一种气力式剔补苗自动移栽系统
1.本实用新型涉及农业移栽设备技术领域,具体涉及一种气力式剔补苗自动移栽系统。
背景技术:
2.近年来,随着蔬菜种植面积的逐年扩大,穴盘育苗也逐渐成为主要的育苗方式,穴盘育苗具有出苗率高且整齐、缓苗快、病虫害少等众多优点。但穴盘育苗时由于未播到种、种子未发芽或幼苗发育不良等原因会造成5%-20%的缺苗和劣苗,导致穴盘利用率低,若不剔除,影响后续成品苗的出售和机械化移栽。国内目前剔补苗作业还是以手工作业为主,劳动强度大,劳动力成本高,因此,研究设计一种高效、可靠地自动化剔补苗移栽设备,对于提高穴盘育苗自动化水平,提高设施农业生产效益具有重要意义。
3.中国专利cn112616504a一种自动剔补苗作业机,包括两条输送线、拍照组件、顶苗组件、剔苗组件和补苗组件,两条输送线分别用于输送工作苗盘和备用苗盘,通过相机自动拍摄苗盘上的种苗状况,分析识别苗盘中需要换苗的位置,并通过相应的剔苗机械爪及时剔除劣苗基质,再由机械手从备用的苗盘中移栽健康的种苗到缺失位置,完成补苗。该装置能够完成穴盘剔补苗的自动化作业,但劣苗基质剔除率低,难以实现成品化应用。
4.有鉴于此,需要一种气力式剔补苗自动移栽系统,采用气吸式剔苗装置来剔除缺苗和劣苗基质,提高基质剔除率,将穴盘幼苗信息监测、剔除缺苗劣苗基质和补苗作业环节进行整合,实现穴盘剔补苗的自动化作业。目前,国内的剔补苗设备基质剔除率低,难以实现成品化应用,因此,气力式剔补苗自动移栽系统的研究对于提高生产效率及减轻劳动强度具有一定意义。
技术实现要素:
5.针对上述现有剔补苗技术的不足,本实用新型提出一种采用气吸式剔苗来提高基质剔除率的气力式剔补苗移栽系统。
6.本实用新型通过下列技术方案实现:该系统包括可升降门式图像采集装置、气吸式剔苗装置、夹茎式补苗装置、输送装置和机架,可升降门式图像采集装置升起前后门板,待剔补穴盘进入可升降门式图像采集装置,经光电传感器ⅰ检测停止,可升降门式图像采集装置降下前后门板,形成封闭的图像采集空间,安装于顶板上的led灯带提供光源,摄像头采集图像进行检测;检测完成后可升降门式图像采集装置升起前后门板,输送装置输送待剔补穴盘至气吸式剔苗装置,经光电传感器ⅱ检测停止,由剔苗机械臂带动气吸端口进行剔苗作业;剔苗作业完成后输送装置输送待剔补穴盘到达夹茎式补苗装置,补苗机械臂带动夹茎式补苗末端执行器进行补苗作业,完成待剔补穴盘的剔补苗移栽作业;本实用新型设计可升降门式图像采集装置和气吸式剔苗装置,提高了剔补苗作业的自动化水平和缺苗、劣苗基质剔除率。
7.一种气力式剔补苗自动移栽系统,包括可升降门式图像采集装置、气吸式剔苗装
置、夹茎式补苗装置、输送装置、机架和控制系统,其特征在于:所述可升降门式图像采集装置由led灯带、摄像头、型材支架、光电传感器ⅰ、顶板、前后门板及升降装置组成,升降装置包括滑动轮、电机、齿轮、齿条,滑动轮安装在前后门板侧边底部,与型材支架槽内部接触,安装在可升降门式图像采集装置内部的光电传感器ⅰ检测到待剔补穴盘后,输送装置停止运动,安装在顶板上led灯带提供光源,摄像头拍摄穴盘图像进行检测;所述气吸式剔苗装置由剔苗机械臂、气吸软管、收集桶、气吸端口、橡胶垫和光电传感器ⅱ组成,橡胶垫安装在气吸端口底部,气吸端口连接气吸软管,气吸软管连接收集桶,当光电传感器ⅱ检测到待剔补穴盘时,输送装置停止运动,剔苗机械臂带动气吸端口定位穴盘缺苗和劣苗穴孔进行剔苗作业,缺苗和劣苗基质经气吸软管被吸入收集桶;所述夹茎式补苗装置由补苗机械臂、夹茎式补苗末端执行器、光电传感器ⅲ和供苗支撑架组成,夹茎式补苗末端执行器包括手指气缸、连接滑块、夹指、海绵垫,当光电传感器ⅲ检测到待剔补穴盘时,输送装置停止运动,补苗机械臂带动夹茎式补苗末端执行器夹取放置在供苗支撑架上供苗穴盘内的幼苗补入待剔补穴盘空穴孔内;所述输送装置包括输送带和输送辊,输送待剔补穴盘完成作业。
