一种菌包套环装置的制作方法
1.本实用新型涉及一种套环机,特别是涉及一种菌包套环装置。
背景技术:
2.在食用菌栽培的过程中,需要将食用菌菌种种植到菌包中,菌包培养是现代食用菌培养的通用方法,能够为食用菌提供生长所需的营养和环境。菌包在生产过程中需要经过很多道加工工序,例如填料后的套环工序、打孔工序、盖盖工序等,其中,套环工序的传统做法是工人在菌包的袋口处套上环,并将袋口向下翻边,这种手工套环的方式存在工作效率低、等问题。为此,现有技术出现了不少菌包自动套环机,其能够代替人工实现自动化套环和翻边,套环效率相比人工套环的方式有了很大提高,且套环质量好、套环质量稳定。然而,这种菌包自动套环机普遍存现以下问题:一般一次只能对一个或两个菌包进行套环,套环效率依然有待进一步提高,且这种菌包自动套环机不具有移包功能,无法做到边输送边套环,不适合应用在菌包输送设备上。
技术实现要素:
3.本实用新型针对现有技术存在的技术问题,提供了一种菌包套环装置,采用旋转套环的方式,实现边旋转移包边套环的功能,大大提高了工作效率。
4.本实用新型解决其技术问题所采用的技术方案是:一种菌包套环装置,包括机架、若干套环机构,还包括转动部件和动力机构,转动部件可绕其轴线转动地设置在机架上,并由动力机构驱动,转动部件上设有沿其周向分布的若干用于定位菌包的置包结构;所述若干套环机构分别沿转动部件的周向分布在转动部件上,并与所述置包结构一一对应,到达置包结构的菌包随转动部件旋转预设角度并接受对应的套环机构的套环动作。
5.进一步的,所述转动部件包括转动支架和移包盘,转动支架可绕其轴线转动地立置于所述机架,所述若干打孔机构沿转动支架的周向分布在转动支架上,移包盘与转动支架同轴设置在一起,并设有所述置包结构;所述移包盘位于所述若干套环机构下方。
6.进一步的,所述置包结构为设于所述转动部件外侧面并供菌包靠置的靠置槽,该靠置槽在所述转动部件轴向上的两端分别通出;还包括设置在所述机架上的导向板,该导向板设有位于所述移包盘外围的弧形导向面,该弧形导向面对到达靠置槽的菌包随所述移包盘旋转预设角度进行导向;所述靠置槽为弧形槽,所述导向板为弧形板。
7.进一步的,所述移包盘的数量为至少两个,该至少两个移包盘上下分布,且该至少两移包盘的各置包结构上下对应。
8.进一步的,所述套环机构包括夹环组件、夹袋组件、第一驱动组件和第二驱动组件,第一驱动组件、第二驱动组件分别设置于所述转动部件,且第一驱动组件连接夹环组件,以带动夹环组件上下移动;第二驱动组件连接夹袋组件,以带动夹袋组件上下移动。
9.进一步的,所述夹环组件包括两夹环爪和手指气缸,两夹环爪相对设置,手指气缸连接该两夹环爪,以控制两夹环爪闭合或张开;所述夹袋组件包括支撑件、缩口气缸、夹袋
气缸、若干夹袋爪和若干缩口爪,所述若干夹袋爪可收拢或张开地设置于支撑件,并由设置于所述支撑件的夹袋气缸驱动,以实现张合;所述若干缩口爪可收拢或张开地设置于支撑件,并由设置于所述支撑件的缩口气缸驱动,以实现张合;所述两夹环爪位于所述支撑件下方,所述若干夹袋爪在收拢状态能向下穿过所述两夹环爪所夹住的环;所述第一驱动组件连接手指气缸,以带动该手指气缸上下移动;所述第二驱动组件连接支撑件,以带动支撑件上下移动。
10.进一步的,所述套环机构还包括若干第一机械阀,该若干第一机械阀设置于所述转动支架,并与所述手指气缸、夹袋气缸、缩口气缸一一配合,以分别控制手指气缸、夹袋气缸、缩口气缸通断气;所述机架设置位于所述转动支架外围并与所述若干第一机械阀一一对应的若干第一弧形触发板,在菌包随移包盘旋转预设角度的过程中,各第一机械阀分别接触对应的第一弧形触发板而被触发。
11.进一步的,所述第一驱动组件包括升降气缸,该升降气缸的活塞杆连接所述手指气缸;所述第一驱动组件还包括用于控制升降气缸通断气的第二机械阀,该第二机械阀设置于所述转动支架,所述机架设置位于所述转动支架外围的第二弧形触发板,在菌包随移包盘旋转预设角度的过程中,第二机械阀接触第二弧形触发板而被触发;所述第二驱动组件包括减速电机和链条传动组件,减速电机通过链条传动组件连接所述支撑件。
