一种全自动猪舍粪道清洗车系统的制作方法
1.本实用新型涉及养殖设备技术领域,具体为一种全自动猪舍粪道清洗车系统。
背景技术:
2.随着国家经济的快速发展,人民生活水平的逐步提高,人民群众对于饮食要求也越来越高。猪肉是广大人民群众餐桌上常见的菜品,同时也是人类营养系统中不可缺失的食品。现阶段,人民群众的饮食要求更着重偏向于健康饮食,而在畜肉中,猪肉的蛋白质含量最低,脂肪含量最高,食用过多的猪肉容易带来身体过度肥胖、内脏脂肪含量过高的健康问题。因此,在这个全民养生的大环境下,对于猪类的养殖技术要求也越来越高。
3.但是现在的养殖设备在清洗猪舍时往往无法进行远距离遥控,无法进行远距离自动清洗,而且在行走时无法一直在直线行走,这会导致一直需要去调整,会使清洗效率变低,不利于清洗猪舍。
技术实现要素:
4.本实用新型的目的在于提供一种全自动猪舍粪道清洗车系统,具有路线调整、远距离自动清洗、提高清洗效率的优点,解决了现有技术中的问题。
5.为实现上述目的,本实用新型提供如下技术方案:一种全自动猪舍粪道清洗车系统,包括外壳和系统,所述外壳顶部左侧设有转速传感器,所述转速传感器右侧设有动力电机,所述动力电机右侧设有水泵,所述转速传感器、动力电机和水泵均通过螺栓固定在外壳上,所述水泵顶部中间设有阀门,所述阀门通过螺栓固定在水泵上,所述水泵前侧面左侧设有进水口,所述进水口右侧设有出水口,所述进水口和出水口均通过螺纹固定在水泵上,所述水泵右侧设有水箱盖,所述水箱盖通过轴承固定在外壳上,所述水箱盖右侧设有支撑板,所述支撑板通过螺栓固定在外壳上,所述支撑板上设有水管转轮,所述水管转轮通过支撑轴固定在支撑板上,所述水管转轮上设有高压喷头,所述高压喷头通过水管缠绕固定在水管转轮上,所述外壳前后两面底部左侧均设有电磁信号检测传感器,所述电磁信号检测传感器均通过螺栓固定在外壳上,所述外壳内部左侧设有控制器,所述控制器通过螺栓固定在外壳内部,所述控制器右侧放置有水箱,所述外壳底部中间安装有转向电机。
6.所述系统包括电源模块、电磁信号检测模块、控制器、转速感应模块、动力模块、清洗模块和转向模块,所述电源模块通过线缆连接控制器,所述控制器通过线缆分别连接电磁信号检测模块、转速感应模块、动力模块、清洗模块和转向模块。
7.所述电源模块采用电源接口进行电源的接入。
8.所述电磁信号检测模块采用电磁信号检测传感器进行清洗车的正确行走。
9.所述转速感应模块通过转速传感器对电机进行转速感应。
10.所述动力模块采用动力电机进行动力的供应。
11.所述转向模块采用转向电机进行清洗车方向的调整。
12.优选的,所述外壳底部设有车轮,所述车轮均匀分布有四个,所述车轮通过轴承固
定在外壳上,所述转向电机通过链条与车轮均对应相连接。
13.优选的,所述动力电机通过皮带与水泵相连接。
14.优选的,所述外壳右面后侧底部设有电源接口,所述电源接口通过螺栓固定在外壳上。
15.优选的,所述清洗模块通过高压喷头进行猪舍的清洗。
16.优选的,所述电源接口通过线缆连接有电源和控制器,所述控制器通过线缆分别连接转速传感器、动力电机、电磁信号检测传感器、和转向电机。
17.与现有技术相比,本实用新型的有益效果如下:
