一种基于机器视觉功能的串型番茄采摘机器人
1.本实用新型涉及番茄采摘技术领域,尤其涉及一种基于机器视觉功能的串型番茄采摘机器人。
背景技术:
2.我国果蔬种植面积占世界果蔬种植总面积的20.39%,其中番茄在我国栽培面积最大、生产总量最多,其每年产量高达6000万吨,占全国蔬菜总产量的7.1%。
3.番茄采摘主要依靠人工完成,采摘费用为1.05万元/hm2,占生产总成本的30%以上,劳动力投入占整个种植环节中的50%~70%。
4.我国人口老龄化加剧,农业从业人口大大减少,低效率的人工采摘势必导致采摘成本越来越高,并且随着规模化、工厂化种植业的盛行,人工采摘作业很难适应市场发展的需要。现有的采摘机器人多采用单个抓取的方式,采摘效率差。在具体的机械结构上高度调节不灵活,难以适应实际的采摘场景。番茄采摘过程中,需要人工控制参与,番茄采摘后无法精准计算采摘数量及自动倾倒入筐,自动化不足,且收集筐内部不带有一定的减震缓冲的作用,在进行番茄倾倒时,容易对番茄造成损坏,不方便人们的使用。
技术实现要素:
5.为解决现有技术的缺点和不足,提供一种基于机器视觉功能的串型番茄采摘机器人,不仅可以提高农业生产力,解决劳动力不足,降低农民劳动强度,提高农民劳动舒适性,降低作业成本,而且还可以改变农业生产模式,实现农业生产的规模化、多样化和精准化。
6.为实现本实用新型目的而提供的一种基于机器视觉功能的串型番茄采摘机器人,包括有固定箱,所述固定箱的顶部通过固定板固定连接有挡板,所述固定箱的顶部设置有升降机构,所述升降机构的一侧设置有升降板,所述升降板的底部固定连接有连接箱,所述连接箱的内壁固定连接有电动伸缩杆,所述电动伸缩杆的另一端通过销轴活动连接有采摘篮,所述采摘篮底部内壁设置有重量感应器,所述采摘篮底部的另一侧通过销轴与升降板的顶部活动连接,所述升降板的顶部固定连接有支撑板,所述支撑板的一侧固定连接有存放箱,所述存放箱的顶部固定连接有舵机云台,所述舵机云台的顶部固定连接有高清摄像头,所述存放箱内设置有用以采摘串型番茄的切割机构,所述固定箱的顶部设置有总控制器,所述固定箱的顶部对应所述采摘篮固定连接有收集箱,所述收集箱的内壁活动连接有活动板,所述活动板的底部设置有减震机构,所述固定箱的底部设置有车轮。
7.作为上述方案的进一步改进,所述减震机构包括有第一固定块、移动杆、第二固定块、滑动块、支撑杆和第一弹簧,所述第一固定块的底部与收集箱的内壁固定连接,所述第一固定块的正面通过销轴与移动杆的一端活动连接,所述移动杆的另一端通过销轴与第二固定块的正面活动连接,所述第二固定块的顶部与滑动块的底部固定连接,所述滑动块的内部与支撑杆的表面活动连接,所述支撑杆的两端均与活动板的内壁固定连接,所述支撑杆的表面与第一弹簧的内部活动连接,所述第一弹簧的一端与活动板的内壁固定连接,所
述第一弹簧的另一端与滑动块的一侧固定连接。
8.作为上述方案的进一步改进,所述活动板的底部活动连接有限位块,所述限位块的表面活动连接有第二弹簧,所述第二弹簧的顶端与活动板的底部固定连接,所述第二弹簧的另一端与收集箱的内壁固定连接。
9.作为上述方案的进一步改进,所述升降机构包括有第二电机、转杆、第一锥形齿轮、第二锥形齿轮、第二螺杆和升降块,所述第二电机的一侧与固定箱的一侧固定连接,所述第二电机的一侧与转杆的一端固定连接,所述转杆的另一端延伸至固定箱的内部并通过轴承与固定箱的内壁活动连接,所述转杆的表面与第一锥形齿轮的内部固定连接,所述第一锥形齿轮的顶部与第二锥形齿轮的一侧啮合,所述第二锥形齿轮的顶部与第二螺杆的一端固定连接,所述第二螺杆的另一端延伸至固定箱的外部并通过轴承与挡板的底部活动连接,所述第二螺杆的表面与升降块的内部螺纹连接,所述升降块的一侧与升降板的一侧固定连接。
10.作为上述方案的进一步改进,所述升降块的另一侧固定连接有辅助块,所述辅助块的内部活动连接有固定杆,所述固定杆的一端与挡板的底部固定连接,所述固定杆的另一端与固定箱的顶部固定连接。
