机器人挤奶装置的制作方法
机器人挤奶装置
1.本发明涉及一种用于对具有前乳头和后乳头的乳畜进行全自动挤奶的机器人挤奶装置,该机器人挤奶装置包括:挤奶工具,该挤奶工具具有至少多个乳头杯;机器人臂,该机器人臂用于移动乳头杯并将这些乳头杯连接到乳头,并且为每个乳头杯设置一个乳头杯固持件,用于使乳头杯以乳头杯搁置状态可释放地放置在乳头杯固持件上;乳头位置确定装置,该乳头位置确定装置用于确定乳畜的乳头的乳头位置;以及控制装置,该控制装置用于控制机器人挤奶装置并且基于所确定的乳头位置来移动机器人臂,其中,控制装置被配置成在挤奶期间使机器人臂移动到搁置位置,并且还被配置成检测指示没有乳头杯附接到或者将附接到至少一个前乳头的杯分离信号。
2.这样的机器人挤奶装置或挤奶机器人现在是公知的,并且可以完全独立地对一群乳畜(比如奶牛)进行挤奶。大体上,已知两种系统,一种系统是在各自情况中具有夹持器的机器人臂从料盒中取出乳头杯以将该乳头杯连接到乳头;以及诸如lely挤奶机器人的系统,在这种系统中,机器人臂同时承载所有乳头杯并且将这些乳头杯从机器人臂自身连接到乳头。本发明涉及后一种类型的机器人挤奶装置。
3.机器人挤奶装置自身具有的优点是:原则上机器人臂可以保持在乳头杯下方,但是比单独连接的机器人臂更靠近乳头杯。因此,乳头杯掉落到地面上并被弄脏的可能性要小得多。尽管如此,在实践中似乎是乳头自身可能被弄脏,由此例如甚至发炎,这当然是不期望的。
4.本发明的目的是提供一种在引言中所引用类型的机器人挤奶装置,其中在任何情况下都减轻了上述缺点。
5.本发明利用根据权利要求1的机器人挤奶装置、特别是用于对具有前乳头和后乳头的乳畜进行全自动挤奶的机器人挤奶装置实现了所述目的,该机器人挤奶装置包括:挤奶工具,该挤奶工具具有至少多个乳头杯;机器人臂,该机器人臂用于移动乳头杯并将这些乳头杯连接到乳头,并且为每个乳头杯设置有一个乳头杯固持件,用于使乳头杯以乳头杯搁置状态可释放地放置在乳头杯固持件上;乳头位置确定装置,该乳头位置确定装置用于确定乳畜的乳头的乳头位置;以及控制装置,该控制装置用于控制机器人挤奶装置并且基于所确定的乳头位置来移动机器人臂,其中,控制装置被配置成在挤奶期间使机器人臂移动到搁置位置,并且还被配置成检测指示不再有或者将没有乳头杯附接到至少一个前乳头的杯分离信号,其中,控制装置还被配置成根据所述杯分离信号而适配所述搁置位置。
6.研究表明,在乳畜意外移动期间,最靠近机器人臂的乳头(通常是前乳头)可能会与机器人臂或至少其突出部分接触。作为机器人挤奶装置的一部分的机器人臂位于有乳畜的挤奶室中,并且因此位于较脏环境中。从而粪便或其他污物可能会沉积在机器人臂上。因此,通常在放置在机器人臂上的乳头位置确定装置上方设置保护盖。但是,该盖于是会捕获污物或粪便,并且至少部分地突出超过乳头位置确定装置并处于机器人臂上相对较高的位置。因此,乳头通常是与该盖接触。在已知的机器人挤奶装置中,机器人臂保持靠近乳头杯,以便能够快速地捕捉到这些乳头杯。还已知一种形式,其中机器人臂在连接之后立即与乳头间隔开放置,但是这同样具有缺点:挤奶管线和乳头杯的收回元件于是处于增加的张力
