,减少了叶板粘连与薯苗纠缠,保证薯苗有序下落;后板下部装有皱褶状弹性隔板,振动器安装在皱褶状弹性隔板的下底面,通过振动激励苗箱,使薯苗产生运动碰撞并在滑落过程中渐次分离;另外,两块尼龙毛挡通过螺栓安装在不对称前板下方的开口两边,防止薯苗从苗箱滑落;
10.所述机械手设有电机架,在电机架的一侧依次安装有联轴器、电机箱、投苗电机和双轴气缸,所述投苗电机通过螺栓固定在电机箱内,并通过联轴器连接电机架,所述双轴气缸通过螺栓固定在机架上,并固定连接电机箱,在电机架的另一侧安装有定苗夹,所述定苗
夹靠近电机架的一端设有通孔,与动苗夹转动连接,组成苗夹;在电机架上设有取苗电机的安装螺孔,取苗电机通过平键连接主动杆,并为其转动提供动力,连杆的两端分别与主动杆和动苗夹转动连接。
11.进一步的,所述不对称前板底部居中开槽,槽两边板宽不对称,一边板宽,一边板窄,薯苗基部放置在板宽的一边,薯苗尾部放置在板窄的一边,减轻叶板粘连,提高薯苗喂入流畅性。
12.进一步的,所述皱褶状弹性隔板与不对称前板下部形成狭窄通道逐渐挤压薯苗苗群从而形成单排薯苗,有效控制了薯苗喂入速度,减轻了薯苗下落过程中的拥堵,促进薯苗在运动过程中分离;
13.所述皱褶状弹性隔板下部居中开槽,便于机械取苗。
14.进一步的,所述机械手通过取苗电机、投苗电机和双轴气缸的相互配合,完成取苗与投苗工作,并辅助苗箱完成分苗工作。
15.进一步的,所述取苗电机控制动苗夹逐渐转动闭合,在此过程中进一步扰动分离薯苗并完成夹取。
16.进一步的,所述定苗夹的底部焊接有一钢片,取苗时定苗夹的钢片挤压皱褶状弹性隔板,使皱褶状弹性隔板与尼龙毛档之间形成间隙,促使薯苗滑落至定苗夹。
17.进一步的,所述投苗电机通过联轴器连接电机架,进而控制苗夹转动,完成投苗工作。
18.所述的一种甘薯裸苗自动分苗取苗投苗装置的控制系统包括:数据采集单元、plc控制单元和执行单元;数据采集单元用于收集各个探测传感器的信号,并将所收集的信号发送给plc控制单元;plc控制单元将数据采集单元发送过来的信号进行调制处理与分析判断,得出处理方式之后,将控制信号发送给执行单元;执行单元根据plc控制单元发送过来的控制信号,做出相应的动作;
19.所述数据采集单元包括磁感应开关a、磁感应开关b与光电开关a、光电开关b,磁感应开关a、b分别检测双轴气缸伸长与收缩的位置,光电开关a、b分别检测取苗与投苗是否成功;磁感应开关a、b与光电开关a、b通过信号数据线与plc控制单元的输入引脚直接相连,把磁信号或光信号转换为电信号后发送给plc控制单元;
20.所述执行单元包括电磁控制器、振动器、驱动器a、取苗电机、驱动器b、投苗电机、电磁阀和双轴气缸;电磁控制器、驱动器a、电磁阀和驱动器b通过信号数据线分别与plc控制单元的信号输出引脚直接相连,所述电磁控制器按照控制程序控制振动器,所述驱动器a、b按照控制程序产生的脉冲信号分别驱动取苗电机和投苗电机,所述电磁阀按照控制程序控制气路通断,使双轴气缸产生相应动作。
21.本实用新型通过振动器激励苗箱,促使薯苗产生运动和碰撞,减轻薯苗之间的纠缠,使之在自身重力与苗箱结构约束下,渐次有序的排列在苗箱箱底,进一步通过机械手的扰动激励与仿生夹取,实现甘薯裸苗自动分苗、取苗与投苗工作。
附图说明
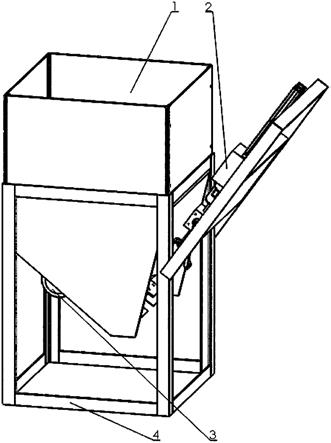
22.图1为本实用新型提供的甘薯裸苗自动分苗取苗投苗装置整体结构示意图;
23.图2为本实用新型提供的苗箱结构示意图;
24.图3为本实用新型提供的机械手结构示意图;
25.图4为本实用新型提供的机架结构示意图;
26.图5为本实用新型提供的不对称前板结构示意图;
27.图6为本实用新型提供的动苗夹结构示意图;
28.图7为本实用新型提供的定苗夹结构示意图;
29.图8为本实用新型提供的控制系统示意图;
30.图9为本实用新型提供的控制流程示意图。
31.其中:1苗箱,1-1后板,1-2侧支撑板,1-3不对称前板,1-4尼龙毛挡,1-5皱褶状弹性隔板;2机械手,2-1动苗夹,2-2定苗夹,2-3取苗电机,2-4电机架,2-5联轴器,2-6电机箱,2-7投苗电机,2-8双轴气缸,2-9主动杆,2-10连杆;3振动器;4机架。
具体实施方式
32.下面将结合本实用新型实施例中的附图1-9,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
