有害生物监测设备的制作方法
有害生物监测设备
1.本发明涉及一种有害生物监测设备和一种监测有害生物诱捕器的方法。
背景技术:
2.有害生物是用来描述讨厌的动物或昆虫的术语。有害生物的示例可以包括啮齿动物、苍蝇、蟑螂和臭虫。在家庭和商业环境中,有害生物可能是令人讨厌的、难看的和/或有健康风险的。如果不直接遇到有害生物,通常很难检测到它们的存在。另外,常见的有害生物(比如跳蚤、蟑螂和臭虫)都是夜间活动的,因此通过被人遇到而被检测到的几率会降低。因此,已知安装诱捕器来检测各种有害生物。这些诱捕器用于捕捉有害生物,使得检查到有害生物的存在可以指示有害生物侵扰。
3.家庭和商业环境的所有者通常采取措施来持续监测房屋,以识别有害生物问题。特别地,作为预防措施,较大的商业机构(例如酒店)可能希望监测有害生物。这使他们能够及早发现潜在的侵扰,从而减少根除虫害的费用。
4.根据房屋的大小,通常会安装多个检测设备。以前,必须对有害生物诱捕器进行人工检查以检查有害生物的存在。这需要至少一个用户定期检查房屋内的所有诱捕器,这很耗时。此外,即使是空的诱捕器也必须进行检查,因为没有办法知道诱捕器内是否存在有害生物。
5.因此,通常在有害生物诱捕器内使用监测设备,使得不需要检查很可能是空的诱捕器。然而,对有害生物诱捕器的持续监测可能是非常耗电的。这样,监测设备通常需要将有害生物诱捕器插入插座,以满足高功率要求。这意味着诱捕器不能放置在最适合捕捉有害生物的地方。
6.替代性地,一些设备可以是电池供电的。然而,高功率要求意味着必须定期更换电池。这导致终端用户的成本增加。
7.wo 2016/130182 a1披露了一种自动化昆虫监测系统,该系统包括外壳、外壳内的内部腔室和布置在外壳内以照亮内部腔室的底板表面的至少一部分的光源。
8.wo 2019/138242 a1披露了一种使用包括相机系统的联网检测系统来检测有害生物存在的系统。在该系统中,使用与目标有害生物相关联的参考数据来检测有害生物的存在。这可能非常耗电(例如需要高存储能力)。
技术实现要素:
9.根据本发明的第一方面,提供了一种有害生物监测设备,所述有害生物监测设备包括外壳、外壳内的表面;光学传感器,所述光学传感器被配置为生成与外壳内的内表面相关的光学数据;以及与所述光学传感器通信的处理器。
10.在一个实施例中,所述处理器被配置为:从所述光学传感器接收光学数据;选择与内表面的至少一个区段相关的光学数据,并将与所述至少一个区段相关的光学数据布置为多个像素或像素块。所述处理器可以通过以下方式进一步评估与至少一个区段相对应的光学数据是否满足与内表面相关联的预定条件:(1)对所述多个像素中指示光强度低于预定
强度值的像素的数量进行计数;(2)确定光强度低于所述预定强度限制的像素数量是否大于或等于预定像素阈值;以及(3)基于与所述至少一个区段相对应的光学数据是否满足与所述内表面相关联的预定条件,确定所述内表面上是否存在有害生物的迹象。合适地,所述内表面在其上包括用于固定有害生物的黏性或粘性物质。替代性地,所述表面包括陷阱诱捕器。
11.根据本发明的第二方面,提供了一种包括本文描述的设备的有害生物诱捕器。
12.根据本发明的第三方面,提供了一种用于提供有害生物监测设备的成套部件,所述成套部件包括:第一外壳,所述第一外壳具有用于在其上容纳有害生物的内表面;第二外壳,所述第二外壳具有用于在其上容纳有害生物的内表面;壳体,其中,所述壳体被配置为使得在使用中所述壳体可以可释放地耦接到所述第一外壳或所述第二外壳。
13.合适地,所述壳体容纳:光学传感器,所述光学传感器被配置为生成与所述第一外壳或所述第二外壳内的内表面相关的光学数据;以及与所述光学传感器通信的处理器,其中,所述处理器被配置为:从所述光学传感器接收光学数据;选择与所述第一外壳或所述第二外壳的内表面的至少一个区段相关的光学数据。
14.根据本发明的第四方面,提供了一种监测有害生物诱捕器的方法,所述方法包括:生成与外壳内的内表面相关的光学数据;选择与所述内表面的至少一个区段相关的光学数据,与所述至少一个区段相关的光学数据被布置为多个像素;通过以下方式评估与所述至少一个区段相对应的光学数据是否满足与所述外壳的内表面相关联的预定条件:对所述多个像素中指示光强度低于预定强度值的像素的数量进行计数;以及确定光强度低于预定强度限制的像素数量是否大于或等于预定像素阈值;以及基于与所述至少一个区段相对应的光学数据是否满足与所述内表面相关联的预定条件,确定在所述外壳内的内表面上是否存在有害生物的迹象。
15.适当地,本发明的第四方面的方法是使用本发明的第一方面的设备来执行的。
16.本发明的某些方面提供了这样的优点:与已知系统相比,有害生物监测设备具有较低的处理要求,因此降低了功耗。在某些方面,这允许增加有害生物监测设备的移动性,因为所述设备(由于功耗降低)不受市电连接或定期更换电池的限制。
附图说明
17.现在将在下文中参照附图仅通过示例的方式描述本发明的示例,在附图中:
