全自动猫砂盆的制作方法
1.本实用新型涉及一种猫砂盆,尤其涉及一种全自动猫砂盆。
背景技术:
2.猫咪的排泄物虽具有强烈刺鼻的气味,但猫咪具有扒砂掩盖每天大小便后的排泄物的本能。无论是猫咪饲养者家庭卫生的要求,还是随顺猫咪自身本能,猫砂盆都是猫咪饲养者的必需品。根据粪便和猫砂分离、储存的动力来源的不同,猫砂盆可分为手动、半自动和全自动的,全自动猫砂盆是自动识别猫咪排便、自动分离猫砂猫粪和存储猫粪、自动复位猫砂的猫砂盆。
3.现有的全自动猫砂盆,包括绕支架翻转运动的砂盆,也包括用于完成自动识别功能的生物监测器和控制器。砂盆的翻转运动是由控制器控制卷扬机通过一拉带带动并实现的,拉带与重心的平衡采用了杠杆原理。但是由于重力和拉带作用力的不同步,导致产品工作的可靠性不高,影响了自动筛除和自动存储猫粪便、自动复原猫砂的功能的完成。
4.业内针对猫咪的排泄物气味的处理,一般就是在猫砂盆上方加一个有门的罩子,方便猫咪进出猫砂盆,又能将气味封闭在一个空间,减少气味的扩散;除此之外,也在猫砂的本身做一些改进:比如增加猫砂的清香气味,中和刺鼻的排泄物气味;也有增加活性炭等吸附物;但是,这些手段都是被动吸附方法,因而吸附能力有限,而且其吸附速度很慢。
5.以上是现有技术的不足之处。
6.对于一个爱猫者而言,更愿意在一个空气清新的房间享受与爱猫相处,而不愿意费心费力去清理猫粪便和处理刺鼻的气味而劳心劳力。如何简单、可靠地自动处理猫砂中的排泄物,尤其是臭气,是一个养猫人的必须做的繁琐的工作。
技术实现要素:
7.本实用新型要解决的技术问题是提供一种全自动猫砂盆,它可以更可靠地实现砂仓的翻转运动和复位,并自动处理猫粪。
8.本实用新型的技术方案是:一种全自动猫砂盆,包括支架、砂盆和砂仓,所述砂盆和砂仓组合成一体并通过一转轴枢接于该支架上,还包括生物监视器、驱使所述组合体绕轴旋转的翻转驱使机构、位置传感器和控制器,所述位置传感器检测所述组合体的旋转位置,所述控制器接收所述位置传感器和生物监视器的数据、自动完成对所述翻转驱使机构的控制,所述翻转驱使机构包括设于所述支架上的驱动电机、与该驱动电机的机轴相连的齿轮,和设于所述砂仓背部的与所述齿轮啮合的圆弧形齿条,该圆弧形齿条的圆心在所述转轴上。
9.所述齿条是由一条柔性的齿带通过压条安装在所述砂仓背部上。
10.所述控制器包括mcu单元、驱动控制单元、位置传感单元和延时设定单元,所述mcu单元连接所述生物监视器,所述位置传感单元连接所述位置传感器,所述驱动控制单元连接所述驱动电机、还包括执行如下步骤的程序:
11.mcu单元不断检测生物监视器,判断猫咪是否进入砂盆进行大小便;
12.当判断猫咪进入砂盆并完成大小便,当计时达到延时设定单元设定的延时时,mcu单元向驱动器控制单元发出驱动电机正传的指令,该指令控制驱动电机正传,通过齿轮、齿条转动,带动猫砂盆绕着支架翻转;
13.mcu单元检测位置传感器,当猫砂盆达到设定位置,mcu单元向驱动器控制单元发出驱动电机停机、刹车指令并开启刹车延时计时;
14.当计时达到延时设定单元设定的延时时,mcu单元向驱动器控制单元发出驱动电机反传的指令,该指令控制驱动电机反传,通过齿轮、齿条转动,带动猫砂盆绕着支架复位;
15.mcu单元检测位置传感单元,当猫砂盆达到设定复位位置,mcu单元向驱动器控制单元发出驱动电机停机指令。
16.所述位置传感器包括各设于所述圆弧形齿条的最高处和最低处的hall传感器,和所述齿轮处的磁钢。