8.优选的,所述升降门式图像采集装置由升降装置控制前后门板的升降,前后门板升起的高度由穴盘苗株高决定,前后门板降下时可形成封闭的图像采集空间,避免外界光源影响图像质量。
9.优选的,所述升降门式图像采集装置由电机带动齿轮转动,齿轮与齿条啮合带动前后门板升降,滑动轮滑动减小前后门板的滑动阻力。
10.优选的,所述气吸式剔苗装置的气吸端口底部安装橡胶垫,橡胶垫的尺寸与穴盘穴孔尺寸相适应,有减震和隔开其他穴孔的作用。
11.优选的,所述夹茎式补苗末端执行器由手指气缸驱动连接滑块,连接滑块带动夹指探入夹紧幼苗茎秆,夹指设计成斜夹式,减小对幼苗苗叶的机械损伤。
12.优选的,所述夹茎式补苗末端执行器在夹指与幼苗茎秆接触处附一层海绵垫,增大与幼苗茎秆的摩擦力,同时减小对幼苗茎秆的损伤。
13.综上所述,本实用新型具有以下有益效果,本实用新型提供了一种气力式剔补苗自动移栽系统,能够实现穴盘育苗过程中剔补苗作业的自动化,提高基质剔除率,保证穴盘育苗后续成品苗的出售和机械化移栽效果。
附图说明
14.下面结合附图和实施方式对本实用新型进一步说明。
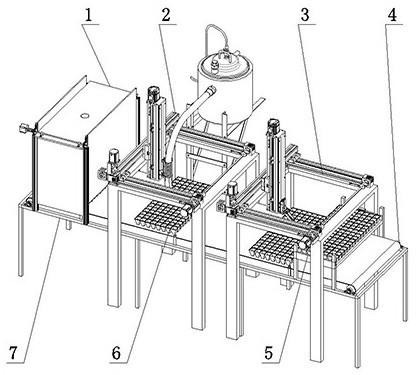
15.图1为一种气力式剔补苗自动移栽系统整体结构示意图;
16.图2为可升降门式图像采集装置1的结构主剖视图;
17.图3为可升降门式图像采集装置1的轴测图;
18.图4为气吸式剔苗装置2的右视图;
19.图5为夹茎式补苗装置3和输送装置4的主视图;
20.图6为夹茎式补苗末端执行器302的结构示意图。
21.以下是图中各部件标号:可升降门式图像采集装置1、气吸式剔苗装置2、夹茎式补苗装置3、输送装置4、供苗穴盘5、待剔补穴盘6、机架7、led灯带101、摄像头102、型材支架103、升降装置104、光电传感器ⅰ105、顶板106、前后门板107、滑动轮104a、电机104b、齿轮
104c、齿条104d、剔苗机械臂201、气吸软管202、收集桶203、气吸端口204、橡胶垫205、光电传感器ⅱ206、补苗机械臂301、补苗末端执行器302、光电传感器ⅲ303、供苗支撑架304、手指气缸302a、连接滑块302b、夹指302c、海绵垫302d、输送带401、输送辊402。
具体实施方式
22.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
23.在本实用新型的描述中,需要理解的是,术语“上”、“下”、“前”、“后”“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
24.如图1、2、3、4、5、6所示,本实用新型的一种气力式剔补苗移栽系统,包括可升降门式图像采集装置1、气吸式剔苗装置2、夹茎式补苗装置3、输送装置4、供苗穴盘5、待剔补穴盘6、机架7、led灯带101、摄像头102、型材支架103、升降装置104、光电传感器ⅰ105、顶板106、前后门板107、滑动轮104a、电机104b、齿轮104c、齿条104d、剔苗机械臂201、气吸软管202、收集桶203、气吸端口204、橡胶垫205、光电传感器ⅱ206、补苗机械臂301、补苗末端执行器302、光电传感器ⅲ303、供苗支撑架304、手指气缸302a、连接滑块302b、夹指302c、海绵垫302d、输送带401、输送辊402。