一种小动物钝挫伤打击系统的制作方法
1.本发明涉及医疗技术领域,更具体地说,它涉及一种小动物钝挫伤打击系统。
背景技术:
2.钝挫伤是由于机械性的钝力,如砖头、拳头、球类、跌撞、车祸以及爆炸的冲击波造成的损伤,除在打击部位直接产生损伤外,撞击时产生的能量也可传递到内部脏器,如大脑、肺、心脏、腹腔脏器等,造成间接损伤。
3.科研人员在研究钝挫伤时,往往是通过对小动物进行打击模拟人体损伤状态,通过打击小动物的不同部位和撞击力度来研究钝挫伤与其控制变量之间的关系,以及不同脏器、不同损伤程度时可采取的救治方案。
4.目前科研人员在研究钝挫伤的过程中,往往是用重物直接锤击或采用手枪钻的冲击力锤击小动物的不同部位制备钝挫伤模型,这种打击方式不能准确调节打击的能量;并且,现有的钝挫伤打击方法不能模拟动态过程中发生的钝挫伤状态,使得钝挫伤实验取得的结果与现实生活中发生的钝挫伤现象差距较大,以至于所得的模拟结果参考价值低。
技术实现要素:
5.本发明的目的是提供一种小动物钝挫伤打击系统,该模型打击器不仅可以准确控制打击时的冲量大小和打击位置,还能模拟小鼠、大鼠或其它相当体型的小动物在动态碰撞过程中的钝挫伤现象,为现实生活中发生钝挫伤现象提供参考数据。
6.本发明的上述技术目的是通过以下技术方案得以实现的:一种小动物钝挫伤打击系统,包括底板,所述底板的顶部设有滑槽一、固定侧板、固定板和弹射装置,所述滑槽一与固定侧板分别靠近底板的两相对端;所述滑槽一内设有碰撞装置和平移装置,所述碰撞装置套接于平移装置上;所述固定板的一侧壁与滑槽一的侧壁平齐;所述固定板远离滑槽一的侧壁设有柱形滑杆,所述柱形滑杆远离固定板的端部穿过弹射装置的中轴线处与固定侧板的侧壁固定连接;
7.所述碰撞装置包括活动箱体、平动块、支杆、滑块二、红外线发射头、撞击头和升降装置;所述活动箱体靠近固定侧板的侧壁设有贯穿侧壁的滑槽二;所述支杆套接于升降装置上,所述支杆的端部穿过滑槽二与撞击头固定连接,所述撞击头远离支杆的端部设有压力传感器二,所述撞击头的顶部与红外线发射头的底部连接;所述活动箱体的底部与滑块二的顶部固定连接,所述活动箱体与滑块二一体成型;所述平动块的顶部设有滑槽三,所述滑块二位于滑槽三内,且所述滑块二与滑槽三活动连接;所述滑槽三的两侧和滑块二均设有贯穿平动块和滑块二的两个通孔,所述平动块套接于平移装置上,所述通孔内设有限位装置;
8.所述升降装置包括轴承二、旋转螺纹杆二、锥形齿轮一、锥形齿轮二、转动杆、旋钮一、固定块一和固定块二;所述轴承二与活动箱体的内侧顶部固定连接,所述旋转螺纹杆二的顶部与轴承二固定连接,所述旋转螺纹杆二的底部与锥形齿轮一的转轴处固定连接,所
述锥形齿轮一与锥形齿轮二连接,所述锥形齿轮二的转轴处与转动杆的端部固定连接,所述转动杆远离锥形齿轮二的端部穿过活动箱体的侧壁与旋钮一的转轴处固定连接;所述支杆套接于旋转螺纹杆二上;所述固定块一的侧壁与活动箱体的内侧壁固定连接,所述固定块一套接于旋转螺纹杆二上,所述固定块二套接于转动杆上,且所述固定块二与活动箱体的内侧壁固定连接;
9.所述弹射装置包括固定装置和活动装置;所述固定装置的侧壁与活动装置固定连接;
10.所述活动装置包括两个弹簧、两个拉杆和握把;所述固定装置靠近固定侧板的侧壁与两个拉杆和两个弹簧的端部固定连接,两个所述拉杆和两个所述弹簧均沿柱形滑杆对称分布;所述固定侧板内嵌设有两个压力传感器一,两个所述弹簧远离固定装置的端部分别与两个压力传感器一连接;两个所述拉杆远离滑块一的端部穿过固定侧板与握把固定连接;