下,并且乳畜的移动自由度受到限制,从而由于意外移动而机器人臂无法跟随,导致乳头杯有更大的可能性被拉倒。根据本发明,已经发现了这两种形式之间的最佳方案,其中,在挤奶期间,在机器人臂靠近乳头杯的情况下,使机器人臂保持在有利于挤奶的搁置位置,并且没有或仅有轻微的张力施加到乳头杯和收回元件,乳畜有很大的移动自由度,同时使得能够实现如果检测到指示乳头杯已经与前乳头分离或者乳头杯已经开始与前乳头脱离联接因而将很快分离的杯分离信号,则适配搁置位置。由于前乳头是自由的,或者将很快变得自由,所以存在乳畜的意外移动将导致暴露的乳头与机器人臂的一部分接触的可能性。因此,如果机器人臂处于更远的距离处,则更好且更卫生。诚然,其他挤奶管线和收回元件上的张力将增加,但是这仅针对相对小的挤奶部分。
7.重要的是,应注意:机器人臂的搁置位置是在乳头挤奶期间采取的位置,而不是在乳头杯连接期间的位置。很明显,在连接期间,机器人臂通常必须更靠近乳头,特别是在后乳头连接期间更靠近前乳头。这不仅是很难避免或不可能避免的,而且另外与挤奶后不久接触污物相比,对(前)乳头的危害更小。毕竟,乳头孔尚未关闭,因此可能接触到乳头的污物可能会更容易地进入乳头。
8.在此还注意到,在一些其他文件中,描述了一种位于乳头杯的中间并且仅能够在其自身旋转之后检测乳头的乳头检测系统。这在实践中似乎行不通,因为旋转系统对于乳头检测系统是必需的,这进而需要对乳头检测系统进行角度校准,另外,乳头杯之间用来为具有保护盖的这种乳头检测系统提供地方的空间很小。因此,这种从未建造的机器人挤奶装置在本发明的范围之外。
9.杯分离信号是乳头杯已经分离的信号,即乳头杯不再附接或不再正确地附接到乳头。这种信号例如通过检测突然真空损失而生成,如本身已知的。加速度传感器等也可以检测分离。另外,可能是乳头杯连接不正确,比如连接到乳房上或对折的乳头上,由此无法正确地建立挤奶真空。挤奶真空不满足预定标准的信号于是应被认为是杯分离信号,因为乳头杯自发脱离或被主动移除以便重新连接的可能性增加。另外,杯分离信号包含机器人挤奶装置将例如通过脱离挤奶真空或主动将乳头杯从乳头收回而终止对乳头进行挤奶的信号。在任何情况中,乳头杯将在可预见的时间内与乳头分离,使得根据本发明的机器人臂现在能够预防性地被带到适配后的搁置位置。然后,可以将杯分离信号与来自相关乳头的奶流满足脱离联接标准的信号进行比较,根据该脱离联接标准,控制系统将开始针对该乳头杯的对应的脱离联接方案。
10.在从属权利要求和说明书引言的下一部分中描述了特定实施例。