18.1.本一种全自动猪舍粪道清洗车系统采用外壳进行保护,方便保护,采用转速传感器进行转速感应,方便转速的感应,采用动力电机进行动力供应,方便动力的供应,采用水泵进行水源供应,方便水源的供应,采用阀门进行水泵控制,方便水泵的控制,采用进水口进行水源输入,方便水源的输入,采用出水口进行水源输出,方便水源的输出,采用水箱盖进行水箱的保护,方便水箱的保护,采用支撑板进行支撑,方便支撑,采用水管转轮进行水管的收纳,方便水管的收纳,采用高压喷头进行清洗,方便清洗,采用电磁信号检测传感器进行电磁信号感应,方便清洗车的行走,采用控制器进行整体控制,方便智能化控制,采用水箱进行水源的储存,方便水源的储存,采用转向电机进行方向调整,方便方向的调整。
19.2.本一种全自动猪舍粪道清洗车系统采用电源模块进行电源接入,方便电源的接入,采用电磁信号检测模块进行电磁信号感应,方便清洗车正确的行走,采用转速感应模块进行电机转速感应,方便转速的感应,采用动力模块进行动力供应,方便动力的供应,采用清洗模块进行清洗,方便清洗,采用转向模块进行方向控制,方便方向的控制。
附图说明
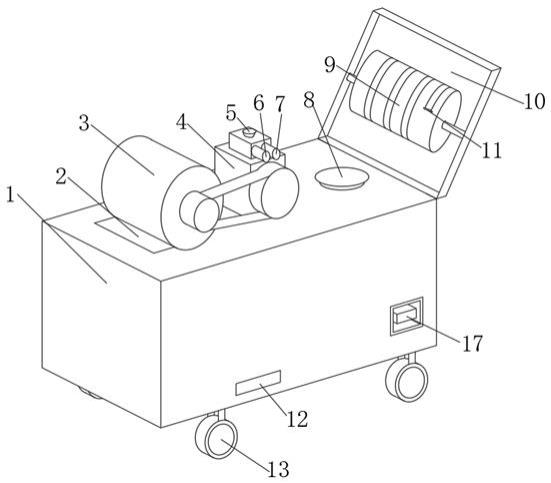
20.图1为本实用新型一种全自动猪舍粪道清洗车系统的整体结构示意图。
21.图2为本实用新型一种全自动猪舍粪道清洗车系统的内部结构示意图。
22.图3为本实用新型一种全自动猪舍粪道清洗车系统的底部结构示意图。
23.图4为本实用新型一种全自动猪舍粪道清洗车系统的系统示意图。
24.图中标注说明:1、外壳;2、转速传感器;3、动力电机;4、水泵;5、阀门;6、进水口;7、出水口;8、水箱盖;9、水管转轮;10、支撑板;11、高压喷头;12、电磁信号检测传感器;13、车轮;14、控制器;15、水箱;16、转向电机;17、电源接口。
具体实施方式
25.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例,基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
26.在本实用新型的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
27.实施例1:
28.请参阅图1、2、3,一种全自动猪舍粪道清洗车系统,包括外壳1和系统,外壳1顶部左侧设有转速传感器2,转速传感器2右侧设有动力电机3,动力电机3右侧设有水泵4,转速传感器2、动力电机3和水泵4均通过螺栓固定在外壳1上,水泵4顶部中间设有阀门5,阀门5通过螺栓固定在水泵4上,水泵4前侧面左侧设有进水口6,进水口6右侧设有出水口7,进水口6和出水口7均通过螺纹固定在水泵4上,水泵4右侧设有水箱盖8,水箱盖8通过轴承固定在外壳1上,水箱盖8右侧设有支撑板10,支撑板10通过螺栓固定在外壳1上,支撑板10上设有水管转轮9,水管转轮9通过支撑轴固定在支撑板10上,水管转轮9上设有高压喷头11,高压喷头11通过水管缠绕固定在水管转轮9上,外壳1前后两面底部左侧均设有电磁信号检测传感器12,电磁信号检测传感器12均通过螺栓固定在外壳1上,外壳1内部左侧设有控制器14,控制器14通过螺栓固定在外壳1内部,控制器14右侧放置有水箱15,外壳1底部中间安装有转向电机16,外壳1底部设有车轮13,车轮13均匀分布有四个,车轮13通过轴承固定在外壳1上,转向电机16通过链条与车轮13均对应相连接,动力电机3通过皮带与水泵4相连接,外壳1右面后侧底部设有电源接口17,电源接口17通过螺栓固定在外壳1上,电源接口17通过线缆连接有电源和控制器14,控制器14通过线缆分别连接转速传感器2、动力电机3、电磁信号检测传感器12、和转向电机16。