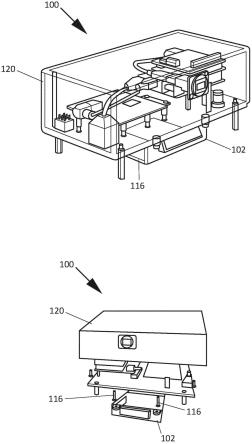
18.图1a和图1b展示了示例有害生物监测设备的平面图(透明图和分解图);
19.图2展示了示例有害生物监测设备的示意图;
20.图3a和图3b展示了使用中的示例有害生物监测设备的剖面图和平面图;
21.图4展示了监测有害生物诱捕器的示例方法的流程图;
22.图5展示了监测有害生物诱捕器的另一示例方法的流程图;
23.图6展示了监测有害生物诱捕器的另一示例方法的流程图;
24.图7展示了监测有害生物诱捕器的另一示例方法的流程图;
25.图7a展示了监测有害生物诱捕器的另一示例方法的流程图;
26.图8、图9a、图9b、图10a和图10b展示了有害生物监测设备的其他示例的平面图;以及
27.图11和图12分别展示了示例有害生物监测设备的平面图和侧视图(透明的)。
28.在附图中,相同的附图标记表示相同的部分。
29.本文使用的术语
‘
有害生物’用于描述讨厌的动物或昆虫。有害生物的示例可以包括(但不限于)啮齿动物、苍蝇、跳蚤、蟑螂和臭虫。
30.本文使用的术语
‘
外壳’是指具有基本封闭的内表面的容器。例如,外壳可以包括包围/限定它们之间的内表面(例如底座)的边界壁组件。
31.本文使用的术语
‘
表面的区段’或
‘
内表面的区段’是指表面的某个部分或区域。例如,表面的区段可以指朝向该表面的光学传感器的视场(或者多像素光学传感器的像素的视场)。
32.本文使用的术语
‘
块’指的是与表面或内表面相关的光学数据的离散化块或集合(子集),该光学数据是从指向表面或内表面的光学传感器接收的。例如,处理器可以被配置为将接收到的与表面相关的光学数据离散化为多个离散化块或集合,每个块包括与表面的单独区段相对应的光学数据,其中,与表面的区段相关的光学数据可以包括多个像素。
33.本文使用的术语
‘
与内表面相关联的预定条件’表示预定条件涉及表面本身的性质或状态,而不是其上的有害生物(或者更具体地,其上不存在有害生物的表面的预期性质或状态)。例如,预定条件可以涉及对于给定的环境光/施加光从表面反射的光的预期强度(例如,预定条件可以涉及低于预期光强度的像素数量)。
34.如本文所使用的,
‘
表面上存在有害生物的迹象’是由从对应的光学数据得出的有结论支持的有害生物存在的暗示/断言,而不是有害生物存在于内表面上的肯定结论。
35.本文使用的用于操作有害生物监测设备的
‘
监测部件’指的是用于检测有害生物监测设备内的有害生物的装置。例如,用于检测有害生物的装置可以包括有害生物监测设备的处理器、光学传感器、电源、led。
具体实施方式
36.根据本发明,在第一方面,提供了一种有害生物监测设备,该有害生物监测设备包括外壳、外壳内的表面;光学传感器,所述光学传感器被配置为生成与外壳内的内表面相关的光学数据;以及与所述光学传感器通信的处理器。
37.适当地,所述处理器被配置为将所述接收的光学数据离散化成多个离散化块,每个离散化块包括与所述内表面的单独区段相对应的光学数据。优选地,所述处理器进一步被配置为评估与所述内表面的多个区段相对应的光学数据是否满足预定条件。
38.在优选实施例中,所述处理器被配置为通过以下方式来确定在外壳内的内表面上是否存在有害生物的迹象:确定是否有其中每个区段都具有满足预定条件的对应光学数据的多个相邻区段;以及确定所述多个相邻区段是否包含大于或等于预定区段阈值的区段数量。
39.在另一个实施例中,所述设备包括被配置为向外部接收器传输信息的通信装置,其中,所述处理器被配置为在确定了有害生物的迹象时指示通信装置向外部接收器传输信息。
40.在优选实施例中,所述传输的信息包括与所述内表面的从中已经确定了有害生物的迹象的区段相对应的光学数据。光学数据可以包括被询问的表面的图像。
41.在另一个实施例中,所述处理器进一步被配置为指派与所述至少一个区段相对应的光学数据已经满足与所述内表面相关联的预定条件的指示。
42.在另一个实施例中,其中,所述处理器进一步被配置为仅在以下情况下才指派与所述至少一个区段对应的光学数据已经满足与所述内表面相关联的预定条件的指示:所述至少一个区段是其光学数据满足与所述内表面相关联的预定条件并且从中确定了在所述内表面上存在有害生物的迹象的多个相邻区段之一。
43.在又一个实施例中,所述处理器进一步被配置为从光学传感器接收另外的光学数据;选择所述内表面的至少一个区段,所述光学传感器已经为所述至少一个区段生成了被布置为多个像素的另外的光学数据;并且确定是否存在与所述至少一个区段相对应的光学数据先前已经满足与所述内表面相关联的预定条件的指示。这样,可以评估与内表面的至少一个区段相对应的另外的光学数据是否满足与内表面相关联的预定条件。在一个实施例中,仅当不存在与所述至少一个区段相对应的光学数据先前已经满足预定条件的指示时,才进行这样的评估。在评估完成之后,根据所述评估确定所述内表面是否存在有害生物的迹象。
44.在一个实施例中,所述光学数据包括光强度。
45.在另一个实施例中,所述设备进一步包括控制器,所述控制器被配置为在活动模式与待机模式之间切换所述设备。