11.在一些实施例中,控制装置被配置用于在挤奶期间并且在没有杯分离信号的情况下将所述搁置位置设置为中性位置,其中,具有所述乳头杯固持件的机器人臂位于所述乳头下方之下,特别是居中地位于所述乳头之下。尽管可以保持机器人臂例如尽可能远离乳头或连接的乳头杯,但是同时要降低挤奶软管和收回元件上的张力,并且为了乳畜的最大可能的移动自由度,有利的是,机器人臂具有在所述乳头下方、特别是居中地在所述乳头下方的搁置状态。在存在杯分离信号时,控制系统然后可以将机器人臂从中性位置移动到另一位置,特别是进一步远离(前)乳头。
12.在一些实施例中,控制装置被配置用于在挤奶循环期间还根据是否对所有前乳头进行挤奶来设置所述搁置位置。有时可能发生在挤奶期间不是所有(前)乳头都被挤奶。例
如,在前一次挤奶过程中,一个或多个后乳头以及在适用情况下一个前乳头可能已经中断挤奶。在随后的挤奶过程中,于是可以只对没有被挤奶或没有被充分挤奶的乳头进行挤奶,而不对充分挤奶的乳头进行挤奶。后者实施例在任何情况下都只在相关的乳头上施加负载。在这样的情况下,因此存在在挤奶期间未被充分挤奶的一个或多个前乳头。在根据本发明的这种情况下,即使从挤奶开始,也可以根据与前乳头的距离适配搁置位置。这实际上类似于已知的机器人挤奶装置,但是在后者中,搁置状态总是相对于乳头的中间移位一定距离,并且由此在大多数情况下,在前乳头前方存在张力增加和移动自由度减小的上述缺点。在本发明的这些实施例的情况中,此缺点仅在不是所有可用的(前)乳头都被挤奶的非常罕见的情况下发生。
13.在一些实施例中,控制装置被配置用于增加机器人臂与没有乳头杯的特别是最前面的前乳头之间沿乳畜的纵向方向的水平距离,更特别地,至少增加到预定阈值距离。机器人臂与前乳头(当然特别是最前面的前乳头)之间的距离可以通过使机器人臂移动远离前乳头而增加。这可以以多种不同的方式实现,但是有利地,机器人臂通过控制装置在水平纵向方向上向前移动,这产生的优点是机器人臂不会太低而靠近地面,并且仍可以最佳地捕获要发生分离的现在连接的乳头杯,因此乳头杯掉落到地面上的风险较小。侧向移动也是可能的,但是具有如下缺点:乳畜的大部分意外移动将沿纵向方向,并且侧向移动仅在大于机器人臂的相关部分(特别是在乳头位置确定装置上方的保护盖)的宽度的一半时才相关。
14.阈值距离可以是基于实际测量值,比如10cm等。如果需要,阈值距离可以取决于动物。大型黑白花奶牛将比小型泽西奶牛需要更大的距离等等。此外,通常还未完全长大的幼年奶牛一方面可能比同一品种的完全长大的奶牛相应地更小,但另一方面在挤奶棚中将具有更大的移动自由度。
15.在特定实施例中,机器人挤奶装置还包括动物位置确定装置,动物位置确定装置用于将乳畜的位置确定为乳畜的特征动物部位的位置,而不是乳头位置,其中,控制系统包括关于乳头相对于所述特征点的位置的信息并且被配置用于根据所确定的动物位置来适配搁置位置。原则上,可以基于所确定的乳头位置来选择机器人臂的搁置位置,以便能够连接乳头杯。然而,由于乳畜自身也可以移动,因此确定动物位置会是有用的,例如使用动物位置确定装置来确定动物上的特征点的位置。特征点给出乳畜的位置的直接或间接指示,并且通常是臀部或突出的髋骨,而不是乳头。通过确定该特征点的位置,控制装置可以部分地还基于关于乳头相对于该特征点的位置的已知信息来确定乳头所处的位置并相应地设置搁置位置。这样的信息通常存在于控制装置的存储器中,因此这通常在乳头杯连接过程的第一部分期间使用,在该第一部分中,臂必须确定位置以便移动到乳畜下方。