12.进一步的,所述支撑件具有上下分布的上支撑板和下支撑板,所述若干夹袋爪和若干缩口爪分别转动连接于下支撑板;所述缩口气缸设置在上支撑板上,且其活塞杆穿过上支撑板,并连接一位于上支撑板和下支撑板之间的第一活动件,该第一活动件通过若干连杆与所述若干缩口爪一一活动连接;所述夹袋气缸设置在所述下支撑板上,且其活塞杆穿过下支撑板,并连接一第二活动件,所述若干夹袋爪顶部面向第二活动件的一侧分别设有卡槽,各卡槽分别卡住第二活动件。
13.进一步的,所述动力机构包括设置于所述机架的减速机,该减速机由电机驱动,所述减速机的输出轴与所述转动部件传动连接;所述机架包括工作台和支撑架,工作台设置在支撑架底部,所述转动部件上端转动连接于支撑架顶部,所述转动部件下端转动连接于工作台,所述动力机构设置于支撑架和/或工作台。
14.相较于现有技术,本实用新型具有以下有益效果:
15.1、由于本实用新型还包括所述转动部件和动力机构,转动部件由该动力机构驱动旋转,所述若干套环机构分别沿转动部件的周向间隔设置于该转动部件,到达置包结构的菌包随转动部件旋转预设角度并接受对应的套环机构的套环动作,使得本实用新型能够实现边旋转移包边套环的功能,适用于应用在菌包输送设备上,且能够实现多工位套环,大大提高了套环效率。
16.2、所述置包结构为靠置槽,本实用新型还包括设置在所述机架上的导向板,该导向板的弧形导向面对到达靠置槽的菌包随所述转动部件旋转预设角度进行导向,使得本实用新型适于与菌包输送线或转移器配合,实现菌包的导入和导出。。
17.3、所述第一机械阀/第二机械阀的设置,与所述第一弧形触发板/第二弧形触发板配合,使得在菌包随移包盘旋转预设角度的过程中,夹环组件、夹袋组件能够自动启动,对菌包进行套环操作。
18.以下结合附图及实施例对本实用新型作进一步详细说明;但本实用新型的一种菌
包套环装置不局限于实施例。
附图说明
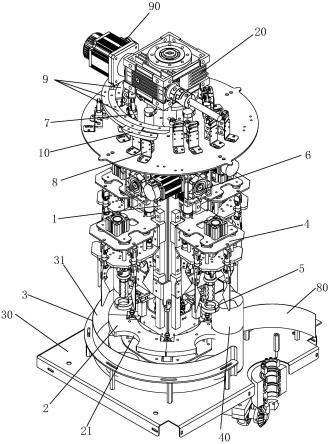
19.图1是本实用新型的立体构造示意图一(含转移器局部);
20.图2是本实用新型的立体构造示意图二(含菌包输送线、环输送线);
21.图3是本实用新型的夹环组件的立体构造示意图。
22.图4是本实用新型的夹袋组件的立体构造示意图一;
23.图5是本实用新型的夹袋组件的立体构造示意图二(局部未体现);
24.其中,1、转动支架,2、移包盘,21、靠置槽,3、导向板,31、弧形导向面,转移4、夹袋组件,41、支撑件,411、上支撑板,412、下支撑板,413、侧板,42、夹袋爪,421、卡槽,43、缩口爪,44、缩口气缸,45、第一活动件,46、连杆,47、夹袋气缸,48、第二活动件,5、夹环组件,51、手指气缸,52、夹环爪,6、减速电机,7、第一机械阀,8、第二机械阀,9、第一弧形触发板,10、第二弧形触发板,20、蜗轮蜗杆减速机,30、工作台, 40、菌包,50、菌包输送线,60、环输送线,70、环,80、转移器,90、电机。
具体实施方式
25.请参见图1-图5所示,本实用新型的一种菌包套环装置,包括机架、若干套环机构,还包括转动部件和动力机构,转动部件可绕其轴线转动地设置在机架上,并由动力机构驱动,转动部件上设有沿其周向分布的若干置包结构,该置包结构用于定位菌包;所述若干套环机构分别沿转动部件的周向间隔设置于该转动部件,并与所述若干置包结构一一对应,到达置包结构的菌包随转动部件旋转预设角度并接受对应的套环机构的套环动作。所述转动部件的轴线位于上下方向上。
26.本实施例中,所述转动部件包括转动支架1和移包盘2,转动支架1可绕其轴线转动地立置于所述机架,所述若干打孔机构5沿转动支架1的周向分布在转动支架1上,移包盘2 与转动支架1同轴设置在一起,并设有所述若干置包结构(即所述若干置包结构沿移包盘周向均匀分布在移包盘上);所述移包盘2位于所述若干套环机构下方。所述转动部件由所述转动支架1和移包盘2构成,使转动部件的结构更加简单、紧凑。
