一种园林综合养护机器人
1.本实用新型涉及园林绿化技术领域,具体为一种园林综合养护机器人。
背景技术:
2.随着我国城市化进程加快,城市绿化程度在不断提升,绿化园林对改善和美化城市环境有着重要的作用,园林绿化养护工作也受到越来越多的重视。
3.当前园林养护打理以人工操作为主,行业整体自动化智能化水平较低,人工主要缺点是工人需要重复性作业,劳动强度较高,工作模式单一,对园林进行养护的效率普遍不高。
技术实现要素:
4.本实用新型针对现有技术中存在的技术问题,提供一种园林综合养护机器人来解决上述园林综合养护机器人园林养护作业单一效率低下的问题。
5.本实用新型解决上述技术问题的技术方案如下:一种园林综合养护机器人,包括输送载具,所述输送载具上依次架设有修剪装置或喷药装置,所述输送载具的下方还安装有割草机;所述输送载具上还设置有与修剪装置或喷药装置可拆卸相连的调节机构。
6.所述修剪装置包括园艺剪刀,所述调节机构用于调节园艺剪刀的修剪方向。
7.所述喷药装置包括储液箱、喷洒杆以及泵浦机构;所述调节机构用于调节喷洒杆的喷洒方向;所述泵浦机构用于对储液箱内的药液加压并通过高压管道输送至喷洒杆内。
8.本实用新型的有益效果是:该园林综合养护机器人,可以同时安装修剪装置、喷药装置以及割草机,从而实现修剪、喷药以及割草等一系列环节的操作。采用输送载具实现机器人前进、后退、转弯以及制动等行进操作来辅助作业环节,提高作业精度。采用改机器人进行园林养护作业时,更加节省人力物力,效率也得到显著提升。
9.在上述技术方案的基础上,本实用新型还可以做如下改进。本实用新型包含以下内容:
10.进一步,所述调节机构为升降组件以及多轴机械臂装配而成。
11.进一步,所述园艺剪刀为宽式往复式刀具、窄式往复式刀具或圆盘锯齿刀具中的一种。
12.进一步,所述修剪装置还包括控制索;所述控制索包括钢丝绳、连接件以及滚子链条;所述连接件与钢丝绳相铰接;所述滚子链条的端部与连接件可拆卸相连,且围成一个用于固定绿植躯干的柔性固定口。
13.进一步,所述滚子链条和连接件上开设有相匹配的插销口,插销口内插设有插销。
14.进一步,所述喷洒杆上预留有多个等距排布的喷淋口,每个喷淋口均安装有喷头。
15.进一步,所述割草机由电机、刀盘以及刀片装配而成,所述刀片设置于刀盘下方且与电机的输出轴相连。
16.进一步,所述刀盘上还安装有围绕刀片设置的刀盘罩。
17.进一步,所述输送载具由车体、输送轮组以及传动组件装配而成。
附图说明
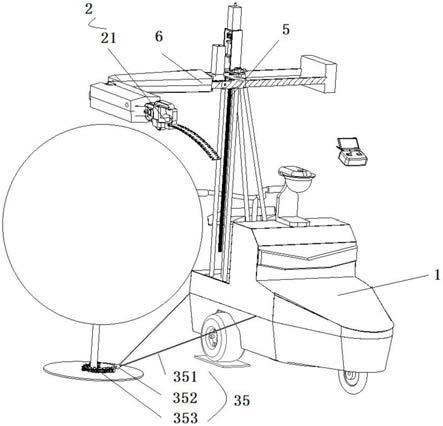
18.图1为本实用新型实施例一安装修剪装置的整体结构示意图;
19.图2为本实用新型实施例滚子链条固定树干的示意图;
20.图3为本实用新型实施例取出滚子链条的示意图;
21.图4为本实用新型实施例二安装喷药装置的整体结构示意图;
22.图5为本实用新型实施例二安装割草机的整体结构示意图;
23.图6为本实用新型割草机的局部结构剖视图。
24.附图中,各标号所代表的部件列表如下:
25.1、输送载具,2、修剪装置,21、园艺剪刀,3、喷药装置,31、储液箱,32、喷洒杆,321、喷头,33、泵浦机构,35、控制索,351、钢丝绳,352、连接件,353、滚子链条,4、割草机,41、电机,42、刀盘,43、刀片,44、刀盘罩,5、升降组件,6、多轴机械臂。
具体实施方式
26.以下结合附图对本实用新型的原理和特征进行描述,所举实例只用于解释本实用新型,并非用于限定本实用新型的范围。