16.动物位置确定装置可以选自本身已知的许多装置,比如机械探头、超声波传感器或光学相机。有利地,该装置包括3d相机,比如特别是飞行时间相机,其可以一次产生例如乳畜的臀部的空间图像。控制系统可以处理该图像,例如通过在其中检测所述特征点从而确定其位置。
17.在一些实施例中,控制装置被配置用于动物位置确定装置或乳头位置确定装置来在对乳畜进行挤奶期间重复地确定没有乳头杯的至少一个前乳头的相应的动物位置或乳头位置,并且相应地根据所述搁置位置动态地适配所述动物位置或乳头位置。尽管可以例如通过采取相关联的最大移动来使搁置位置一次性地适应动物位置或所确定的动物部位
位置,但是反复地确定所述动物位置或乳头位置是有利的。因此,机器人臂可以跟随动物的任何移动,并且在各自情况下相应地适配机器人臂的搁置位置。这进而使得可以将机器人臂始终放置在有利的位置以捕获任何分离的乳头杯,并且使得挤奶软管和收回工具上的张力尽可能小。
18.一个有利的措施可以是,控制系统被配置成确定所述间隔涉及哪个前乳头,并且被配置用于使所述搁置位置在横向于纵向方向的水平方向上远离所述前乳头移动。因此,搁置位置可以朝向尚未进行挤奶的剩余前乳头适配到位。因此,可以进一步使相关的挤奶软管和收回工具上的可能的张力减小到最小。因此,如果需要,可以移动搁置位置,使得尚未进行挤奶的前乳头的乳头杯固持件位于相关联的乳头杯下方的适配后的搁置位置。替代性地,可以移动搁置位置,使得属于尚未进行挤奶的所有乳头的乳头杯固持件之间的距离平均起来尽可能小,例如,移到加权平均位置。
19.本发明还涉及一种根据权利要求7所述的方法,该方法用于使用根据前述权利要求中任一项所述的机器人挤奶装置对具有前乳头和后乳头的乳畜进行全自动挤奶,该方法包括:将乳头杯在乳头杯固持件上的机器人臂带到乳畜下方,使用附接到机器人臂的乳头位置确定装置来确定要进行挤奶的乳头的位置,基于所确定的位置将一个或多个乳头杯从乳头杯固持件连接到乳头,以及对与所连接的乳头杯有关的乳头进行挤奶;还包括在对要挤奶的乳头进行挤奶期间借助于控制装置来确定机器人臂相对于乳头的搁置位置,借助于控制装置来监测指示不再有乳头杯附接到至少一个前乳头的杯分离信号,以及在检测到所述杯分离信号时,借助于控制装置使机器人臂移动到适配后的搁置位置,该搁置位置沿乳畜的纵向方向与前乳头相距更大距离、特别是进一步向前。根据本发明的方法的优点对应于机器人挤奶装置的优点,因此无需全部重述。
20.在从属权利要求和说明书引言的以下部分中描述了根据本发明的方法的特定实施例。