27.本实施例中,所述套环机构的数量为四个,该四个套环机构均匀分布。在其它实施例中,所述套环机构的数量为六个、八个等。由于所述置包结构与所述套环机构一一对应,因此,所述移包盘2上的置包结构的数量也为四个。
28.本实施例中,所述置包结构为设于所述移包盘22外侧面并上下贯通的靠置槽21,该靠置槽21为弧形槽,用于供菌包侧向靠入。本实用新型还包括设置在所述机架上的导向板3,该导向板3设有位于所述移包盘2外围的弧形导向面,该弧形导向面对到达靠置槽21的菌包随所述移包盘2旋转预设角度进行导向。所述导向板3具体为弧形导向板,但不局限于此。所述移包盘2的数量为至少两个,该至少两个移包盘2上下分布,且该至少两移包盘2的各靠置槽21上下对应,如此,一个菌包能够同时由至少两个上下对应的靠置槽21提供侧向支撑,避免菌包出现歪斜,甚至倾倒的现象。
29.本实施例中,所述套环机构包括夹环组件5、夹袋组件4、第一驱动组件和第二驱动组件,第一驱动组件、第二驱动组件分别设置于所述转动支架1,且第一驱动组件连接夹环
组件5,以带动夹环组件5上下移动;第二驱动组件连接夹袋组件4,以带动夹袋组件4上下移动。
30.本实施例中,如图3所示,所述夹环组件5包括两夹环爪52和手指气缸51,两夹环爪 52相对设置,手指气缸51连接该两夹环爪52,以控制两夹环爪52闭合或张开。如图4、图5所示,所述夹袋组件4包括支撑件41、缩口气缸44、夹袋气缸47、若干夹袋爪42和若干缩口爪43,所述若干夹袋爪42可收拢或张开地设置于支撑件41,并由设置于所述支撑件41的夹袋气缸47驱动,以实现张合;所述若干缩口爪43可收拢或张开地设置于支撑件 41,并由设置于所述支撑件41的缩口气缸44驱动,以实现张合;所述两夹环爪52位于所述支撑件41下方,所述若干夹袋爪42在收拢状态能向下穿过所述两夹环爪52所夹住的环 70(图1、图3、图4均体现了环70,但仅用于体现所述若干夹袋爪42在收拢状态能穿过环70)。所述支撑件41具有上下分布的上支撑板411和下支撑板412,以及连接该上支撑板 411和下支撑板412的侧板413,所述若干夹袋爪42和若干缩口爪43分别转动连接于下支撑板412;所述缩口气缸44设置在上支撑板411上,且其活塞杆穿过上支撑板411,并连接一位于上支撑板411和下支撑板412之间的第一活动件45,该第一活动件45通过若干连杆46与所述若干缩口爪43一一活动连接;所述夹袋气缸47设置在所述下支撑板412上,且其活塞杆穿过下支撑板412,并连接一第二活动件47,所述若干夹袋爪42顶部面向第二活动件47的一侧分别设有卡槽421,各卡槽421分别卡住第二活动件47。所述第一活动件45 为活动板结构,所述第二活动件47上部为轴体,下部呈圆盘状,所述若干夹袋爪42的卡槽 421即分别卡住第二活动件47下部。所述夹袋爪42、缩口爪43的数量分别为五个,但不局限于此。所述第一驱动组件连接手指气缸51,以带动该手指气缸51上下移动;所述第二驱动组件连接支撑件41,以带动支撑件41上下移动。为了确保工作的稳定性,所述支撑件41 和/或手指气缸51可以采用导向结构与转动支架1配合,以实现支撑件41/手指气缸51上下移动地稳定性。
31.本实施例中,所述套环机构还包括若干第一机械阀7,该若干第一机械阀7设置于所述转动支架1,并与所述手指气缸51、夹袋气缸47、缩口气缸44一一配合,以分别控制手指气缸51、夹袋气缸、缩口气缸44通断气;所述机架设置位于所述转动支架1外围并与所述若干第一机械阀7一一对应的若干第一弧形触发板9,在菌包随移包盘2旋转预设角度的过程中,各第一机械阀7分别接触对应的第一弧形触发板9而被触发。
32.本实施例中,所述第一驱动组件包括升降气缸(图中未体现),该升降气缸的活塞杆连接所述手指气缸51;所述第一驱动组件还包括用于控制升降气缸通断气的第二机械阀8,该第二机械阀8设置于所述转动支架1,所述机架设置位于所述转动支架1外围的第二弧形触发板10,在菌包随移包盘2旋转预设角度的过程中,第二机械阀8接触第二弧形触发板10 而被触发;所述第二驱动组件包括减速电机6和链条传动组件(图中未体现),减速电机6 通过链条传动组件连接所述支撑件41。