27.需要说明的是,除非另有明确规定和限定,术语中“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,还可以是一体成型结构。对于本领域的普通技术人员,可以根据具体情况理解该类术语在本专利中的具体含义。
28.本实用新型实施例如下
29.实施例一
30.如图1所示,本实用设计的园林综合养护机器人,包括输送载具1,输送载具1上设置有调节机构;输送载具1上架设有与调节机构可拆卸连接的修剪装置2,用于园艺修剪工作。
31.具体的,修剪装置2包括园艺剪刀21,调节机构用于调节园艺剪刀21的修剪方向。采用调节机构调节园艺剪刀21的角度,从而根据需求将植物修剪出不同造型。
32.优选的,调节机构为升降组件5以及多轴机械臂6。升降组件5可采用直线导轨,多轴机械臂6可以采用前臂、中臂以及后臂装配而成,前臂与园艺剪刀21相连,后臂与直线导轨的滑台相连。其中,前臂和园艺剪刀21的连接处采用末端旋转关节,且连接处设置有用于安装有园艺剪刀21的卡位。通过直线导轨控制园艺剪刀21的高度,通过多轴机械臂6控制园艺剪刀21的修剪角度以对绿植进行精准修剪。
33.需要说明的是,输送载具1由车体、输送轮组以及传动组件装配而成,其目的带动整个园林综合养护机器人精准移动。输送轮组包括位于车体前侧的一个万向轮以及位于车体后侧的两个定向轮,传动组件包括无刷直流电机、减速机构以及驱动轮。
34.在修剪过程中,园艺剪刀21为宽式往复式刀具、窄式往复式刀具或圆盘锯齿刀具中的一种,长度均可选用六百五十毫米的刀具,以根据修剪对象配备不同的修剪工具,以达到最佳修剪效果。对于花园或高速隔离带,可以采用宽式往复式刀具;对于圆形、三角形、锥形需求的绿植,可采用宽窄式往复刀具。对于行道树高枝修剪,采用圆盘锯齿刀具。刀具剪
刀形状可分为直面或曲面两种,曲面剪刀具有一定的韧性,可以根据需求弯曲一定角度。
35.如图1、图2和图3所示,为了对直径较大的树冠进行修剪,本实施例中修剪装置2还包括控制索35;控制索35包括钢丝绳351、连接件352以及滚子链条353;连接件352与钢丝绳351相铰接;滚子链条353的端部与连接件352可拆卸相连,且围成一个用于固定绿植躯干的柔性固定口。滚子链条353的长度可根据树干粗细相应进行调整,采用钢丝绳351保证树干与小车的距离,保证修剪过程的精准性。钢丝绳351长度可以调整,以适应不同半径大小的树冠需要。
36.其中,滚子链条353采用可拆卸设计,方便快速完成对树干的装取。滚子链条353和连接件352上开设有相匹配的插销口,插销口内插设有插销,通过固定插销来锁紧绿植。
37.为了具体说明对不同绿植的修剪作业,工作过程如下:
38.本实用设计的园林综合养护机器人可以用于半径范围在0.4m~1.8m的圆球形树冠修剪。
39.对于半径小于0.8m的矮小圆球绿植,升降组件4将园艺剪刀21调整至指定高度后,控制多轴机械臂5前臂旋转关节的中心线对准树冠垂直中心线,多轴机械臂5中臂绕绿植躯干自动旋转,经过若干次对园艺剪刀21升降旋转调整,修剪出完整的球形。
40.对于半径大于0.8m的大型圆球树冠,可以通过滚子链条353对绿植躯干进行固定,通过多轴机械臂5和升降组件4将园艺剪刀21调整至预定位置,输送载具1在钢丝绳351和滚子链条353的限制下绕躯干行走,以将树冠修剪出弧形,通过多次调整园艺剪刀21的位置,修剪出完整的球形。