11.所述底板的外侧壁设有充电口,所述底板内设有蓄电池、无线传输装置和控制处理器;所述固定侧板远离固定装置的侧壁设有显示控制面板。
12.通过采用上述技术方案,将撞击头与支杆的端部固定连接,且支杆套接于旋转螺纹杆二上,通过旋转旋钮一可以调整撞击头的高度,同时活动箱体与平移装置连接,可以实现对撞击头水平位置的调节,从而达到对固定后的小鼠的指定位置进行碰撞的效果;将滑块二安装在滑槽三中,且滑块二位于滑槽三中,且滑块二和滑槽三均设有通孔,通孔内可拆卸连接有限位装置,这样可以实现对活动箱体进行拆卸;通过将弹簧与固定装置连接,且拉杆与固定装置连接,这样可以通过弹簧的弹力给予固定装置一个弹力,从而实现对运动事故时发生的钝挫伤现象进行模拟。
13.本发明进一步设置为:所述固定装置包括滑块一、压力传感器三、滑块三、两个手动液压升降杆、两个支撑杆、弧形支撑板、八个固定柱和角度调节装置;八个所述固定柱与弧形支撑板的凹面处固定连接,且八个所述固定柱分别位于靠近弧形支撑板的四角和四个边;两个所述支撑杆和两个手动液压升降杆的顶部均与弧形支撑板的底部连接,两个所述支撑杆和两个手动液压升降杆的底部均与滑块三的顶部固定连接;所述滑块一的顶部设有滑槽四,所述滑块三位于滑块四内,所述滑块三和滑槽四的两侧壁均设有两个贯穿滑块三和滑块一的通孔;所述滑槽四的底部嵌设有压力传感器三。
14.通过采用上述技术方案,通过在弧形支撑板上固定安装八个固定柱,且八个固定柱分别位于靠近弧形支撑板的四角和四边,这样不仅可以对小鼠进行固定,还能实现对大鼠进行有效固定;将支撑杆和手动液压升降杆的顶部与弧形支撑板的底部铰接,可以通过按压手动液压升降杆,来实现对弧形支撑板的角度调节,达到最佳的运动冲击钝挫伤模拟效果;通过在滑块三和滑槽四的两侧壁开设两个通孔,且通孔内安装有可拆卸的限位装置,这样可以实现对整个固定装置进行拆卸的效果。
15.本发明进一步设置为:所述平移装置包括旋钮二、旋转螺纹杆一和轴承一;所述轴承一与滑槽一的侧壁固定连接,所述旋转螺纹杆一的端部与轴承一固定连接,所述旋转螺纹杆一远离轴承一的端部穿过滑槽一的侧壁与旋钮二的旋转轴处固定连接。
16.通过采用上述技术方案,通过将旋钮二与旋转螺纹杆一固定连接,且活动箱体套接于旋转螺纹杆一上,从而实现对碰撞头的水平方向位置调节。
17.本发明进一步设置为:所述滑块一内设有速度传感器。
18.通过采用上述技术方案,通过在滑块一内设置速度传感器,在碰撞钝挫伤模拟过程中,可以通过速度传感器得到碰撞时的冲量,从而为研究人员提供参考值。
19.本发明进一步设置为:所述滑块三内的两个通孔之间的距离与滑块二内的两个通孔之间的距离相同。
20.通过采用上述技术方案,将滑块三内的两个通孔之间的距离与滑块二内的两个通孔之间的距离设置相同,这样可以将固定装置和碰撞装置的位置互换,从而实现不同的钝挫伤打击效果。
21.本发明进一步设置为:所述限位装置包括限位块、限位柱和固定块三;所述限位块的靠近限位柱的侧壁与滑块一或平动块的侧壁触接,所述限位柱位于通孔内,所述限位柱的端部与限位块的侧壁固定连接,所述限位柱远离限位块的端部与固定块三连接,所述固定块三靠近限位柱的侧壁与滑块一或平动块的侧壁触接。
22.通过采用上述技术方案,将限位柱插入通孔内,限位柱通过限位块与固定块三固定,固定块三通过螺纹套接在限位柱上,这样就实现了对固定装置和碰撞装置固定的效果。
23.综上所述,本发明具有以下有益效果:
24.1.将撞击头与支杆的端部固定连接,且支杆套接于旋转螺纹杆二上,通过旋转旋钮一可以调整撞击头的高度,同时活动箱体与平移装置连接,可以实现对撞击头水平位置的调节,从而达到精确控制撞击部位和内部脏器的效果;