33.本实施例中,所述动力机构包括蜗轮蜗杆减速机20,并设置于所述机架,所述蜗轮蜗杆减速机20由电机90驱动,且输出轴与所述转动支架1传动连接。所述机架包括工作台 30和支撑架(图中未体现),工作台30设置在支撑架底部,所述转动支架1上端转动连接于支撑架顶部,所述转动支架1下端转动连接于工作台30,所述动力机构(即蜗轮蜗杆减速机20和电机90)设置于支撑架顶部,但不局限于此,在其它实施例中,所述动力机构设置于工作台。所述导向板3设置在工作台30上,所述第一弧形触发板9、第二弧形触发板10分别设置在
支撑架顶部。所述第一弧形触发板9/第二弧形触发板10周向的两端底部分别设有导向斜面,以方便相应的第一接触阀/第二接触阀进出第一弧形触发板9/第二弧形触发板10底面所在的范围。
34.本实用新型的一种菌包套环装置,与菌包输送线50、菌包转移器80、环输送线60配合使用,菌包输送线50位于所述导向板3的一端处,转移器80位于所述导向板3的另一端处,并设置在所述工作台30上。所述转移器包括周向分布有若干转包槽的转移盘和位于该转移盘外围的弧形导包板。
35.本实用新型的工作过程如下:蜗轮蜗杆减速机20驱动所述转动支架1绕其轴线转动,随着转动支架1转动,其上的各套环机构及移包盘2跟着转动;当菌包40由菌包输送线50 送至靠近导向板3一端的靠置槽21时,菌包随移包盘2一起转动(菌包底端由机架的工作台30托住),以此同时,环输送线60将环输送到位于菌包上方的夹环组件5,并由该夹环组件5夹住和随转动支架1转动;在菌包随移包盘2一起转动的过程中,该菌包上方的夹袋组件4由减速电机6驱动向下移动,使该夹袋组件4呈收拢状态的所述若干夹袋爪42向下穿过环并进入菌包的袋口内,此时,所述若干缩口爪43呈张开状态,并位于菌包的袋口外侧;尔后,夹袋气缸47启动,驱使所述若干夹袋爪42张开;接着,缩口气缸44启动,带动所述若干缩口爪43收拢,将菌包的袋口往所述若干夹袋爪42内侧拨后马上复位,同时,所述若干夹袋爪42由夹袋气缸47驱动实现收拢,将菌包的袋口抓住;随后,升降气缸启动,带动夹环组件5下移,实现套环动作,尔后,手指气缸51启动,驱使两夹环爪52张开,紧接着,夹袋气缸47控制所述若干夹袋爪42张开,整个夹袋组件4由减速电机6带动下移,使缩口爪43下压,实现袋口翻边动作,随后,整个夹袋组件4复位并回到最高位置,夹环组件5也复位并回到最高位置。当完成套环和袋口翻边的菌包随移包盘2转动到靠近导出口时,该菌包即被菌包输送线或菌包转移器接走,以便于后续进一步加工。随着转动支架1 不断旋转,其上的各个套环机构陆续对到达对应靠置槽21处的菌包进行套环及袋口翻边动作。整个过程中,转动支架1由顶部的蜗轮蜗杆减速机20带动匀速旋转,转动支架1每转一圈,四个套环机构分别完成一次套环及袋口翻边动作,因此,本实用新型能实现多工位同时工作,提高效率及稳定性。
36.上述各气缸(夹袋气缸47、缩口气缸44、手指气缸51、升降气缸)分别由对应的弧形触发板(第一弧形触发板9、第二弧形触发板10)控制各自的机械阀(第一机械阀7、第二机械阀8),实现气缸的通断气,具体,当机械阀接触对应的弧形触发板时,机械阀即被触发,并控制相应的气缸通气,使其活塞杆伸出,当机械阀离开弧形触发板时,机械阀自动复位,并控制相应的气缸断气,使其活塞杆缩回,因此,通过控制弧形触发板的位置、长度,可以控制机械阀被触发的时间点、时长,从而控制气缸的活塞杆伸出的时间点、时长。
37.本实用新型的一种菌包套环装置,能够实现边旋转移包边套环的功能,适用于应用在菌包输送设备上,且能够实现多工位套环,大大提高了套环效率。
38.上述实施例仅用来进一步说明本实用新型的一种菌包套环装置,但本实用新型并不局限于实施例,凡是依据本实用新型的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均落入本实用新型技术方案的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1