46.在进一步的实施例中,光学传感器和处理器可释放地耦接到外壳。优选地,所述设备进一步包括壳体,其中,所述光学传感器和所述处理器至少部分地容纳在所述壳体内,其中,所述壳体可释放地耦接到所述外壳。
47.在优选实施例中,所述设备进一步包括作为电源的电池。
48.根据本发明的第二方面,提供了一种包括本文描述的设备的有害生物诱捕器。
49.根据本发明的第三方面,提供了一种用于提供本文描述的有害生物监测设备的成套部件。在一个实施例中,由套件中的处理器接收的光学数据与套件的第一外壳或第二外壳的内表面的至少一个区段相关,与所述至少一个区段相关被布置为多个像素;通过以下方式评估与所述至少一个区段相对应的光学数据是否满足与所述第一外壳或所述第二外壳的内表面相关联的预定条件:对所述多个像素中指示光强度低于预定强度值的像素的数量进行计数;以及确定光强度低于预定强度限制的像素数量是否大于或等于预定像素阈值;基于与所述至少一个区段相对应的光学数据是否满足与所述第一外壳或所述第二外壳的内表面相关联的预定条件,确定在所述第一外壳或所述第二外壳的内表面上是否存在有害生物的迹象。
50.根据本发明的第四方面,提供了一种监测有害生物诱捕器的方法。适当地,本发明的第四方面的方法是使用本发明的第一方面的设备来执行的。
51.在一个实施例中,所述方法包括将所述光学数据离散化成多个离散化块的步骤,每个离散化块包括与所述内表面的单独区段相对应的光学数据。
52.在另一个实施例中,评估与所述内表面的多个区段相对应的光学数据是否满足所述预定条件的步骤。
53.在另一个实施例中,根据所述评估确定在所述外壳内的内表面上是否存在有害生物的迹象的步骤包括:确定是否存在其中每个区段都具有满足所述预定条件的对应光学数
据的多个相邻区段;以及确定所述多个相邻区段是否包含大于或等于预定区段阈值的区段数量。
54.在优选实施例中,所述方法包括在确定了有害生物的迹象时向外部接收器传输信息的步骤。
55.另外,优选地,所述传输的信息包括与从中已经确定了有害生物的迹象的区段相对应的光学数据。最优选地,传输表面的图像。
56.在一个实施例中,所述方法还包括指派与所述至少一个区段相对应的光学数据已经满足所述预定条件的指示的步骤。
57.在另一个实施例中,仅在以下情况下才指派与所述至少一个区段相对应的光学数据已经满足所述预定条件的指示:所述至少一个区段是其光学数据都满足所述预定条件并且从中确定了在所述内表面上存在有害生物的迹象的多个相邻区段之一。
58.在另一个实施例中,所述方法包括以下步骤:生成与所述内表面相关的另外的光学数据;选择所述内表面的至少一个区段,已经为所述至少一个区段生成了另外的光学数据;确定是否存在与所述至少一个区段相对应的光学数据先前已经满足所述预定条件的指示;仅当不存在与所述至少一个区段相对应的光学数据先前已经满足预定条件的指示时,评估与所述内表面的至少一个区段相对应的另外的光学数据是否满足所述预定条件;以及根据所述评估确定在所述外壳内的内表面上是否存在有害生物的迹象。
59.在另一个实施例中,评估与内表面的至少一个区段相对应的另外的光学数据是否满足预定条件,并且仅当来自光学数据的指示表明满足预定条件的区段的数量大于先前已经满足预定条件的区段的数量时,才将光学信息传输到外部接收器。
60.在另一个实施例中,仅在以下情况下才指派与所述至少一个区段相对应的光学数据已经满足所述预定条件的指示:所述至少一个区段是其光学数据都满足所述预定条件并且从中确定了在所述内表面上存在有害生物的迹象的多个相邻区段之一。
61.图1a和图1b展示了根据本披露内容的有害生物监测设备100的示例。图2展示了示意性地展示的有害生物监测设备100。图3a和图3b展示了使用中的有害生物监测设备100。
62.有害生物监测设备100包括外壳102。内表面104被限定在外壳102内,用于在其上接收/容纳有害生物。一般而言,内表面104可以是容纳在外壳102内(即,位于外壳102的边界壁内)的任何表面。例如,内表面104可以形成外壳102的底座或壁的一部分(在该示例中,内表面104是外壳102的底座部分)。内表面104可以以任何合适的方式配置,例如内表面104可以是平坦的或弯曲的/倾斜的(比如陷阱)。
63.外壳102被配置为允许有害生物进入其中。这样,有害生物可以进入外壳102并接近内表面104。在该示例中,外壳102包括两个入口116,位于外壳102的相对侧,以允许有害生物从任一侧进入。入口116允许接近外壳102的内部,因此也允许接近内表面104。
64.入口116可以根据由有害生物监测设备100监测的有害生物的类型以任何合适的方式配置。一般而言,较宽的入口(例如基本横跨外壳102的宽度或长度)和朝向内表面104逐渐变细可以用来最大化进入的可能性。然而,也可以使用更窄的入口。从入口116到内表面104的路径可以以任何合适的方式配置。例如,从入口到内表面104的路径可以是平坦的或倾斜的(向上或向下朝向内表面104)。