29.具体的,采用外壳1进行保护,方便保护,采用转速传感器2进行转速感应,方便转速的感应,采用动力电机3进行动力供应,方便动力的供应,采用水泵4进行水源供应,方便水源的供应,采用阀门5进行水泵4控制,方便水泵4的控制,采用进水口6进行水源输入,方便水源的输入,采用出水口7进行水源输出,方便水源的输出,采用水箱盖8进行水箱的保护,方便水箱的保护,采用支撑板10进行支撑,方便支撑,采用水管转轮9进行水管的收纳,方便水管的收纳,采用高压喷头11进行清洗,方便清洗,采用电磁信号检测传感器12进行电磁信号感应,方便清洗车的行走,采用控制器14进行整体控制,方便智能化控制,采用水箱15进行水源的储存,方便水源的储存,采用转向电机16进行方向调整,方便方向的调整。
30.实施例2:
31.请参阅图4,一种全自动猪舍粪道清洗车系统,包括系统,系统包括电源模块、电磁信号检测模块、控制器14、转速感应模块、动力模块、清洗模块和转向模块,电源模块通过线缆连接控制器14,控制器14通过线缆分别连接电磁信号检测模块、转速感应模块、动力模块、清洗模块和转向模块。
32.电源模块采用电源接口17进行电源的接入。
33.电磁信号检测模块采用电磁信号检测传感器12进行清洗车的正确行走。
34.转速感应模块通过转速传感器2对电机进行转速感应。
35.动力模块采用动力电机3进行动力的供应。
36.清洗模块通过高压喷头11进行猪舍的清洗。
37.转向模块采用转向电机16进行清洗车方向的调整。
38.具体的,采用电源模块进行电源接入,方便电源的接入,采用电磁信号检测模块进行电磁信号感应,方便清洗车正确的行走,采用转速感应模块进行电机转速感应,方便转速的感应,采用动力模块进行动力供应,方便动力的供应,采用清洗模块进行清洗,方便清洗,采用转向模块进行方向控制,方便方向的控制。
39.工作原理:本实用新型一种全自动猪舍粪道清洗车系统,电源接口17通过电源模块连接电源,装置内部通电,动力电机3开始工作带动水泵4抽水,打开水箱盖8为水箱15加水,将高压喷头11通过水管连接在出水口7上,并将进水口6与水箱15连通,打开阀门5开始清洗,在猪舍内,地面铺设一条电磁信号漆包线,电磁信号检测传感器12检测地面上的电磁信号,电磁信号检测传感器12检测出地面的电磁信号漆包线的信号,当车子向左边偏移的时候,左边的电磁信号弱,右边的电磁信号强,根据左右两边的电磁信号的强弱来判断车子偏移中心电磁信号漆包线的距离,电磁信号检测传感器12会将信息传输给控制器14,控制器14控制转向模块通过转向电机16进行方向的调整,转向电机16控制车轮13进行方向调整,保证清洗车直线行走,转速传感器2通过转速感应模块对动力电机3和转向电机16的转速进行感应,将信息传输给控制器14,控制器14对转速进行控制,控制器14控制整体的同时,高压喷头11对准猪舍内的粪道进行高压清洗,清洗完毕后关闭阀门5,将电线从电源接口17拔出,将清洗车放置原位。
40.以上显示和描述了本实用新型的基本原理和主要特征和本实用新型的优点,对于本领域技术人员而言,显然本实用新型不限于上述示范性实施例的细节,而且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新型;因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内,不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
41.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1