25.2.将滑块二安装在滑槽三中,滑块二位于滑槽三中,且滑块二和滑槽三均设有通孔,通孔内可拆卸连接有限位装置,这样可以实现对活动箱体进行拆卸,从而选择性地控制动物或撞击物运动来实现撞击过程;
26.3.通过将弹簧与固定装置连接,且拉杆与固定装置连接,这样可以通过弹簧的弹力给予固定装置一个弹力,并精确控制撞击冲量的大小,从而实现对运动事故时发生的钝挫伤现象进行准确模拟。
附图说明
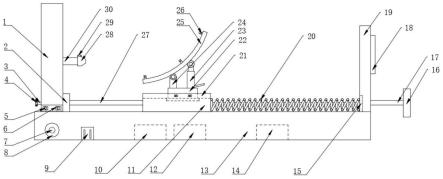
27.图1是本发明实施例中一种小动物钝挫伤打击系统的侧视图;
28.图2是本发明实施例中一种小动物钝挫伤打击系统的俯视图;
29.图3是本发明实施例中一种小动物钝挫伤打击系统的碰撞装置的侧面剖视图;
30.图4是本发明实施例中一种小动物钝挫伤打击系统的固定装置的侧视图;
31.图5是本发明实施例中一种小动物钝挫伤打击系统的限位装置的结构示意图。
32.图中:1、活动箱体;2、固定板;3、转动杆;4、旋钮一;5、通孔;6、限位块;7、旋转螺纹杆一;8、旋钮二;9、充电口;10、蓄电池;11、滑块一;12、控制处理器;13、底板;14、无线传输装置;15、压力传感器一;16、握把;17、拉杆;18、显示控制面板;19、固定侧板;20、弹簧;21、滑槽四;22、滑块三;23、手动液压升降杆;24、支撑杆;25、弧形支撑板;26、固定柱;27、柱形滑杆、28、撞击头;29、红外线发射头;30、支杆;31、轴承一;32、速度传感器;33、滑槽一;34、压力传感器三;35、限位柱;36、固定块三;37、轴承二;38、旋转螺纹杆二;39、锥形齿轮一;40、锥形齿轮二;41、固定块二;42、滑块二;43、滑槽三;44、平动块;45、固定块一;46、压力传感器二;47、滑槽二。
具体实施方式
33.以下结合附图1-5对本发明作进一步详细说明。
34.实施例:一种小动物钝挫伤打击系统,如图1至图5所示,包括底板13,底板13的顶部开有滑槽一33,且固定安装有固定侧板19、固定板2和弹射装置,滑槽一33与固定侧板19分别靠近底板13的两相对端;滑槽一33内安装有碰撞装置和平移装置,碰撞装置套接于平移装置上;固定板2的一侧壁与滑槽一33的侧壁平齐;固定板2远离滑槽一33的侧壁固定安装有柱形滑杆27,柱形滑杆27远离固定板2的端部穿过弹射装置的中轴线处与固定侧板19的侧壁固定连接;
35.碰撞装置包括活动箱体1、平动块44、支杆30、滑块二42、红外线发射头29、撞击头28和升降装置;活动箱体1靠近固定侧板19的侧壁开有贯穿侧壁的滑槽二47;支杆30套接于升降装置上,支杆30的端部穿过滑槽二47与撞击头28固定连接,撞击头28远离支杆30的端部固定连接有压力传感器二46,撞击头28的顶部与红外线发射头的底部连接;活动箱体1的底部与滑块二42的顶部固定连接,活动箱体1与滑块二42一体成型;平动块44的顶部开有滑槽三43,滑块二42位于滑槽三43内,且滑块二42与滑槽三43活动连接;滑槽三43的两侧和滑块二42均开有贯穿平动块44和滑块二42的两个通孔5,平动块44套接于平移装置上,通孔5内活动拆卸有限位装置;