65.如图3a和图3b最佳示出的,有害生物监测设备100进一步包括光学传感器106,其
被配置为生成与外壳102内的内表面104相关的光学数据。在该示例中,由光学传感器106生成的光学数据包括从内表面104向光学传感器反射的光强度。
66.在该示例中,光学传感器106包括朝向内表面104的相机布置。在该示例中,相机布置包括多像素相机,使得光学数据被布置为多个像素。
67.在该示例中,有害生物监测设备100进一步包括照明装置,该照明装置被配置为照亮内表面104并辅助生成光学数据。在该示例中,照明装置是led 108。led 108可以被配置为生成白光或特定波长(例如530nm)的光。然而,在其他示例中,有害生物监测设备100可以仅依赖环境光。
68.在该示例中(如图3a和图3b中最佳示出的),内表面104在其上包括用于固定有害生物的黏性或粘性物质或基板110(例如黏性垫或胶合板)。在一个实施例中,出于包装和运输的目的,基板110的粘合剂层可以被离型纸覆盖。离型纸在使用前被移除以暴露粘合剂层,因此有害生物可以接触粘合剂层并被诱捕。在另一个实施例中,粘性基板110(黏性垫或胶合板)是一次性的。在该实施例中,定期更换一次性胶合板,以确保有害生物监测设备100的持续功效,并处理掉固定在其上的有害生物。涂覆有粘性物质或粘合剂的基板110可以包括例如粘合剂或粘合剂组合物,其是压敏粘合剂,包括水基树脂或热熔粘合剂。在一些实施例中,例如,粘合剂是丙烯酸聚合物、丁基橡胶、天然橡胶、腈、硅酮、苯乙烯嵌段共聚物、苯乙烯-乙烯/丙烯、苯乙烯-异戊二烯-苯乙烯和/或乙烯基醚粘合剂或其混合物。
69.在另一个实施例中,内表面104包括陷阱诱捕器(未示出),以代替或补充基板110来捕捉有害生物。陷阱诱捕器的基本部件是其内壁不能被有害生物攀爬的容器或坑。例如,落入诱捕器的有害生物将无法逃脱,因为它无法爬上内壁。
70.在该示例中,基板110(和/或陷阱)位于光学传感器106的视场111中,以将有害生物固定在合适的位置。
71.有害生物监测设备100进一步包括与光学传感器106通信的处理器112。处理器被配置为从光学传感器106接收光学数据。
72.在该示例中,有害生物监测设备100包括电源114。在该示例中,为所有受电部件(例如,处理器112、光学传感器106、led 108)提供单个电源。在该示例中,电源是电池(例如,aa电池),其消除了有害生物监测设备100对市电的依赖。因此,有害生物监测设备100可以被放置在最合适的区域来捕捉有害生物,而不是仅仅被放置在接入市电的位置。
73.在该示例中,用于操作有害生物监测设备100的
‘
监测部件’(例如光学传感器106、led 108、处理器112、电源114)至少部分地位于/容纳在壳体120内,与外壳102分离但耦接。如图3a中最佳示出的,壳体120包括间隙或窗口128,其被配置为允许接近外壳102(例如,光学传感器106和led 108可以通过窗口128观察内表面104)。
74.如图4所示,在有害生物监测设备100的一般使用中,光学传感器106生成与内表面相关的光学数据(步骤1000)。光学数据被传递到处理器112(步骤1002),该处理器然后分析数据(步骤1004)以根据光学数据确定在内表面104上是否存在有害生物的迹象(步骤1006)。
75.图5展示了使用有害生物监测设备100监测有害生物的方法。光学传感器106生成与内表面相关的光学数据(步骤2000)。将光学数据传递到处理器112(步骤2002),该处理器选择与内表面的区段相关的光学数据(步骤2003)。在该示例中,与该区段相关的光学数据
包括多个像素。处理器112分析与该区段相关的光学数据(步骤2004),然后根据该分析确定在内表面上是否存在有害生物的迹象(步骤2006)。
76.在一些示例中,处理器112可以基于与多于一个区段相对应的光学数据是否满足与内表面相关联的预定条件来确定在外壳内的内表面上是否存在有害生物的迹象。也就是说,在对第一个区段的光学数据进行分析之后,处理器112可以选择与另一个区段相关的光学数据进行分析。在确定内表面上有害生物的可能性或迹象之前(如箭头2100所示),可以重复该过程(例如,直到已经分析了与光学数据集/图像中的所有区段相关的光学数据)。
77.在该示例中,处理器112分析光学数据以评估与该区段(或依次每个区段)相对应的光学数据是否满足与内表面相关联的预定条件。
78.在该示例中,预定条件一般涉及当不存在有害生物时从表面反射的预期光强度。反射光可以是环境光或来自led 108的光(参见例如从led 108延伸到表面110的光,如图11的阴影棱锥或图12的阴影三角形所示)。在该示例中,处理器通过对
‘
暗’像素(即,比内表面的预期像素更暗的像素)进行计数来评估是否满足预定条件。
79.具体而言,处理器112首先对多个像素中指示光强度低于预定强度值(即,与不存在有害生物存在时的预期强度值相对应的强度值)的像素的数量进行计数。例如全强度的约10%。
