一种手动摩擦控制力度的果实采摘机
1.本实用新型涉及果实采摘技术领域,尤其涉及一种手动摩擦控制力度的果实采摘机。
背景技术:
2.现有研发的手动苹果采摘机,其抓握结构产生的夹持力度的大小无法做到精准控制,当果实的大小发生变化时,其夹持力度也随着变化,容易对采摘的果实产生损伤,无法满足现有的果实采摘需求。
技术实现要素:
3.针对上述现有技术的不足,本实用新型提供一种手动摩擦控制力度的果实采摘机。
4.为解决上述技术问题,本实用新型所采取的技术方案是:一种手动摩擦控制力度的果实采摘机,包括机架合件、传动杆、动力传动系统、力的调整机构、抓握结构;
5.所述机架合件由中空长管和刚性支撑板固定连接而成;
6.所述动力传动系统:包括手轮、轴承座、输入轴、轴承、摩擦轮、摩擦传动片;
7.所述输入轴的一端与手轮连接,另一端与摩擦轮连接;
8.所述摩擦轮的边缘伸入到机架合件的开口中,与摩擦传动片压力接触;
9.所述轴承固定在轴承座上,轴承座固定在刚性支撑板上;
10.所述传动杆与摩擦传动片在中空长管内轴向固定连接;
11.所述力的调整机构:包括固定座、支撑螺钉、活动支撑杆;
12.所述固定座固定在中空长管上,在固定座中间设置活动支撑杆,所述固定座限制活动支撑杆在中空长管中的轴向自由度;
13.所述支撑螺钉与机架合件螺纹连接,控制活动支撑杆在中空长管中的径向位置。
14.进一步的,采摘机还包括自锁机构,所述自锁机构包括拨动手柄、拨动轴、轴套、凸轮、刹车垫片;
15.所述轴套固定在轴承座上,与拨动轴为间隙配合连接,拨动轴的另一端与凸轮连接;
16.所述拨动手柄质量不均布,固定在拨动轴上,在重力作用下产生一个使凸轮与摩擦传动片相接触的力矩;
17.所述刹车垫片固定在固定座上,与凸轮的位置对齐。
18.进一步的,所述自锁机构还包括用于固定拨动手柄的卡箍柱,所述卡箍柱固定在所述机架合件的刚性支撑板上。
19.进一步的,所述拨动手柄上圆柱的端部设置用于增加凸轮、摩擦传动片和刹车垫三者之间的压力的配重。
20.进一步的,所述抓握结构包括支杆、活动爪、三夹爪;
21.所述支杆一端与中空长管为固定角度的连接,支杆另一端与三夹爪活动连接;所述传动杆与活动爪固定连接;所述活动爪的两端各设置一个腰形孔,所述三夹爪与活动爪连接的一端设置圆形滑销,所述腰形孔限制圆形滑销的运动空间。
22.进一步的,所述三夹爪与果实的接触面安装有防护垫。
23.进一步的,在中空长管接近抓握结构侧的端口设置滑套。
24.采用上述技术方案所产生的有益效果在于:
25.1、本实用新型提供的手动摩擦控制力度的果实采摘机结构相对简单、手持式采摘使用方便,具有很好的实用性和经济性。
26.2、本实用新型利用摩擦原理,通过调节摩擦力的大小实现对所摘果实夹持力的调节,来达到果实夹持力可控的技术效果。
27.3、本实用新型利用凸轮机构的自锁功能解决手轮上没有力矩输入时所采摘果实夹持力消失的问题。且能使果实采摘机处于任何位置时,力的自锁机构都能有效。
28.4、本实用新型提供的手动摩擦控制力度的果实采摘机降低了采摘果实的损伤率,提高了果农的收入和经济效益。
附图说明
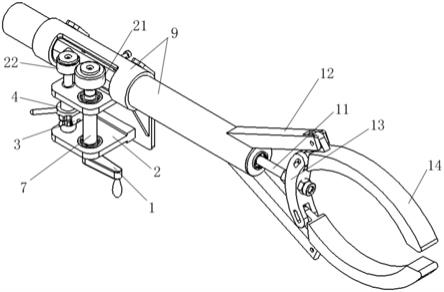
29.图1为本实用新型实施例中手动摩擦控制力度的果实采摘机的整体结构示意图;
30.图2为本实用新型实施例中手动摩擦控制力度的果实采摘机的细节展示图;
31.图3为本实用新型实施例中接近抓握结构侧的端口的滑套所在位置的示意图;
32.其中,1-手轮,2-轴承座,3-卡箍柱,4-拨动手柄,5-拨动轴,6-轴套,7-输入轴,8-轴承,9-机架合件,10-摩擦传动片,11-传动杆,12-支杆,13-活动爪,14-三夹爪,15-防护垫, 16-果实,17-滑套,18-固定座,19-支撑螺钉,20-活动支撑杆,21-摩擦轮,22-凸轮,23-刹车垫片,24-挡圈。
具体实施方式
33.下面结合附图和实施例,对本实用新型的具体实施方式作进一步详细描述。以下实施例用于说明本实用新型,但不用来限制本实用新型的范围。
34.如图1所示,本实施例中手动摩擦控制力度的果实采摘机的结构如下所述。
35.手动摩擦控制力度的果实采摘机包括机架合件(9)、传动杆(11)、动力传动系统、力的调整机构、抓握结构,各结构的细节如图2所示;
36.所述机架合件(9)由中空长管和刚性支撑板固定连接而成,为采摘果实提供坚固的平台;
37.所述动力传动系统:包括手轮(1)、轴承座(2)、输入轴(7)、轴承(8)、摩擦轮(21)、摩擦传动片(10);