36.升降装置包括轴承二37、旋转螺纹杆二38、锥形齿轮一39、锥形齿轮二40、转动杆3、旋钮一4、固定块一45和固定块二41;轴承二37与活动箱体1的内侧顶部固定连接,旋转螺纹杆二38的顶部与轴承二37固定连接,旋转螺纹杆二38的底部与锥形齿轮一39的转轴处固定连接,锥形齿轮一39与锥形齿轮二40啮合连接,锥形齿轮二40的转轴处与转动杆3的端部固定连接,转动杆3远离锥形齿轮二40的端部穿过活动箱体1的侧壁与旋钮一4的转轴处固定连接;支杆30套接于旋转螺纹杆二38上;固定块一45的侧壁与活动箱体1的内侧壁固定连接,固定块一45套接于旋转螺纹杆二38上,固定块二41套接于转动杆3上,且固定块二41与活动箱体1的内侧壁固定连接;
37.弹射装置包括固定装置和活动装置;固定装置的侧壁与活动装置固定连接;
38.活动装置包括两个弹簧20、两个拉杆17和握把16;固定装置靠近固定侧板19的侧壁与两个拉杆17和两个弹簧20的端部固定连接,两个拉杆17和两个弹簧20均沿柱形滑杆27对称分布;固定侧板19内嵌设有两个压力传感器一15,两个弹簧20远离固定装置的端部分别与两个压力传感器一15连接;两个拉杆17远离滑块一11的端部穿过固定侧板19与握把16固定连接;
39.底板13的外侧壁固定安装有充电口9,底板13内固定安装有蓄电池10、无线传输装置14和控制处理器12;固定侧板19远离固定装置的侧壁固定安装有显示控制面板18;
40.固定装置包括滑块一11、压力传感器三34、滑块三22、两个手动液压升降杆23、两个支撑杆24、弧形支撑板25、八个固定柱26和角度调节装置;如图2所示,八个固定柱26与弧形支撑板25的凹面处固定连接,且八个固定柱26分别位于靠近弧形支撑板25的四角和四个边;两个支撑杆24和两个手动液压升降杆23的顶部均与弧形支撑板25的底部连接,两个支撑杆24和两个手动液压升降杆23的底部均与滑块三22的顶部固定连接;
41.滑块一11的顶部开有滑槽四21,滑块三22位于滑块四内,滑块三22和滑槽四21的两侧壁均开有两个贯穿滑块三22和滑块一11的通孔5;滑槽四21的底部嵌设有压力传感器
三34;平移装置包括旋钮二8、旋转螺纹杆一7和轴承一31;轴承一31与滑槽一33的侧壁固定连接,旋转螺纹杆一7的端部与轴承一31固定连接,旋转螺纹杆一7远离轴承一31的端部穿过滑槽一33的侧壁与旋钮二8的旋转轴处固定连接。
42.在本实施例中,当操作者使用该装置对小鼠或大鼠进行运动冲击的模拟时,首先将小鼠或大鼠固定在弧形支撑板25上,通过绳子(图中未标注)将小鼠的四只腿固定到四个角上的固定柱26上,如果是大鼠,需要另用一个绳子将大鼠的牙齿固定;固定好小鼠后,通过平移装置进行水平调节,当对撞击头28进行高度调节时,通过旋转旋钮一4,旋钮一4带动转动杆3旋转,转动杆3带动锥形齿轮二40旋转,锥形齿轮二40带动锥形齿轮一39旋转,锥形齿轮一39带动旋转螺纹杆二38旋转,由于支杆30套接在旋转螺纹杆二38上,这样就实现了对撞击头28的高度调节;操作人员可以根据红外线发射头29发射的红外光线,其中红外线发射头29是可以拆卸的,并且内部安装了纽扣电池(图中未标注),使得红外光线对准小鼠需要打击的部位,然后操作者拉动握把16,握把16带动滑块一11朝固定侧板19方向运动,并压缩弹簧20,弹簧20受到压缩后,松开握把16,滑块一11受到弹簧20的弹力,使得滑块一11被弹射出,这样就实现了对小鼠的打击部进行打击的效果;当需要将小鼠进行固定,通过移动撞击头28来对小鼠进行打击,此时只需将通孔5内的限位装置取下,将滑块三22安装在滑块二42内,同时将滑块二42安装在滑槽四21内,通孔5对齐后,再将限位装置插入到通孔5内,从而实现对更换位置的固定装置和碰撞装置进行固定的效果;