11.作为上述方案的进一步改进,所述第二电机的底部固定连接有底板,所述底板的一侧与固定箱的一侧固定连接。
12.作为上述方案的进一步改进,所述切割机构包括有刀片以及第一电机,所述第一电机固定连接在存放箱的内壁,所述第一电机的另一侧固定连接有第一螺杆,所述第一螺杆的另一端通过轴承与存放箱的内壁活动连接,所述第一螺杆的表面螺纹连接有活动块,所述活动块的顶部固定连接有连接板,所述连接板的一侧固定连接有连接杆,所述连接杆的另一端与所述刀片固定连接。
13.作为上述方案的进一步改进,所述存放箱的内壁活动连接有隔板,所述隔板的内部与第一螺杆的表面活动连接。
14.本实用新型的有益效果是:
15.与现有技术相比,本实用新型提供一种基于机器视觉功能的串型番茄采摘机器人,通过电机控制存放箱中的刀片,完成番茄串母枝的剪切,使串型番茄自动掉入采摘蓝,解决了单个抓取采摘效率低的问题,通过升降机构与视觉模块解决了现有的采摘机器人不方便高度调节,人工参与较多,自动化与智能化不足的问题,通过重量感应器与电动伸缩杆,解决了现有采摘机器人无法精准判断采摘数量,自动倾倒入框的问题,通过收集筐底部的缓冲机构解决了倾倒过程中番茄容易破损的问题。
16.具体有如下技术效果:
17.1、本实用新型中,通过搭载在两自由度的舵机云台之上的高清摄像头获取实时采摘场景,利用总控制器中的串型番茄识别算法及cpu算力,从该场景中依次识别并定位成熟番茄串,同时获取成熟番茄串母枝的三维坐标,(上述的操作方法可以通过实用新型专利,发文号为cn2021082800591310,名称为“一种基于改进yolov5的串型番茄实时检测方法”,申请号为:202110999230.3)控制升降机构到目标位置,接着控制存放箱中的刀片对番茄串母枝进行剪切;将隔板安装在存放箱的内部,能够有效限制活动块的活动范围,在有效切割番茄串母枝的同时,避免两个刀片的过度碰撞;番茄串落入采摘篮中,当采摘篮内壁重量感
应器感应到番茄重量超过设定阈值,电动伸缩杆升起,带动采摘篮倾斜,将番茄倒入收集箱中;通过以上设置,解决了现有采摘机器人自动化不足,采摘效率差,无法精准判断采摘重量,自动倾倒入收集箱的问题;完成了番茄串识别,定位,采摘,收集的一系列连续自动化过程。
18.2、本实用新型中,通过设置升降机构,利用第二电机带动转杆转动,转杆带动第一锥形齿轮、第二锥形齿轮和第二螺杆转动,第二螺杆带动升降块和升降板上下移动,能够方便调节升降板的高度,将辅助块和固定杆安装在升降块的一侧,能够辅助升降块的移动,将底板安装在第二电机的底部,作为第二电机的支撑板;通过设置升降机构,解决了现有的采摘机器人不能自由调节高度,采摘灵活度低,不便于人们使用等问题;
19.3、本实用新型中,通过设置减震机构,番茄落入收集箱的内部带动活动板产生震动,活动板带动支撑杆上下移动,支撑杆带动滑动块移动,滑动块带动第一弹簧拉伸,滑动块带动第二固定块移动,第二固定块带动移动杆以第一固定块为支撑点转动,能够对活动板进行减震,有效减少番茄与活动板之间碰撞的冲击力;将限位块和第二弹簧安装在活动板的底部,能够辅助活动板的进一步减震;解决现有采摘机器人在倾倒过程中番茄容易破损的问题。
附图说明
20.以下结合附图对本实用新型的具体实施方式作进一步的详细说明,其中:
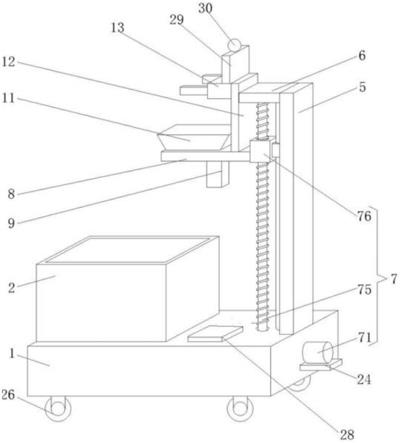
21.图1为本实用新型结构的示意图;
22.图2为本实用新型结构的剖视图;
23.图3为本实用新型结构图2中a的结构放大图;
24.图4为本实用新型结构中存放箱俯视剖视示意图。