17.还包括位于所述砂盆和砂仓的组合体上的罩盖,所述罩盖、砂盆和砂仓形成密封空间。
18.在所述罩壳和砂仓、砂盆的接合面上,对应分别安装有极性相反的磁钢,和一对砂仓电极和罩壳电极,所述罩盖内设有臭氧发生器。
19.在所述罩盖内腔,设有将整个臭氧发生器包裹起来的透气的防护罩。
20.所述砂仓上设有与所述转轴轴线平行的通槽。
21.本实用新型的技术效果是:
22.一、支架上的齿轮和砂仓上的齿条驱动猫砂盆绕着支架实现翻转,混合粪便的猫砂向砂仓方向流动,当混合猫砂漏过网筛,大体积的粪便留在网筛上面,小体积的干净猫砂漏进下面的空腔;当达到最高位,分离出来的粪便滑向便盒存储起来;驱动马达反转,猫砂盆绕着支架实现复位,空腔内的干净猫砂再次滑向砂盆。可见,实现自动分离猫粪猫砂、存储猫粪和复位猫砂的翻转运动,主要是在通过齿条和电机驱动的齿轮的配合下完成的,在此过程中,由于齿条和齿轮的啮合,相较于现有技术,其工作可靠性更高。
23.二、本实用新型,通过位于所述砂盆和砂仓的组合体上的罩盖,所述罩盖、砂盆和砂仓形成密封空间,可以基本防止猫粪气味的扩散。
24.三、本实用新型,通过生物监测器,可判别猫咪是否进入猫砂盆进行大小便;当判断猫咪开始排泄、产生刺鼻气味同时,启动臭氧发生器产生具有高度氧化功能的臭氧,对猫咪产生的、具有刺鼻气味的气态物质进行氧化除臭。
25.四、由于齿条是一条柔性齿带通过压条安装在砂仓上的,在与齿轮的啮合过程中,工作噪音大大降低。
附图说明
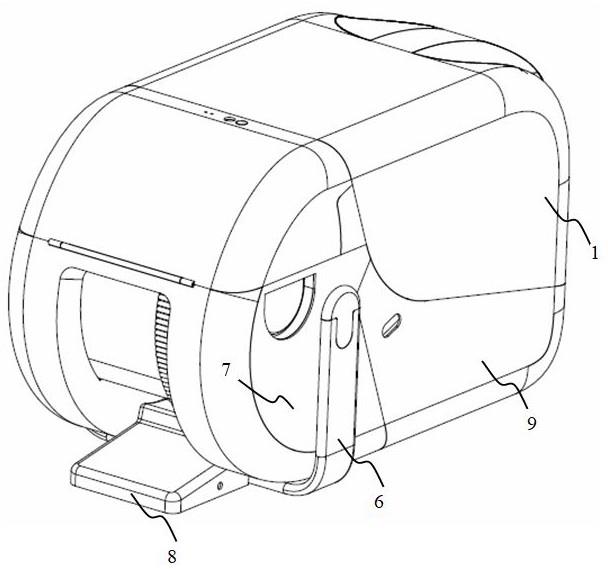
26.图1是本实用新型的全自动猫砂盆的立体图(含罩壳)。
27.图2是本实用新型的全自动猫砂盆的另一视角的立体图(去掉罩壳)。
28.图3是本实用新型的全自动猫砂盆的主视图(具备罩壳)。
29.图4是图3的剖视图。
30.图5是图3的侧视图。
31.图6是本实用新型的控制器的电气结构示意图。
32.图7是本实用新型的工作流程示意图。
具体实施方式
33.现结合附图,对本实用新型的实施例作详细说明。
34.参见图1~图5所示,本实用新型的全自动猫砂盆,是一种具有自动除臭功能的全自动猫砂盆,主要由罩盖1、砂盆9、砂仓7和支架6构成。砂仓7和砂盆9组合成一体,罩盖1安装在该组合体上方,罩盖、砂盆和砂仓形成一个密封的空间,在罩壳1的内腔,设有一臭氧发生器2,臭氧发生器2是一个高压脉冲电极,放电时将空气中的氧分子电离成臭氧,其放电端电压高达几kv,十分不安全,因而在罩盖1内腔,安装有一个透气的防护罩将整个臭氧发生器2包裹起来,防止电击到猫咪。
35.砂仓7上有一对转轴701,转轴701与支架6上的轴承配合,砂仓7就可绕着支架6实现翻转运动;支架6上安装有驱动器8,驱动器8由驱动板、驱动电机802和齿轮801组成;驱动板对驱动电机802进行正反转驱动控制;齿轮801与驱动电机802输出轴连接;砂仓7后背面上安装有齿条11;齿轮801和齿条11啮合;驱动电机802转动,通过齿轮801带动齿条11,就带动猫砂盆绕着支架6实现翻转和复位。
36.如图4~图5所示,显示了砂仓7背部的齿条11,考虑到产品的运行安静和降噪,齿条11是由一条柔性的齿轮带11a通过压条11b安装在砂仓7上的,而且,齿条11以转轴701为圆心的一段圆弧;压条11b上在最高和最低为止,还安装有各一个hall传感器;支架上,靠近齿轮801的地方,安装有一个磁钢;二者配合就可以检测砂盆翻转的位置。