其中:所述可升降门式图像采集装置1包括led灯带101、摄像头102、型材支架103、升降装置104、光电传感器ⅰ105、顶板106、前后门板107,安装在可升降门式图像采集装置内部的光电传感器ⅰ105检测到待剔补穴盘6时,输送装置4停止输送,升降装置104降下前后门板107,安装于顶板106的led灯带101提供光源,摄像头102采集图像并检测;检测完成后,输送装置4输送待剔补穴盘6到达气吸式剔苗装置2,气吸式剔苗装置2包括剔苗机械臂201、气吸软管202、收集桶203、气吸端口204、橡胶垫205、光电传感器ⅱ206,光电传感器ⅱ206检测到待剔补穴盘6时,输送装置4停止输送,剔苗机械臂201带动气吸端口204剔除缺苗、劣苗基质,基质经气吸软管202被吸入收集桶203中;剔苗作业完成后输送装置4输送待剔补穴盘6到达夹茎式补苗装置3中,夹茎式补苗装置3包括补苗机械臂301、补苗末端执行器302、光电传感器ⅲ303、供苗支撑架304,待剔补穴盘6经光电传感器ⅲ303检测停止,补苗机械臂301带动夹茎式补苗末端执行器302从供苗支撑架304上供苗穴盘5中夹取健康幼苗补入待剔补穴盘6;输送装置4包括输送带401和输送辊402,输送待剔补穴盘6完成剔补苗作业。
25.具体工作过程:
26.工作时,待剔补穴盘6放置于输送带401上,通过输送辊402的旋转作用带动输送带上的待剔补穴盘6进入可升降式图像检测装置1,光电传感器ⅰ105检测到待剔补穴盘6时,输送装置4停止输送,升降装置104降下前后门板107,摄像头102采集图像并检测缺苗和劣苗,用于后续剔苗及补苗作业,检测完成后,待剔补穴盘6继续运动,到达气吸式剔苗装置2,光电传感器ⅱ206检测到待剔补穴盘6时,输送装置4停止输送,剔苗机械臂201在图像检测信息指导下带动气吸端口204剔除缺苗、劣苗基质,基质经气吸软管202被吸入收集桶203中,剔苗作业完成后,输送装置4继续输送待剔补穴盘6到达夹茎式补苗装置,光电传感器ⅲ303
检测停止,补苗机械臂301带动夹茎式补苗末端执行器302从供苗支撑架304上供苗穴盘5中夹取健康幼苗补入待剔补穴盘6,完成穴盘剔补苗的自动化作业。
27.所述升降门式图像采集装置1由升降装置104控制前后门板107的升降,前后门板107升起的高度由穴盘苗株高决定,前后门板107降下时可形成封闭的图像采集空间,避免外界光源影响图像质量。
28.所述升降门式图像采集装置1由电机104b带动齿轮104c转动,齿轮104c与齿条104d啮合带动前后门板107升降,滑动轮104a滑动减小前后门板107的滑动阻力。
29.所述气吸式剔苗装置2的气吸端口204底部安装橡胶垫205,橡胶垫205的尺寸与穴盘穴孔尺寸相适应,有减震和隔开其他穴孔的作用。
30.所述夹茎式补苗末端执行器302由手指气缸302a驱动连接滑块302b,连接滑块302b带动夹指302c探入夹紧幼苗茎秆,减小对幼苗苗叶的机械损伤。
31.所述夹茎式补苗末端执行器302在夹指302c与幼苗茎秆接触处附一层海绵垫302d,增大与幼苗茎秆的摩擦力,同时减小对幼苗茎秆的损伤。
32.以上对本实用新型的具体实施例进行了描述。需要理解的是,本实用新型并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变形或修改,这并不影响本实用新型的实质内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1