80.其次,处理器112确定光强度低于预定强度限制的像素数量是否大于或等于预定像素阈值。例如,相应块中像素总数的约80%。
81.在另一个实施例中,相对于不存在有害生物存在时从表面反射的预期光强度,处理器通过对
‘
亮’像素(即,比内表面的预期像素更亮的像素)进行计数来评估是否满足预定条件,以适应具有亮或反射性表面的有害生物。
82.在该实施例中,处理器112首先对多个像素中指示光强度高于预定强度值(即,与不存在有害生物存在时的预期强度值相对应的强度值)的像素的数量进行计数。例如全强度的约90%。
83.其次,对于替代实施例,处理器112确定光强度高于预定强度限制的像素的数量是否大于或等于预定像素阈值。例如,相应块中像素总数的约20%。
84.基于与该区段相对应的光学数据是否满足与内表面相关联的预定条件,处理器112确定在内表面上是否存在有害生物的迹象(步骤2006)。虽然下面的描述是根据光强度低于预定强度的预定条件提供的,但是应理解,可以详细描述类似的步骤以应用于上述替代实施例(即,光强度高于预定强度)。
85.在一般意义上,如果与区段相关的光学数据已经满足预定条件,则处理器112可以确定存在有害生物的迹象(相反,如果没有满足预定条件,则处理器可以确定不存在有害生物的迹象)。然而,在该示例中,处理器112通过以下方式确定内表面上是否存在有害生物的迹象:首先,确定是否存在其中每个区段都具有满足预定条件的对应光学数据的多个相邻区段;然后确定多个相邻区段是否包含大于或等于预定区段阈值的区段数量。应理解,用于确定是否存在有害生物的迹象的合适的块阈值可以取决于光学传感器的分辨率(即像素的大小)、视场和被监测的有害生物。例如,对于较小的有害生物,块阈值可以是约4个块,对于较大的有害生物,块阈值可以是约20个块。
86.可以周期性地重复数据生成、分析和确定的过程,以检查是否有另外的有害生物
到来(见箭头2200)。
87.图6展示了图5的方法的示例实施方式。最初,打开有害生物监测设备100(步骤1),并且有害生物进入外壳102。生成光学数据(步骤2000),通过检测(多个)
‘
暗’区段,有害生物监测设备根据该光学数据确定内表面上存在有害生物的迹象(步骤2006,中间步骤2004未示出)。
88.在该示例中,一旦确定在内表面上存在有害生物的迹象,那么将关于有害生物的迹象的信息传输到外部接收器126(步骤2009)。在该示例中,有害生物监测设备100包括通信装置124,其被配置为向外部接收器126传输信息。处理器112被配置为在确定了有害生物的迹象时指示通信装置124向外部接收器126传输信息。
89.外部接收器126可以被配置为显示数据以供用户视觉检查。外部接收器126可以是连接到多个有害生物监测设备100的中央接收集线器。
90.传输的信息可以包括与从中已经确定了有害生物的迹象的区段相对应的光学数据。在其他示例中,传输的信息可以包括所有光学数据(即,内表面的图像)。
91.可以使用任何合适的通信装置。例如,通信装置可以被配置为经由wifi、蓝牙等传输信息。在该示例中,通信装置包括zigbee通信集线器。
92.周期性地重复该过程以检查是否有另外的有害生物到来(见箭头2200)。
93.图7展示了使用有害生物监测设备100监测有害生物的方法,其大致对应于图5。为了简洁,对应步骤的一些细节将不再重复。
94.在该示例中,有害生物监测设备100具有休眠或待机模式,以帮助最小化功耗,以实现更好的监测操作。也就是说,有害生物监测设备100被配置为仅间歇地监测有害生物,以保持电池寿命。在该示例中,所述设备进一步包括控制器122,其被配置为在活动模式(用于监测操作)与待机模式之间切换有害生物监测设备100。
95.处理器112被配置为周期性地指示控制器122
‘
唤醒’有害生物监测设备100(图7的步骤2999或图7a的步骤3999)——也就是说,将有害生物监测设备100从待机模式切换到活动模式。监测操作之间的周期可以取决于被监测的有害生物(例如,更活跃的有害生物可能需要更频繁的监测)和/或有害生物监测设备100的电池寿命(例如,具有更长电池寿命的设备可以允许更频繁的监测,或者当电池内的电荷耗尽时可以使用不太频繁的监测)。
96.光学传感器106生成与内表面相关的光学数据(步骤3000)。在该示例中,处理器被配置为将接收的光学数据离散化成多个离散化块或集合(步骤3001),每个块包括与内表面的单独区段相对应的光学数据。可以根据被监测的有害生物来选择块的数量(例如,较大的块可以用于较大的有害生物)。
97.一般而言,内表面的分析来自于对所有数据块的分析(但一些数据块,例如与包括拐角或另一冗余特征的表面区段相关的数据块,可能被忽略)。在光学数据的离散化之后,选择光学数据块(步骤3003)。步骤3003至3009可以如例如在下面的实施例1和实施例2中描述的那样执行。
98.实施例1
99.如同在图7中进一步详细描述的图5的方法,处理器112通过以下方式来评估是否满足预定条件:对多个像素中指示光强度低于预定强度值的像素的数量进行计数(步骤30041),并确定光强度低于预定强度限制的像素的数量是否大于或等于预定像素阈值(步