41.对于圆柱形绿植,本实用新型提出的园林综合养护机器人,可以支持在2.5m以内的圆柱体绿植修剪,采用直面形刀具,将园艺剪刀21沿绿植一侧竖直布置,输送载具1在钢丝绳351和滚子链条353的限制下绕躯干行走,以将树冠修剪为圆柱形。通过多次调整园艺剪刀21的位置,修剪出完整的圆柱形。
42.另外,本实用新型所提出的园林综合养护机器人不仅仅适用上述绿植形状的修剪,可以根据实际需求调整园艺剪刀21的位置以修剪出对应的绿植。
43.实施例二
44.如图4所示,本实施例与上述实施例的区别之处在于,输送载具1上还架设有喷药装置3,通过装载喷药装置3对绿植喷洒药液。
45.具体的,喷药装置3包括储液箱31、喷洒杆32以及泵浦机构33;喷洒杆32长1.5米;需要进行喷药时可将修剪装置2取出,将喷洒杆32安装至末端旋转关节的卡位上固定,调节机构与喷洒杆32相连,用于调节喷洒杆32的喷洒方向。泵浦机构33用于对储液箱31内的药液加压并通过高压管道输送至喷洒杆32内。泵浦机构33核心采用增压气泵,能够提供持续定额的压力,以对药液进行加压。
46.另外,喷洒杆32上预留有多个等距排布的喷淋口,每个喷淋口均安装有喷头321。本实施例中喷淋口预留有8个。
47.需要补充的是,在普通喷药过程中,喷头采用组合式铜喷头即可,对于小压力、小流量以及高扩散需求的作业场景采用离心喷头进行喷药作业。
48.在对绿植进行喷药时,具体可分为无差别喷洒和精准喷洒两种。无差别喷洒用机械臂做任意角度无死角喷洒。精准喷洒可通过输送运载具1的运行与机械臂的配合以对相
应的区域进行精准喷药。
49.需要说明的,本实用新型提出的园林综合养护机器人所涉及的调节机构可同时适配修剪装置2或喷药装置3,根据作业需求拆装对应的修剪装置2或喷药装置3,在此不做过多赘述。
50.实施例三
51.如图5所示,本实施例与上述实施例的区别之处在于,输送载具1的下方还安装有割草机4,以实现在输送载具1行进的过程可对相应的草坪进行修剪。
52.具体的,如图6所示,割草机4由电机41、刀盘42以及刀片43装配而成,刀片43设置于刀盘42下方且与电机41的输出轴相连,电机41的输出轴处可借助减速器来变化刀片线速度以及输出扭矩。为了对刀片43进行一定的防护,刀盘42上还安装有围绕刀片43设置的刀盘罩44。采用刀盘罩44避免割草作业时,避免刀片43在高速旋转时碰到硬物,如石块树根等。刀盘罩44一旦碰到硬块由于一定的刚性会被反向弹开,避免崩刃或折断,提升刀片43的使用寿命。刀盘罩44还用于防止硬物飞出伤人,如石块、破损刀片等。
53.另外,为了适配不同种类的草坪,在输送载具1上设置与割草机4相连的升降结构,保证刀片43可以实现升降,升降结构采用四连杆机构实现刀片43的升降,调节范围0-100mm。
54.综上所述,本实用新型所提出的园林综合养护机器人,可以同时安装修剪装置2、喷药装置3以及割草机4,从而实现修剪、喷药以及割草等一系列作业环节。采用输送载具1实现机器人前进、后退、转弯以及制动等行进操作来辅助作业环节,提高作业精度。
55.进一步,输送载具1的车体安装有电池组来保持整个园林综合养护机器人电能供应,并通过设置车体上的中控板来实现对规格控制器件的精准控制以完成相应的作业。为了实现员工远程控制,可以额外配备云端控制模块,通过4g/5g通信模块建立云端通信,以进行远程监控和数据分析。本实用新型所提出的园林综合养护机器人安装有视觉系统并通过配置蓝牙模块以及相应的遥控器,方便操作者在作业环境周边进行无线操控,减少了作业的局限性。
56.以上所述仅为本实用新型的较佳实施例,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1