21.在一些实施例中,该方法还包括如果在所述挤奶期间至少一个前乳头没有进行挤奶,则借助于控制装置使机器人臂来到所述适配后的搁置位置。如针对该装置所说明的,由于前乳头孔保持关闭,因此实际上风险更小,但是仍然建议尽可能地避免弄脏前乳头。注意,在所有乳头杯连接到必须进行挤奶的乳头之后采用适配后的搁置位置。
22.在一些实施例中,在所有乳头进行挤奶期间的搁置位置是乳头杯固持件在乳头下方、更特别地居中地在乳头下方时的所有乳头搁置位置,并且在各自情况下在沿乳畜的纵向方向上看,所述适配后的搁置位置相对于所有乳头搁置位置处于向前至少预定距离处,或者处于在最前面的前乳头的位置的前方至少预定距离处。正如根据本发明的装置一样,当所有具有乳头杯的乳头进行挤奶时,机器人臂的一般搁置位置为使得乳头杯固持件各自大致在相关联的乳头杯正下方,或者在任何情况下尽可能地靠近相关联的乳头杯。如果根据本发明来适配搁置位置,这通过例如使机器人臂移动至少固定距离(比如8cm到10cm之间)、特别地远离最近的乳头来完成。替代性地,机器人臂可以至少移动超过最近的乳头(通常是最前面的前乳头)预定距离。应当注意,短语“移动机器人臂使得”是指“移动机器人臂使得乳头杯固持件”,除了在涉及乳头与机器人臂可能碰撞的情况之外,在该情况下,该短语是指“移动机器人臂使得相关碰撞部分(通常是乳头位置确定装置)”。上下文将使含义更清楚。
23.在有利的实施例中,机器人臂从乳畜的一侧移动到乳畜下方,并且为了适配后的搁置位置的目的,机器人臂相对于乳畜向前移动。这是比从后部在后腿之间移动机器人臂更常见的移动机器人臂的方法,部分是因为从侧部有更多的空间用于旋转机器人臂,部分是因为粪便弄脏机器人臂的可能性更小。因此,在最常见的方法中,乳头位置确定装置沿乳畜的纵向方向几乎始终在前乳头的前方,从而向前移动确保了与乳头相距更大距离。
24.然而,根据本发明,当然可以从后部在后腿之间连接机器人臂。在这种情况下,向后看,可以移动乳头位置确定装置首先经过乳头,然后来到前乳头前方的位置。在这种情况下,具有上述特定实施例的本发明保持有效而不进行限制。然而,乳头位置确定装置也可以从后向前看,即从后乳头的后方看。于是,在本发明中,术语“前乳头”现在必须读成“后乳头”等,因为现在后乳头最靠近乳头位置确定装置。
25.现在将参照一些非限制性实施例和附图更详细地说明本发明,附图在各自情况中以示意性侧视图示出:
[0026]-图1:挤奶机器人挤奶装置,
[0027]-图2:根据现有技术的机器人挤奶装置,其中前乳头未连接,以及
[0028]-图3:根据本发明的机器人挤奶装置,其中前乳头未连接。
[0029]
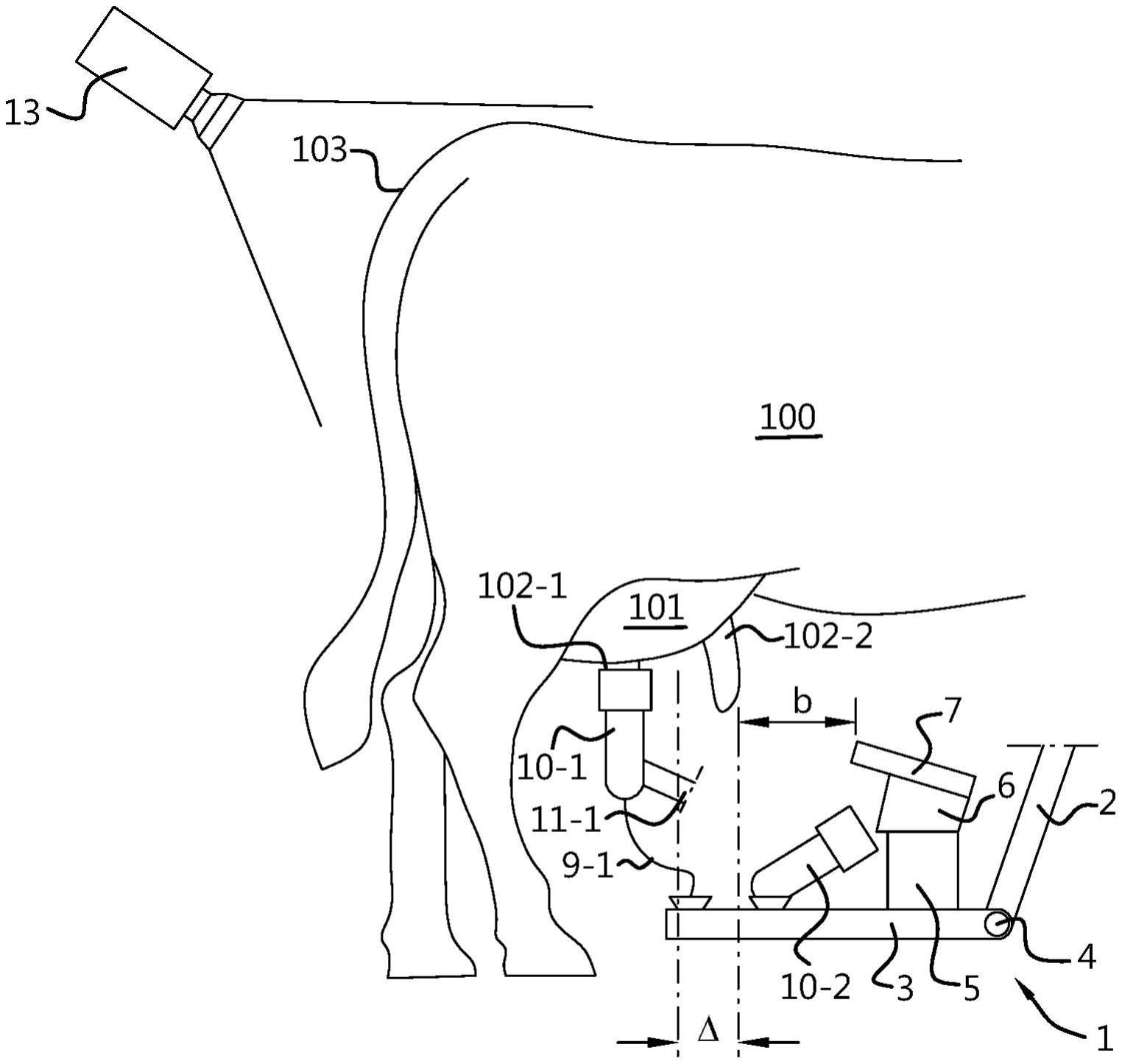
