一种温室或大棚果蔬用自动授粉装置
1.本发明涉及农业装备技术领域,尤其是一种温室或大棚果蔬用自动授粉装置。
背景技术:
2.现如今授粉技术已逐渐成熟,但授粉过程中使用的大部分花粉是人工采摘新鲜花蕾或者用刷子刷取,甚至已经发展出比较完整的花粉售卖产业链。目前已授权的花朵授粉发明专利较少,并且普遍围绕取粉-保存-授粉的顺序进行,比较麻烦、低效,需要耗费大量人力、物力、财力;其余专利则较为简单,只针对单一花种或者只能完成取粉或授粉一项工作,如谭玉丰等人设计的精量电动授粉器,虽然授粉均匀、充分,但需要事先将花粉储存在花粉罐内。但花粉具有很高的黏性,容易在储存容器中结块、活力下降,最后影响授粉操作;常金梅等设计的一种柚子花授粉装置,虽然解决了取粉、授粉一体化问题,但仍需要人手持进行操作,较浪费劳动资源。
3.在授粉过程中,有的花朵对温度的要求比较高,例如草莓尽可能在中午十点至下午三点之间进行授粉,以保证授粉温度在15~35℃之间;西瓜开花坐果期的适宜温度为25~30℃。如果在气温超过适宜温度,花粉粒的机能就会下降,会使果实畸形、甚至不结果,所以需要采取措施来调节温室内的小气候。
技术实现要素:
4.本发明所要解决的技术问题在于,提供一种温室或大棚果蔬用自动授粉装置,能够在适宜的环境下高效完成喷灌授粉工作,节省资源,提高效率。
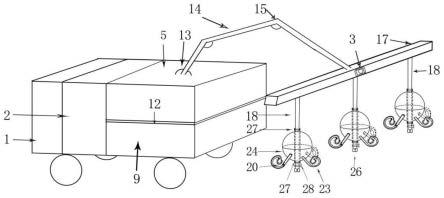
5.为解决上述技术问题,本发明提供一种温室或大棚果蔬用自动授粉装置,包括:智能识别和移动装置,管网和微喷授粉装置;智能识别和移动装置附着于管网前侧,微喷授粉装置位于管网末端;
6.智能识别和移动装置包括驱动装置1、可充电电池2、智能识别系统3、调控机械臂14;管网包括逆止阀4、供气室5、空气压缩机6、主干管7、导气管8、储水室9、抽水泵10、导水管11、隔离板12、自由轴承13、转动轴承15、气液共用主干管16和支撑臂17;微喷授粉装置包括气液共用管18、气囊19、绒毛20、内管21、外管22、可伸缩装置23、气液分离室24、弹簧25、折射喷头26、轴承27和阀门28;
7.可充电电池2分别与智能识别系统3和驱动装置1直接连接,逆止阀4安装于导气管8和导水管11中,隔离板12将车室内供气室5和储水室9隔离开,形成各自封闭的供气室5和储水室9,主干管7、气液共用主干管16、气液共用管18依次联通,搭载于调控机械臂14内部,并连接气液分离室24、可伸缩装置23与折射喷头26,由开关控制管道切换,气液分离室24连接数个可伸缩装置23,每个可伸缩装置23都由轻便弹簧25支撑,气囊19经过可伸缩装置23、气液分离室24、气液共用管18、气液共用主干管16、主干管7与空气压缩机6相连,气囊19表面覆盖有一层绒毛20,由智能识别系统3识别并通过驱动装置1操纵空气压缩机6开关来控制气囊19的膨胀与收缩,并在气囊19收缩后,由弹簧25和可伸缩装置23带动卷缩,折射喷头
26与内管21相连,再经由气液共用支管18、气液共用主干管16、主干管7、导水管11与水泵10相连,内管21和外管22组成了气液分离管,内外管之间的上下两端分别装有橡胶密封式超薄轴承27,实现内管和外管的相对转动,气液分离室24固定在外管22外侧,呈封闭状态,内管21与气液共用支管18直接相连,自由轴承13将车室和调控机械臂14连接,水平方向180
°
、竖直方向90
°