25.图中:1、固定箱;2、收集箱;3、活动板;4、减震机构;41、第一固定块;42、移动杆;43、第二固定块;44、滑动块;45、支撑杆;46、第一弹簧;5、固定板;6、挡板;7、升降机构;71、第二电机;72、转杆;73、第一锥形齿轮;74、第二锥形齿轮;75、第二螺杆;76、升降块;8、升降板;9、连接箱;10、电动伸缩杆;11、采摘篮;12、支撑板;13、存放箱;14、第一电机;15、第一螺杆;16、活动块;17、连接板;18、连接杆;19、刀片;20、辅助块;21、固定杆;22、限位块;23、第二弹簧;24、底板;25、隔板;26、车轮;27、重量感应器;28、总控制器;29、舵机云台;30、高清摄像头
具体实施方式
26.如图1-图4所示,本实用新型提供的一种基于机器视觉功能的串型番茄采摘机器人,包括固定箱1,固定箱1的顶部放置有总控制器28,固定箱1的顶部固定连接有收集箱2,收集箱2的内壁活动连接有活动板3,活动板3的底部设置有减震机构4,固定箱1的顶部固定连接有固定板5,固定板5的顶部固定连接有挡板6,固定箱1的顶部设置有升降机构7,升降机构7的一侧设置有升降板8,升降板8的底部固定连接有连接箱9,连接箱9的内壁固定连接有电动伸缩杆10,电动伸缩杆10的另一端通过销轴活动连接有采摘篮11,采摘篮11底部内壁装有重量感应器27,采摘篮11底部的另一侧通过销轴与升降板8的顶部活动连接,升降板8的顶部固定连接有支撑板12,支撑板12的一侧固定连接有存放箱13,存放箱13的顶部固定
连接有舵机云台29,舵机云台29的顶部固定连接有高清摄像头30,存放箱13内设置有用以采摘串型番茄的切割机构,切割机构包括有固定连接在存放箱13的内壁的第一电机14,第一电机14的另一侧固定连接有第一螺杆15,第一螺杆15的另一端通过轴承与存放箱13的内壁活动连接,第一螺杆15的表面螺纹连接有活动块16,活动块16的顶部固定连接有连接板17,连接板17的一侧固定连接有连接杆18,连接杆18的另一端固定连接有刀片19,固定箱1的底部设置有车轮26。
27.通过设置升降机构7,能够方便调节升降板8的高度,利用第一电机14带动第一螺杆15转动,第一螺杆15带动活动块16、连接板17、连接杆18和刀片19左右移动,能够对番茄进行采摘,采摘下来的番茄落入采摘篮11内部,采摘篮11番茄堆积超过重量感应器27的设定阈值时,利用电动伸缩杆10撑起采摘篮11一侧,形成采摘篮11倾斜,将番茄倾倒入收集箱2的内部,通过设置减震机构4,能够对活动板3进行减震,解决了现有的采摘机器人采摘高度难以调节,采摘效率差,且收集筐内部不具有一定减震缓冲的作用,番茄在进行倾倒时,容易对番茄造成损坏,不方便人们使用的问题。
28.在本实施例中,减震机构4包括第一固定块41、移动杆42、第二固定块43、滑动块44、支撑杆45和第一弹簧46,第一固定块41的底部与收集箱2的内壁固定连接,第一固定块41的正面通过销轴与移动杆42的一端活动连接,移动杆42的另一端通过销轴与第二固定块43的正面活动连接,第二固定块43的顶部与滑动块44的底部固定连接,滑动块44的内部与支撑杆45的表面活动连接,支撑杆45的两端均与活动板3的内壁固定连接,支撑杆45的表面与第一弹簧46的内部活动连接,第一弹簧46的一端与活动板3的内壁固定连接,第一弹簧46的另一端与滑动块44的一侧固定连接。通过设置减震机构4,番茄落入收集箱2的内部带动活动板3产生震动,活动板3带动支撑杆45上下移动,支撑杆45带动滑动块44移动,滑动块44带动第一弹簧46伸缩,滑动块44带动第二固定块43移动,第二固定块43带动移动杆42以第一固定块41为支撑点转动,能够对活动板3进行减震。