43.本装置可以精确控制打击的冲量,实验人员可以得到冲量与打击强度的关系,从而寻找到运动过程中和静止过程中的打击规律,从而对医学上钝挫伤的研究提供实验支撑;以下是准确测量冲量的步骤(以小鼠运动冲撞为例):小鼠固定在弧形支撑板25后,通过压力传感器三34能够测出在压力传感器三上的质量m,滑块一11和压力传感器三34的质量是固定的,质量为m,当操作人员拉动握把时,滑块一11压缩弹簧20,而压力传感器一11识别出弹簧20的压力f1,弹簧20的弹性系数为k,通过计算出位移量;由于材质固定,摩擦系数μ固定;通过动能守恒定理
[0044][0045]
计算处放开握把后滑块三22到达初始位置时的速度,最终计算出小鼠撞击到撞击头28时的冲量为
[0046]
e=(m+m)v
[0047]
这样即实现了每一次拉动握把16准确得出撞击时的冲量大小,这样操作者可以找出冲量大小与钝挫伤强度之间的关系;同时由于撞击头28上有压力传感器二46,压力传感器二46可以将压力信息传递到无线传输装置14中,当每一次撞击时,都可以得出撞击时的压力,从而找到撞击时压力与钝挫伤强度之间的关系;此外在计算逻辑中,无论压力传感器三34无论是固定装置还是活动箱体1,都能准确计算出冲量大小,所以本装置不仅可以模拟运动撞击,还可以模拟将小鼠进行固定撞击,这样还提高了适用范围。
[0048]
滑块一11内嵌设有速度传感器32。
[0049]
在本实施例中,速度传感器32主要将信息反馈给控制处理器12中,主要用于校验计算速度的准确性。
[0050]
滑块三22内的两个通孔5之间的距离与滑块二42内的两个通孔5之间的距离相同。
[0051]
在本实施例中,滑块三22上的两个通孔5与滑块二42内的两个通孔5之间的距离相同,这样可以实现对滑块三22和滑块二42的位置互换,并且均能对滑块三22和滑块二42进行固定,保证每一次撞击的准确性。
[0052]
限位装置包括限位块6、限位柱35和固定块三36;限位块6的靠近限位柱35的侧壁与滑块一11或平动块44的侧壁触接,限位柱35位于通孔5内,限位柱35的端部与限位块6的侧壁固定连接,限位柱35远离限位块6的端部与固定块三36连接,固定块三36靠近限位柱35的侧壁与滑块一11或平动块44的侧壁触接。
[0053]
在本实施例中,限位装置固定的具体实现方式是将限位柱35插入通孔5,且限位块6与滑块一11的侧壁或滑块二42的侧壁触接,然后将固定块三36从另一侧套接在限位柱35上,限位柱35与固定块三36螺纹连接,这样就实现了对滑块三22或滑块二42牢牢固定的效果。
[0054]
工作原理:将撞击头28与支杆30的端部固定连接,且支杆30套接于旋转螺纹杆二38上,通过旋转旋钮一4可以调整撞击头28的高度,同时活动箱体1与平移装置连接,可以实现对撞击头28水平位置的调节,从而达到对固定后的小鼠的指定位置进行碰撞的效果;将滑块二42安装在滑槽三43中,且滑块二42位于滑槽三43中,且滑块二42和滑槽三43均设有通孔5,通孔5内可拆卸连接有限位装置,这样可以实现对活动箱体1进行拆卸;通过将弹簧20与固定装置连接,且拉杆17与固定装置连接,这样可以通过弹簧20的弹力给予固定装置一个弹力,从而实现对运动事故时发生的钝挫伤现象进行模拟。
[0055]
本具体实施例仅仅是对本发明的解释,其并不是对本发明的限制,本领域技术人员在阅读完本说明书后可以根据需要对本实施例做出没有创造性贡献的修改,但只要在本发明的权利要求范围内都受到专利法的保护。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1