旋转带动调控机械臂14,转动轴承15调节调控机械臂14的角度,转动轴承15有内外圈,内圈和外圈分别与两个构架配合,中间有轴承珠,内外圈相对转动来调节调控机械臂14的角度;进行微灌模式时,转动外管22使内外管的气孔错落开,阀门28呈竖直状态,抽水泵10启动,带有一定压力的水流通过主干管7、气液共用主干管16、支撑臂17、气液共用支管18,经过内管21后到达折射喷头26,完成微喷灌;进行授粉模式时,将阀门28拧至水平状态,内管21和外管22上的孔洞拧至水平方向重合,保证气体顺利进入气液分离室24中。
8.优选的,气囊19由韧性材料制成,拥有较强的可膨胀性。
9.优选的,可伸缩装置23由韧性材料构成,中间有一自然卷曲的弹簧25;气压较小时,弹簧25呈自然卷曲状,韧性材料呈长扁纵向卷曲状贴附于弹簧25外,包裹住弹簧25;空气压缩机6工作使得微灌授粉装置内部气压较大时,弹簧25被气流带动伸展,韧性材料同时被弹簧和气流吹展带动,伸直呈圆柱状,气压较小时则又由弹簧的弹性自动卷回长扁纵向卷曲状。
10.优选的,阀门28中间有圆柱形镂空,竖直放置时可通过上下方向的气体或液体,水平放置时上下方向则封闭,气体液体均通不过,保护喷头26免被气流冲击至损坏;在进行微灌模式时阀门呈竖直状态,保证水流顺利通过到达喷头26;授粉模式时阀门呈水平状态,保证内管21和喷头26隔离开。
11.优选的,授粉模式下,当智能识别系统3识别出植株生长阶段达到授粉要求时间时,装置自动开始运行;驱动装置1带动车轮将装置移动至植株上方,由智能识别系统3识别花朵的位置,控制调控机械臂14与支撑臂17到花朵附近;空气压缩机6开启,可伸缩装置23充气伸长,气囊19逐渐膨胀接触花朵;绒毛20在气囊19膨胀过程中扫过花蕊实现自花授粉,装置移动至下一位置重复操作时绒毛20上沾有的花粉实现异花授粉。
12.优选的,灌溉模式下,由抽水泵10将储水室9中的水抽出,水流依次压入导水管11、主干管7、气液共用主干管16、气液共用支管18,后通过微灌授粉装置的内管21并由折射喷头26喷出。
13.本发明的有益效果为:本发明将新型授粉装置和喷灌相结合,解决了授粉低效、困难、人工量大的问题,同时还能通过喷灌来提高空气湿度,调节小气候;通过智能识别和移动装置对三项功能进行统一控制,实现对作物生长不同时期需求的系统化、智能化管理。
附图说明
14.图1为本发明的外管结构示意图。
15.图2为本发明的剖面结构示意图。
16.图3为本发明的授粉喷灌装置收缩状态下示意图。
17.图4为本发明的授粉喷灌装置伸展状态下示意图。
18.图5为本发明的气液分离室示意图。
19.图6为本发明的气液分离管示意图。
20.图7为本发明的气液分离管轴承部分示意图。
21.图8为本发明的挡水装置示意图。
22.其中,1、驱动装置;2、可充电电池;3、智能识别系统;4、逆止阀;5、供气室;6、空气压缩机;7、主干管;8、导气管;9、储水室;10、抽水泵;11、导水管;12、隔离板;13、自由轴承;14、调控机械臂;15、转动轴承;16、气液共用主干管;17、支撑臂;18、气液共用管;19、气囊;20、绒毛;21、内管;22、外管;23、可伸缩装置;24、气液分离室;25、弹簧;26、折射喷头;27、轴承;28、阀门。
具体实施方式
23.如图1-8所示,一种温室或大棚果蔬用自动授粉装置,包括:智能识别和移动装置,管网和微喷授粉装置;智能识别和移动装置附着于管网前侧,微喷授粉装置位于管网末端;