38.所述输入轴(7)的一端与手轮(1)连接,另一端与摩擦轮(21)连接;
39.所述摩擦轮(21)的边缘伸入到机架合件(9)的开口中,与摩擦传动片(10)压力接触;
40.所述轴承(8)固定在轴承座(2)上,轴承座(2)固定在刚性支撑板上,给动力传动系统提供支撑;
41.所述传动杆(11)与摩擦传动片(10)在中空长管内轴向固定连接;径向可自由调整,保证摩擦传动片(10)与摩擦轮(21)充分接触;
42.所述力的调整机构:包括固定座(18)、支撑螺钉(19)、活动支撑杆(20);
43.所述固定座(18)固定在中空长管上,在固定座(18)中间设置活动支撑杆(20),所述固定座(18)限制活动支撑杆(20)在中空长管中的轴向自由度,容许其径向移动;
44.所述支撑螺钉(19)与机架合件(9)螺纹连接,控制活动支撑杆(20)在中空长管中的径向位置。
45.本实施例中,通过旋转支撑螺钉(19),在螺纹作用下推动活动支撑杆(20)在中空长管中径向移动,来调节摩擦轮(21)与摩擦传动片(10)之间的接触压力,从而将外力转化为作用在摩擦传动片(10)上的正压力;当摩擦轮(21)在手轮(1)的力矩作用下发生正、反转动时,在摩擦力的作用下,带动摩擦传动片(10)在中空长管中轴向来回的直线移动,从而实现抓握结构对果实的抓取与松开。
46.进一步的,采摘机还包括自锁机构,所述自锁机构包括拨动手柄(4)、拨动轴(5)、轴套(6)、凸轮(22)、刹车垫片(23);
47.所述轴套(6)固定在轴承座(2)上,与拨动轴(5)为间隙配合连接,为拨动轴(5) 的一端提供支撑。拨动轴(5)的另一端与凸轮(22)连接;
48.所述拨动手柄(4)质量不均布,固定在拨动轴(5)上,在重力作用下产生一个使凸轮 (22)与摩擦传动片(10)相接触的力矩;
49.所述刹车垫片(23)固定在固定座(18)上,与凸轮(22)的位置对齐。
50.本实施例中,当凸轮(22)与摩擦传动片(10)接触时,在力的作用下凸轮(22)、摩擦传动片(10)和刹车垫片(23)三者之间产生一定的压力,实现自锁功能。在拨动轴(5)远离轴套(6)的一端设置挡圈(24),用于限制凸轮(22)滑出拨动轴(5)。
51.进一步的,所述自锁机构还包括用于固定拨动手柄(4)的卡箍柱(3),所述卡箍柱(3) 固定在所述机架合件(9)的刚性支撑板上。当拨动手柄(4)上圆柱卡在卡箍柱(3)中时,凸轮(22)不再与摩擦传动片(10)接触,自锁机构失效。
52.进一步的,所述拨动手柄(4)上圆柱的端部设置用于增加凸轮(22)、摩擦传动片(10) 和刹车垫片(23)三者之间的压力的配重。
53.进一步的,所述抓握结构包括支杆(12)、活动爪(13)、三夹爪(14);
54.所述支杆(12)一端与中空长管为固定角度的连接,支杆(12)另一端与三夹爪(14) 活动连接;所述传动杆(11)与活动爪(13)固定连接。所述活动爪(13)的两端各设置一个腰形孔,所述三夹爪(14)与活动爪连接的一端设置圆形滑销,所述腰形孔限制圆形滑销的运动空间;当传动杆(11)在中空长管前后往复移动,从而实现三夹爪(14)张开不同的角度。
55.进一步的,所述三夹爪(14)与果实的接触面安装有防护垫(15)。防止在抓握结构中对果实造成损伤。
56.进一步的,在中空长管接近抓握结构侧的端口设置滑套(17),如图3所示。滑套(17) 对穿出的传动杆(11)在中空长管中的径向位置进行限制,对轴向位置不做限制。
57.在本实施例中,采用上述手动摩擦控制力度的果实采摘机进行果实采摘的过程如下:
58.a.调试三夹爪之间的力:
59.先将拨动手柄(4)上的圆柱卡在卡箍柱(3)中,使自锁机构失效;再给三夹爪之间放入待采摘果实,然后转动手轮(1),在摩擦力的作用下,摩擦传动片(10)后退,使三夹爪 (14)逐渐夹紧果实直至摩擦轮打滑,检查果实是否被夹伤。如果被夹伤,则旋转支撑螺钉 (19),进而推动活动支撑杆(20)调整摩擦传动片(10)与摩擦轮(21)之间的摩擦力,确保果实不被夹伤。
60.b.打开三夹爪,准备抓取果实:
61.将拨动手柄(4)上的圆柱卡在卡箍柱(3)中,使自锁机构失效;此时转动手轮(1),在摩擦力的作用下,摩擦传动片(10)前进,使三夹爪(14)打开。
62.c.捕获果实:
63.反向转动手轮(1),在摩擦力的作用下,摩擦传动片(10)后退,使三夹爪(14)逐渐闭合,果实被捕获。拨动手柄(4)使其脱离卡箍柱(3),在重力作用下,自锁机构处于工作状态。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1