图1以示意性侧视图示出了根据现有技术和根据本发明的挤奶时的机器人挤奶装置。机器人挤奶装置用附图标记1指示,用于对具有乳房101、乳头102-1和102-2以及臀部103的乳畜100(在此为奶牛)进行挤奶,并且包括铰接在铰链4上的机器人臂部分2和端部部分3。端部部分4承载具有乳头位置确定装置6和盖7的结构5、以及乳头杯承载件8-1和8-2,在乳头杯承载件上,乳头杯10-1和10-2可以借助于绳9-1和9-2被收回。附图标记11指示奶软管和脉动软管的组合、以及其与乳头杯的连接。附图标记12是在乳头杯、乳头以及乳头杯承载件之间的中间的线。最后,附图标记13指示奶牛位置检测器。
[0030]
机器人挤奶装置1在此利用连接到后乳头102-1和前乳头102-2的乳头杯10-1和10-2来对乳畜100进行挤奶。事实上,乳畜100将具有更多的乳头,比如在正常奶牛的情况中具有四个乳头。然而,为了清楚起见,在此将其忽略。另外,为了概述,省略了与本发明无关的部分,比如每个乳头杯的挤奶软管和脉动软管11的其余部分、机器人臂2、3的其余部分、乳头清洁工具等。
[0031]
为了清楚起见,机器人挤奶装置1的控制装置也被省略。实际上,控制装置借助于硬线连接或无线连接而连接到相关部件,比如特别是乳头位置确定装置6。乳头位置确定装置在此是激光扫描器,但也可以是2d或3d相机等。为了保护乳头位置确定装置6不被弄脏,特别是不被从被挤奶的乳畜100掉落的污物弄脏,这通过顶部上的盖7来保护。
[0032]
在挤奶期间,乳头杯10-1和10-2分别连接到后乳头102-1和102-2。乳头杯10-1通过绳9-1连接到在端部部分3处的乳头杯承载件8-1,并且乳头杯10-2通过绳9-2连接到乳头杯承载件8-2。在挤奶结束或奶牛踢动时,在连接不正确或类似情况下,乳头杯与乳头分离。然后乳头杯借助于绳9而收回到乳头杯固持件上。
[0033]
为了防止乳头杯10在挤奶装置1可以借助于绳9将乳头杯收回到乳头杯承载件8上之前触碰地面,有利的是,乳头杯承载件8位于或保持位于靠近乳头杯的位置。防止挤奶和脉动软管11上的不必要的张力也是有利的。因此,乳头杯承载件8-1和8-2在此关于形成两个乳头、乳头杯和乳头杯承载件之间的中间的线12对称地布置。
[0034]
为了能够相对于乳头杯10正确地放置端部部分3,机器人挤奶装置1使用位置信息。在所示出的示例中,该位置信息可以与奶牛100相关,并且可以使用奶牛位置检测器13来获得。这例如是3d飞行时间相机或其他立体相机、或者传感器等。在3d飞行时间相机或其他光学检测器的情况下,确定并跟随奶牛的特征点,通常是臀部103或明显突出的骨头等。控制系统还包含关于乳房101和乳头相对于臀部103的相关位置的信息,使得在臀部103移动时,可以推导出乳房101和乳头102的移动,并且可以相应地适配端部部分3的位置。
[0035]
还可以例如使用乳头位置确定装置6来直接测量乳头杯10或乳头102的移动,该乳头位置确定装置于是测量并跟随乳头杯10的相对位置,由此控制系统使端部部分3相对于乳头杯10的初始相对位置尽可能保持不变。
[0036]
图2以示意性侧视图示出了根据现有技术的机器人挤奶装置1',其中前乳头102-2未连接。在整个附图中,类似的部件用相同的附图标记指示,并且在附图标记具体地涉及根据现有技术的装置的情况下,将附图标记用撇号指出。