37.如图3所示:砂仓7有一个安装储存盒5的滑槽;滑槽是一个贯穿砂仓7的通槽;储存盒5是一个一端有端盖的抽屉;端盖的外尺寸大于滑槽的截面积;抽屉的长度和滑槽相当;端盖有一个凹进去的拉手;拉手方便抽出和安装储存盒5;滑槽是一个通槽,这样储存盒5可以从砂仓7两个方向都可进行抽出和装入而不影响使用和美观。
38.砂仓7是一个一面开口的半封闭仓体;砂仓7的内腔可暂存筛选过猫粪的猫砂;在开口的端面,安装着网筛10;由于网筛10很容易被没有完全固化的猫粪便污染,需要经常取下来清洗;而且,在猫砂筛除猫粪便时,需要过滤猫粪便团;在复位时候,砂仓7里的猫砂又要流过网筛10回到砂盆9;所以要兼顾网筛10和砂仓7的结合强度和拆取安装便捷性。
39.砂仓7顶部安装有生物监视器3和控制器4;生物监视3是采用的热释电传感器+菲尼尔透镜,能够测量猫咪进入和离开砂盆9的信号;控制器4用来对该信号进行处理和判断;
40.如图6所示,主控器4核心是一个mcu单元401,包含有外围辅助电路:输入单元402、臭氧控制单元403、显示单元404、驱动控制单元405、位置传感单元406和震动控制单元407;输入单元402主要是人工参与到猫砂盆工作的控制按键;臭氧控制单元403对臭氧发生器2进行启停控制;显示单元404是对工作状态以及出错后错误信息的显示;驱动控制单元405是对驱动器8发出控制指令;位置传感单元406包含砂仓上的两个hall传感器和支架上的一个磁钢;hall传感器和磁钢能够检测到猫砂盆翻转的最高和最低位置;震动控制单元407控制震动马达703的启停。
41.罩壳1在清理猫砂盆和网筛时需要拆下来。为方便拆除和安装,在罩壳1和砂仓7、砂盆9的接合面,对应分别安装有极性相反的磁钢;罩壳1和砂仓7的接合面,还有一对砂仓
电极701和罩壳电极;砂仓电极连接除臭控制单元403;罩壳电极连接臭氧发生器2;砂仓电极701上所通过的是安全电压的直流电;这样,罩壳1取掉,砂仓电极701暴露在外,也不会产生安全隐患。
42.参照图7,其工作逻辑如下:
43.第一步:mcu单元不断检测生物传感器信号;当收到信号进入计时;当检测到信号延续超过设定时间;就判定猫咪已经进入猫砂盆开始排泄;
44.第二步:启动臭氧发生器产生生产臭氧,对猫砂盆内的气体进行主动氧化灭杀;
45.第三步:mcu检测到信号消失,开始猫砂吸附固化计时t;这个时间,让猫砂对猫的排泄物进行充分的吸水和固化,形成大体积的固态粪便团;
46.第四步:当计时达到设定的延时t,则mcu单元向驱动控制器和震动马达发出启动指令;震动马达带动网筛震动;猫砂盆开始绕着支架翻转;混合粪便团的猫砂流向网筛;由于网筛保持震动状态,大体积的固态粪便团留在网筛表面,小体积的猫砂漏向砂仓;随着猫砂盆翻转角度加大,当网筛和水平面平行且向负角度翻转时;网筛上面的固态粪便团开始滑向主体顶部再滑向储存盒;
47.第五步:mcu开始检测高位置传感器,当检测到猫砂盆已经翻转到最高位置,mcu单元向驱动控制器发出停止转动保持刹车;启动延时tk;这个时候,让粪便团继续向储存盒滑落;
48.第六步;当计时达到设定的延时tk,mcu单元向驱动控制器发出翻转指令;随着复位翻转,猫砂逐步从砂仓流经网筛回到砂盆;网筛的震动,能够极大提高猫砂流回速度和效率;
49.第七步:当mcu检测到复位位置传感器信号,向驱动控制器、震动马达和臭氧发生器发出停止指令;
50.第八步:返回第一步,等待下一次的工作。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1