骤30042)。
100.在该示例中,如果满足预定条件,则处理器进一步被配置为向块指派已经满足预定条件的指示。在该示例中,通过在分析矩阵内将块标记为set来指派指示(步骤3005)。
101.从步骤3003开始重复所述方法以处理所有要分析的块,并且已经编译了对应的分析矩阵。当已经分析了所有的块时,处理器112根据所述分析,从分析矩阵的内容确定在内表面上是否存在有害生物的迹象(步骤3006)。如上所述,分析矩阵中的每个块与来自已经被光学传感器(106)询问的表面(104)的特定区段的光学数据相对应。因此,来自表面(104)的相邻或邻近区段的光学数据与分析矩阵中结合在一起的相邻或邻近块相对应。
102.在该示例中(以与图5的方法类似的方式),在确定有害生物的可能性或指示时,考虑:
103.(1)识别数量“(x1)”,它是分析矩阵中(i)既被标记为set(即,来自步骤3005)(ii)又在分析矩阵内与一个或多个其他set块邻近/结合在一起的块的数量;以及
104.(2)将(x1)与预定块阈值“(b)”(即,也称为块阈值数)进行比较(见步骤3006)。例如,对于较小的有害生物,块阈值(b)可以是结合在一起的约4个set块。对于较大的有害生物,块阈值(b)可以是结合在一起的约20个set块。
105.如果确定在内表面上不存在有害生物的迹象(即(x1)≤(b)),则清除分析矩阵以用于将来的监测操作(步骤3008)。
106.如果确定在内表面(104)上存在有害生物的迹象(即(x1)≥(b)),则将与这样的表面相关联的光学数据/图像传输到外部接收器126(步骤3009)。在传输之后(或者替代性地,在传输之前/同时),用于识别(x1)的块(即,那些(i)既被标记为set(步骤3005)(ii)又在分析矩阵内与一个或多个其他set块邻近/结合在一起的块)被添加到
‘
忽略列表’。也就是说,在该示例中,仅在一个区段是从中确定了在内表面上存在有害生物的迹象的多个相邻区段之一时,才为该区段保持满足预定条件的指示。换句话说,处理器被配置为指派(通过
‘
忽略列表’)特定块(其与从特定区段接收的光学数据相关)有助于确定内表面上存在有害生物的迹象的指示。分析矩阵然后被清除用于将来的监测操作(步骤3008)。
107.在该示例中,有害生物监测设备100然后被设置到休眠状态,并且重复上述过程。
108.在进一步的监测操作中,一旦选择了新的块,处理器就确定是否存在该块先前已经满足预定条件的指示(即,该块是否存在于忽略列表中——步骤3007)。如果是,则忽略这个块,并且处理器试图选择另一个块。如果否,则监测操作继续到步骤3004
1,2
等。
109.该块先前已经满足预定条件的指示可以最终用于避免在所述方法的进一步迭代期间对该块进行分析,从而降低功耗。也就是说,处理器可以只分析与尚未确定有害生物的迹象的块相关的光学数据。当有害生物在内表面上缓慢移动或保持基本静止时,例如由于被固定在黏性或粘性物质上,这是特别有用的。
110.实施例2
111.如同在图7a中进一步详细描述的图5的方法,处理器112通过以下方式来评估是否满足预定条件:对多个像素中指示光强度低于预定强度值的像素的数量进行计数(步骤40041),并确定光强度低于预定强度限制的像素的数量是否大于或等于预定像素阈值(步骤40042)。此外,使用经典的边缘检测算法来提高系统的鲁棒性。因此,对邻近像素之间的强度差进行评估,并且如果变化足够大,那么它被认为是边缘。在图像块的每一行中(例如,
参见图表4020中所示的图示),仅对在序列中不仅低于预定强度限制而且在其左(l)端由向下的边缘界定(因此是足够尖锐的从亮到暗的过渡)且在其右(r)端由向上的边缘界定(因此是足够尖锐的从暗到亮的过渡)的那些像素(4025)进行计数。
112.在该实施例中,使用差值限制来确定强度变化是否大到足以构成边缘。
113.强度限制由以下等式确定:
114.强度限制=(该块中的最小强度)+强度比*(该块中的最大强度)-(该块中的最小强度)
115.差值限制由以下等式确定:
116.差值限制=差值比*(该块中的最大强度)-(该块中的最小强度)
117.在该示例中,如果满足预定条件,则处理器进一步被配置为向块指派已经满足预定条件的指示。在该示例中,通过在分析矩阵内将块标记为set来指派指示(步骤4005)。
118.从步骤4003开始重复所述方法以处理所有要分析的块,并且已经编译了对应的分析矩阵。当已经分析了所有的块时,处理器112根据所述分析,从分析矩阵的内容确定在内表面上是否存在有害生物的迹象(步骤4006)。如上所述,分析矩阵中的每个块与来自已经被光学传感器(106)询问的表面(104)的特定区段的光学数据相对应。因此,来自表面(104)的相邻或邻近区段的光学数据与分析矩阵中结合在一起的相邻或邻近块相对应。
119.在该示例中(以与图5的方法类似的方式),在确定有害生物的可能性或指示时,考虑:
120.(1)识别数量“(x1)”,它是分析矩阵中(i)既被标记为set(即,来自步骤4005)(ii)又在分析矩阵内与一个或多个其他set块邻近/结合在一起的块的数量;以及
121.(2)将(x1)与预定块阈值“(b)”(即,也称为块阈值数)进行比较(见步骤4006)。例如,对于较小的有害生物,块阈值(b)可以是结合在一起的约4个set块。对于较大的有害生物,块阈值(b)可以是结合在一起的约20个set块。
122.如果确定在内表面上不存在有害生物的迹象(即(x1)≤(b)),则清除分析矩阵以用于将来的监测操作(步骤4008)。
123.如果确定在内表面(104)上存在有害生物的迹象(即(x1)≥(b)),则将与这样的表面相关联的光学数据/图像传输到外部接收器126(步骤4009)。在传输之后(或者替代性地,在传输之前/同时),用于识别(x1)的块(即,那些(i)既被标记为set(步骤4005)(ii)又在分析矩阵内与一个或多个其他set块邻近/结合在一起的块)被添加到
‘
忽略列表’。也就是说,在该示例中,仅在一个区段是从中确定了在内表面上存在有害生物的迹象的多个相邻区段之一时,才为该区段保持满足预定条件的指示。换句话说,处理器被配置为指派(通过
‘
忽略列表’)特定块(其与从特定区段接收的光学数据相关)有助于确定内表面上存在有害生物的迹象的指示。分析矩阵然后被清除用于将来的监测操作(步骤4008)。
124.在该示例中,有害生物监测设备100然后被设置到休眠状态,并且重复上述过程。
125.在进一步的监测操作中,一旦选择了新的块,处理器就确定是否存在该块先前已经满足预定条件的指示(即,该块是否存在于忽略列表中——步骤4007)。如果是,则忽略这个块,并且处理器试图选择另一个块。如果否,则监测操作继续到步骤4004
1,2
等。
126.该块先前已经满足预定条件的指示可以最终用于避免在所述方法的进一步迭代期间对该块进行分析,从而降低功耗。也就是说,处理器可以只分析与尚未确定有害生物的
迹象的块相关的光学数据。当有害生物在内表面上缓慢移动或保持基本静止时,例如由于被固定在黏性或粘性物质上,这是特别有用的。
127.实施例3
128.在替代实施例中,遵循如实施例1和实施例2(以上)所示的图7的步骤(3003)至(3009)或图7a的步骤(4003)至(4009),但是没有
‘
忽略列表’。更具体地,处理器112被配置为既存储(x1)的数值又增加有害生物实例阈值(y),而不是将用于识别(x1)的特定块添加到
‘
忽略列表’。例如,在实施例1中的步骤(3003)至(3009)(即,其中(x1)≥(b))或实施例2的步骤(4003)至(4009)之后检测到第一个有害生物时,有害生物实例阈值(y)将从零(不存在有害生物)增加到一(存在一个有害生物)。
129.在该示例中,随后的监测操作将(x2)识别为是分析矩阵中的set的邻近块的数量(即,其中(x2)≥(b)),并且还识别(x2)基本等于(x1)(来自先前监测操作的set块的数量)。即使这样的(x2)个块对应于表面(104)的与先前监测操作的区段处于不同位置的相邻或邻近区段,也仍然指示有一个有害生物的存在,因为在这种情况下,有害生物确定是基于邻近set块的总数,而不一定与它们的位置相关。因此,即使有害生物已经移动到表面(104)上的不同位置,有害生物实例阈值(y)也将保持不变(即,存在一个有害生物)。因此,不需要将与这样的表面相关联的光学数据/图像重新传输到外部接收器126(步骤3009)/(步骤4009)。
130.实施例3的动态有害生物实例阈值方法在有害生物在内表面上移动或不保持基本静止时特别有用,例如,由于被诱捕在陷阱中或由于移动到表面上的不同位置。
131.在一个实施例中,如果与内表面的至少一个区段相对应的另外的光学数据满足预定条件,比如块阈值数,则进行实施例3中的有害生物评估。仅当来自光学数据的指示表明满足预定条件的区段的数量(例如,(x2))大于先前已经满足预定条件的区段的数量(例如,(x1))时,才将光学信息传输到外部接收器。
132.优势
133.上述实施例提供了这样的优点:有害生物监测设备以比先前已知的设备更简单和更省电的方式监测有害生物。
134.例如,光学数据的评估使用预定条件,与已知的评估方法(比如基于先前生成的光学数据的评估)相比,这有助于减少所需内存和相关联的功耗。此外,预定条件与内表面相关联(而不是与目标有害生物相关联,例如,与目标有害生物相关联的这种方式由于存储有害生物相关数据而更加复杂且占用大量内存)。
135.一般而言,预定条件涉及光强度低于预定强度值的像素计数,而不是其他系统中使用的更复杂的图像处理技术(例如,哈尔级联、内核滤波、图像描述符方法和特征变换)。因此,采用了一种更简单的方法,即大量的图像处理,其更省电。
136.修改
137.对上述详细设计的各种修改是可能的。例如,上面讨论的(多个)有害生物监测设备可以形成用于捕捉有害生物的有害生物诱捕器的一部分(作为只是监测有害生物的补充)。