[0037]
在此情况下,可以看出后乳头102-1仍然被乳头杯10'-1进行挤奶,但是前乳头102-2不再被挤奶,并且相关联的乳头杯10'-2已经被收回到乳头杯固持件8'-2上并且折叠到搁置状态。端部部分3'最初保持在与图1相同的位置。
[0038]
盖7'与前乳头102-2之间的距离指示为a。此外,b指示奶牛在挤奶场地沿纵向方向可以移动的距离。实际上可以对每个动物、动物类型、动物长度等测量b值。显然,特别地,发生相当突然的移动时,挤奶装置1'无法很好地跟随,从而可能导致盖7'与前乳头102-2接触。由于盖7'用于保护扫描器6'不受掉落的污物(比如排泄物)的影响,所以盖通常相对较脏。如果前乳头102-2于是触碰盖7',则污物可能会进入前乳头,因为乳头孔尚未关闭,这当然是不期望的。
[0039]
图3示出了根据本发明的机器人挤奶装置1,其中前乳头102-2未连接。可以看出,端部部分3已经移动了距离δ,以使前乳头102-2与盖7之间的距离至少为距离b。因此,在奶牛100突然移动时,前乳头102-2触碰盖7的可能性是极小的。奶牛的缓慢移动实际上可以通过跟随奶牛而解决,比如利用相机13或乳头位置检测器6,但不能是快速移动。此外,在绳9-1上以及在挤奶和脉动管线组合11-1上都将存在更大的张力,但是这不仅仍然是可控制的,不存在特别是绳丢失的缺点,而且这可能仅适用于相对小的挤奶部分。
[0040]
还应当注意,端部部分3相对于奶牛的向前移动仅在没有乳头杯10仍然连接到前乳头102-2时是有用的。这同样不适用于或至少在极小的程度上适用于后乳头102-1,因为前乳头102-2在后乳头与盖之间。此外,当前乳头102-2仍然被乳头杯10-2覆盖时,相关程度更小,因为乳头杯保护前乳头免于污物。最后,如果前乳头还没有挤奶,比如当相关乳头在挤奶期间没有被挤奶时或者由于乳头杯还没有连接到相关乳头,则是否弄脏不太重要。因为乳头孔仍然是关闭的,所以污物将不会很快地造成伤害。尽管如此,在这种情况下,与前乳头保持更大距离也总是至少稍微有利的,但是这并不总是可能的,例如如果乳头杯仍然必须连接,比如连接到后乳头。本发明的最重要的优点是:在挤奶期间,当至少前乳头全部连接时,端部部分3保持尽可能靠近乳头/乳头杯,并且端部部分3相对于前乳头充分移动,使得可以充分可靠地避免前乳头与盖或机器人臂的另一突出部分意外接触的可能性。
[0041]
在此还应提及一种替代方案,其中乳头杯从后部在后腿之间连接。显然,当不是前乳头102-2而是后乳头102-1不再承载乳头杯,并且端部部分3于是以上述实施例的镜像类
型向后移动时,本发明也适用。其他细节保持相同,并且本发明的一个重要的附加优点是:由于它更容易被粪便弄脏,从而这样的实施例在清洁度方面有了更多改进。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1