29.在本实施例中,升降机构7包括第二电机71、转杆72、第一锥形齿轮73、第二锥形齿轮74、第二螺杆75和升降块76,第二电机71的一侧与固定箱1的一侧固定连接,第二电机71的一侧与转杆72的一端固定连接,转杆72的另一端延伸至固定箱1的内部并通过轴承与固定箱1的内壁活动连接,转杆72的表面与第一锥形齿轮73的内部固定连接,第一锥形齿轮73的顶部与第二锥形齿轮74的一侧啮合,第二锥形齿轮74的顶部与第二螺杆75的一端固定连接,第二螺杆75的另一端延伸至固定箱1的外部并通过轴承与挡板6的底部活动连接,第二螺杆75的表面与升降块76的内部螺纹连接,升降块76的一侧与升降板8的一侧固定连接。通过设置升降机构7,利用第二电机71带动转杆72转动,转杆72带动第一锥形齿轮73、第二锥形齿轮74和第二螺杆75转动,第二螺杆75带动升降块76和升降板8上下移动,能够方便调节升降板8的高度。在本实施例中,升降块76的另一侧固定连接有辅助块20,辅助块20的内部活动连接有固定杆21,固定杆21的一端与挡板6的底部固定连接,固定杆21的另一端与固定箱1的顶部固定连接。通过设置辅助块20和固定杆21,将辅助块20和固定杆21安装在升降块76的一侧,能够辅助升降块76的移动。
30.在本实施例中,活动板3的底部活动连接有限位块22,限位块22的表面活动连接有第二弹簧23,第二弹簧23的顶端与活动板3的底部固定连接,第二弹簧23的另一端与收集箱2的内壁固定连接。通过设置限位块22和第二弹簧23,将限位块22和第二弹簧23安装在活动
板3的底部,能够辅助活动板3的减震。
31.在本实施例中,第二电机71的底部固定连接有底板24,底板24的一侧与固定箱1的一侧固定连接。通过设置底板24,将底板24安装在第二电机71的底部,能够为第二电机71提供支撑。
32.在本实施例中,存放箱13的内壁活动连接有隔板25,隔板25的内部与第一螺杆15的表面活动连接。通过设置隔板25,将隔板25安装在存放箱13的内部,能够限制活动块16的活动范围,在有效切割番茄串母枝的同时,避免两个刀片的过度碰撞,起到保护刀片的作用。
33.在本实施例中,第一电机14,第二电机71,电动伸缩杆10,舵机云台29,高清摄像头30均受总控制器28统一控制,完成番茄串识别,定位,采摘,收集的一系列连续自动化过程。在固定箱1的顶部放置总控制器28,控制舵机云台29及高清摄像头30获取实时采摘场景,利用串型番茄识别算法获取番茄串母枝坐标位置,完成识别定位任务。
34.本实用新型的工作原理是:通过控制两自由度的舵机云台29,调整高清摄像头30获取实时的采摘场景,利用总控制器28中的串型番茄识别算法及cpu算力,从该场景中依次识别定位成熟番茄串,并获取番茄串母枝的三维坐标,总控制器27控制启动第二电机71,第二电机71带动转杆72转动,转杆72带动第一锥形齿轮73转动,第一锥形齿轮73带动第二锥形齿轮74转动,第二锥形齿轮74带动第二螺杆75转动,第二螺杆75带动升降块76上下移动,升降块76带动升降板8上下移动,能够方便调节升降板8的高度,控制存放箱13到目标番茄串高度。启动第一电机14,第一电机14带动第一螺杆15转动,第一螺杆15带动活动块16左右移动,活动块16带动连接板17左右移动,连接板17带动连接杆18左右移动,连接杆18带动刀片19左右移动,能够对番茄串母枝进行剪切,采摘下来的番茄落入采摘篮11内部。当采摘篮11内壁重量感应器27感应到番茄重量超过设定阈值,总控制器28启动电动伸缩杆10,电动伸缩杆10带动采摘篮11一侧升起形成倾斜,将番茄倾倒入收集箱2的内部,番茄落入收集箱2的内部带动活动板3产生震动,活动板3带动支撑杆45上下移动,支撑杆45带动滑动块44移动,滑动块44带动第一弹簧46拉伸,滑动块44带动第二固定块43移动,第二固定块43带动移动杆42以第一固定块41为支撑点转动,能够对活动板3进行减震。同时,安装在活动板底部的限位块22和第二弹簧23,能够辅助活动板3的减震,使番茄与活动板的碰撞压力达到最小,有效减缓番茄与活动板的碰撞压力,减少番茄损伤。
35.以上实施例不局限于该实施例自身的技术方案,实施例之间可以相互结合成新的实施例。以上实施例仅用以说明本实用新型的技术方案而并非对其进行限制,凡未脱离本实用新型精神和范围的任何修改或者等同替换,其均应涵盖在本实用新型技术方案的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1