138.在一些示例中,处理器可以在分析之前对光学数据进行预处理。例如,处理器可以移除与表面的冗余区域(例如拐角)相对应的光学数据块(或者添加到忽略列表中)。
139.应理解,有害生物监测设备的结构和配置可以与上述不同。图8至图10b展示了有
害生物监测设备100的变体。
140.例如,有害生物监测设备的外壳可以具有以任何合适的方式配置的任何合适数量的入口。作为说明性实施例,图8展示了有害生物监测设备200,其包括具有三个入口216
1-3
的外壳202。在该示例中,入口都具有不同的配置。具体地,外壳202包括平坦的入口2161和倾斜的入口2162(即,从地面向内表面向上倾斜)。外壳202进一步包括被覆盖的槽入口,或陷阱诱捕器入口2163,其高于内表面,使得一旦有害生物已经通过诱捕器入口2163,有害生物可以被捕捉在外壳内(或至少被阻止通过同一入口离开)。其他示例可以包括一个或多个任何所示的入口类型。
141.电池可以放置在任何合适的位置。作为示例,图9a和图9b分别展示了有害生物监测设备300和400。在有害生物监测设备300中,电池314位于有害生物监测设备的上部(例如在壳体内,与
‘
监测部件’相邻)。在有害生物监测设备400中,电池414位于有害生物监测设备的下部(例如在包括内表面的外壳内或相邻位置)。结果,有害生物监测设备400相对于有害生物监测设备300具有较低的轮廓。
142.根据被监测的有害生物和/或打算使用该装置的空间,有害生物监测设备可以是任何合适的尺寸/轮廓。图10a和图10b分别展示了不同尺寸和轮廓的有害生物监测设备500和600。与前面的示例相比,有害生物监测设备500具有较小的占地面积(例如用于监测较小的有害生物)。有害生物监测设备600具有窄的轮廓(例如用于放置在狭窄的空间中)。
143.在其他实施例中,有害生物监测设备100可以包括信息素、化学引诱剂(co2)或被有害生物发现有吸引力的其他有气味的材料。
144.在一些示例中,在内表面上可以没有用于固定有害生物的黏性或粘性物质。在这样的示例中,有害生物可以在监测操作之间移动。
145.在一些示例中,反射光数据可以由光学传感器经由位于外壳/壳体内的反射镜接收。也就是说,反射镜可以被定位成将来自内表面的光朝向光学传感器反射。同样地,光学传感器不必位于内表面附近或正上方。这为在有害生物监测设备内放置部件提供了灵活性。
146.在上述示例中,监测部件位于与外壳分离的壳体内。然而,在其他示例中,外壳可以容纳在壳体内,或者与壳体成一体。
147.在一些示例中,监测部件可以可释放地耦接到外壳。在一些示例中,这是(容纳监测部件的)壳体可释放地耦接到外壳的结果。这使得监测部件可以
‘
模块化’地与单独的外壳一起使用。也就是说,监测部件可以作为具有一个或多个外壳的模块化系统的一部分来提供。然后,根据布置的预期用途(例如,要检测的有害生物和/或有害生物监测设备的预期位置),监测部件可以与一个或多个外壳中的任何一个一起使用。
148.换句话说,成套部件可以包括两个或更多个外壳,每个外壳具有用于在其上容纳有害生物的内表面和上述壳体(或用于检测外壳内表面上的有害生物的简单装置)。壳体被配置为使得在使用中壳体可以可释放地耦接到任何/每个外壳。例如,成套部件可以包括第一外壳和第二外壳,第一外壳的尺寸和构造适于监测/捕捉第一尺寸的有害生物(例如蟑螂),并且第二外壳的尺寸和构造适于监测/捕捉第二尺寸的有害生物(例如臭虫)。例如,当监测较大的有害生物时,可能需要较大的外壳(即,光学传感器可能需要远离内表面)。
149.对于本领域技术人员而言很清楚的是,关于上述任何实施例描述的特征可以在不
同的实施例之间互换应用。例如,图4至图7的流程图中呈现的方法步骤可以以任何合适的方式组合或互换使用。上述实施例是说明本发明各种特征的示例。
150.在本文件的整个说明书和权利要求书中,词语“包括”和“包含”及其变体意指“包括但不限于”,并且它们不旨在(且没有)排除其他的部分、添加剂、部件、整数或步骤。在本文件的整个说明书和权利要求书中,单数涵盖复数,除非上下文另外要求。特别地,在使用不定冠词的情况下,本文件应理解为考虑复数以及单数,除非上下文另外要求。
151.结合本发明的一个特定的方面、实施例或实例描述的特征、整数、特性、化合物、化学部分或基团应理解为可应用到本文描述的任何其他的方面、实施例或实例,除非与之不兼容。在本文件(包括任何所附权利要求、摘要和附图)中披露的所有特征、和/或如此披露的任何方法或过程的所有步骤可以以任何组合方式进行组合,除了此类特征和/或步骤中的至少一些是互斥的组合之外。本发明不限于任何前述实施例的细节。本发明扩展到本文件(包括任何所附权利要求、摘要和附图)中披露的特征中的任何新颖的特征或任何新颖的组合,或扩展到如此披露的任何方法或过程中的步骤中的任何新颖的步骤或任何新颖的组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1