33.本实用新型提供了一种甘薯裸苗自动分苗取苗投苗装置及其控制系统,如图1,所述的一种甘薯裸苗自动分苗取苗投苗装置由苗箱1、机械手2、振动器3和机架4组成。
34.如图2,所述苗箱1主要由后板1-1、侧支撑板1-2、不对称前板1-3、尼龙毛挡1-4和皱褶状弹性隔板1-5组成,自上而下苗箱容量逐渐变小,减少了叶板粘连与薯苗纠缠,保证薯苗有序下落;后板1-1下部装有皱褶状弹性隔板1-5,与不对称前板1-3下部形成狭窄通道逐渐挤压薯苗苗群从而形成单排薯苗,有效控制了薯苗喂入速度,减轻了薯苗下落过程中的拥堵,促进薯苗在运动过程中分离,振动器3安装在皱褶状弹性隔板1-5的下底面,通过振动激励苗箱,使薯苗产生运动碰撞并在滑落过程中渐次分离;另外,两块尼龙毛挡1-4通过螺栓安装在不对称前板1-3下方的开口两边,防止薯苗从苗箱1滑落。
35.如图3,所述机械手2设有电机架2-4,在电机架2-4的一侧依次安装有联轴器2-5、电机箱2-6、投苗电机2-7和双轴气缸2-8,所述投苗电机2-7通过螺栓固定在电机箱2-6内,并通过联轴器2-5连接电机架2-4,所述双轴气缸2-8通过螺栓固定在机架4上,并固定连接电机箱2-6,在电机架2-4的另一侧安装有定苗夹2-2,定苗夹2-2靠近电机架2-4的一端设有通孔,与动苗夹2-1转动连接,组成苗夹;在电机架2-4上设有取苗电机2-3的安装螺孔,取苗电机2-3通过平键连接主动杆2-9,并为其转动提供动力,连杆2-10的两端分别与主动杆2-9和动苗夹2-1转动连接。
36.如图4,所述机架4由角钢与钢板焊接而成,苗箱1焊接在机架4左侧,机械手2通过螺栓安装在机架4右侧。
37.在一可选的实施例中,如图5,所述不对称前板1-3底部居中开槽,槽两边板宽不对称,一边板宽,一边板窄,薯苗基部放置在板宽的一边,薯苗尾部放置在板窄的一边,减轻叶板粘连,提高薯苗喂入流畅性。
38.在一可选的实施例中,如图6,所述取苗电机2-3控制动苗夹2-1逐渐转动闭合,在此过程中进一步扰动分离薯苗并完成夹取。
39.在一可选的实施例中,如图7,所述定苗夹2-2的底部焊接有一钢片,取苗时定苗夹
2-2的钢片挤压皱褶状弹性隔板1-5,使皱褶状弹性隔板1-5与尼龙毛档1-4之间形成间隙,促使薯苗滑落至定苗夹2-2。
40.本实用新型一种甘薯裸苗自动分苗取苗投苗装置在使用时的控制系统,如图8和图9,包括数据采集单元、plc控制单元和执行单元;所述数据采集单元用于收集各个探测传感器的信号,并将所收集的信号发送给plc控制单元;所述plc控制单元将数据采集单元发送过来的信号进行调制处理与分析判断,得出处理方式之后,将控制信号发送给执行单元;所述执行单元根据plc控制单元发送过来的控制信号,做出相应的动作;
41.所述数据采集单元包括磁感应开关a、磁感应开关b与光电开关a、光电开关b,磁感应开关a、b分别检测双轴气缸2-8伸长与收缩的位置,光电开关a、b分别检测取苗与投苗是否成功;磁感应开关a、b与光电开关a、b通过信号数据线与plc控制单元的输入引脚直接相连,把磁信号或光信号转换为电信号后发送给plc控制单元;
42.所述执行单元包括电磁控制器、振动器3、驱动器a、取苗电机2-3、驱动器b、投苗电机2-7、电磁阀和双轴气缸2-8;电磁控制器、驱动器a、电磁阀和驱动器b通过信号数据线分别与plc控制单元的信号输出引脚直接相连,所述电磁控制器按照控制程序控制振动器3,所述驱动器a、b按照控制程序产生脉冲信号分别驱动取苗电机2-3和投苗电机2-7,所述电磁阀按照控制程序控制气路通断,使双轴气缸2-8产生相应动作。
43.本实用新型的工作原理是:通过振动器带动皱褶状弹性隔板振动,促使薯苗产生运动和碰撞,减轻薯苗之间的纠缠,并在自身重力与苗箱结构约束的双重作用下,使薯苗渐次有序的排列在苗箱箱底的狭窄通道中;然后由双轴气缸驱动机械手工作,使定苗夹的钢片挤压皱褶状弹性隔板,促使皱褶状弹性隔板与尼龙毛档之间形成间隙;同时,取苗电机控制动苗夹逐渐转动闭合,进一步扰动分离薯苗,使之滑落至定苗夹,完成分苗取苗;再由双轴气缸回拉机械手至初始位置,投苗电机转动,带动苗夹转动90
°
时,投苗电机停止转动,取苗电机转动使苗夹打开,完成投苗,最后投苗电机反转90
°
至初始位置。
44.以上所述,仅为本实用新型的较佳实施例,并不用以限制本实用新型,凡是依据本实用新型的技术实质对以上实施例所作的任何细微修改、等同替换和改进,均应包含在本实用新型技术方案的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1