24.智能识别和移动装置包括驱动装置1、可充电电池2、智能识别系统3、调控机械臂14;管网包括逆止阀4、供气室5、空气压缩机6、主干管7、导气管8、储水室9、抽水泵10、导水管11、隔离板12、自由轴承13、转动轴承15、气液共用主干管16和支撑臂17;微喷授粉装置包括气液共用管18、气囊19、绒毛20、内管21、外管22、可伸缩装置23、气液分离室24、弹簧25、折射喷头26、轴承27和阀门28;
25.可充电电池2分别与智能识别系统3和驱动装置1直接连接,逆止阀4安装于导气管8和导水管11中,隔离板12将车室内供气室5和储水室9隔离开,形成各自封闭的供气室5和储水室9,主干管7、气液共用主干管16、气液共用管18依次联通,搭载于调控机械臂14内部,并连接气液分离室24、可伸缩装置23与折射喷头26,由开关控制管道切换,气液分离室24连接数个可伸缩装置23,每个可伸缩装置23都由轻便弹簧25支撑,气囊19经过可伸缩装置23、气液分离室24、气液共用管18、气液共用主干管16、主干管7与空气压缩机6相连,气囊19表面覆盖有一层绒毛20,由智能识别系统3识别并通过驱动装置1操纵空气压缩机6开关来控制气囊19的膨胀与收缩,并在气囊19收缩后,由弹簧25和可伸缩装置23带动卷缩,折射喷头26与内管21相连,再经由气液共用支管18、气液共用主干管16、主干管7、导水管11与水泵10相连,内管21和外管22组成了气液分离管,内外管之间的上下两端分别装有橡胶密封式超薄轴承27,实现内管和外管的相对转动,气液分离室24固定在外管22外侧,呈封闭状态,内管21与气液共用支管18直接相连,自由轴承13将车室和调控机械臂14连接,水平方向180
°
、竖直方向90
°
旋转带动调控机械臂14,转动轴承15调节调控机械臂14的角度,转动轴承15有内外圈,内圈和外圈分别与两个构架配合,中间有轴承珠,内外圈相对转动来调节调控机械臂14的角度;进行微灌模式时,转动外管22使内外管的气孔错落开,阀门28呈竖直状态,抽水泵10启动,带有一定压力的水流通过主干管7、气液共用主干管16、支撑臂17、气液共用支管18,经过内管21后到达折射喷头26,完成微喷灌;进行授粉模式时,将阀门28拧至水平状态,内管21和外管22上的孔洞拧至水平方向重合,保证气体顺利进入气液分离室24中。
26.可伸缩装置23由韧性材料构成,中间有一自然卷曲的弹簧25;气压较小时,弹簧25呈自然卷曲状,韧性材料呈长扁纵向卷曲状贴附于弹簧25外,包裹住弹簧25;空气压缩机6工作使得微灌授粉装置内部气压较大时,弹簧25被气流带动伸展,韧性材料同时被弹簧和气流吹展带动,伸直呈圆柱状,气压较小时则又由弹簧的弹性自动卷回长扁纵向卷曲状。
27.阀门28中间有圆柱形镂空,竖直放置时可通过上下方向的气体或液体,水平放置
时上下方向则封闭,气体液体均通不过,保护喷头26免被气流冲击至损坏;在进行微灌模式时阀门呈竖直状态,保证水流顺利通过到达喷头26;授粉模式时阀门呈水平状态,保证内管21和喷头26隔离开。
28.授粉模式下,当智能识别系统3识别出植株生长阶段达到授粉要求时间时,装置自动开始运行;驱动装置1带动车轮将装置移动至植株上方,由智能识别系统3识别花朵的位置,控制调控机械臂14与支撑臂17到花朵附近;空气压缩机6开启,可伸缩装置23充气伸长,气囊19逐渐膨胀接触花朵;绒毛20在气囊19膨胀过程中扫过花蕊实现自花授粉,装置移动至下一位置重复操作时绒毛20上沾有的花粉实现异花授粉。
29.灌溉模式下,由抽水泵10将储水室9中的水抽出,水流依次压入导水管11、主干管7、气液共用主干管16、气液共用支管18,后通过微灌授粉装置的内管21并由折射喷头26喷出。
30.工作原理:
31.(1)取粉模式:可伸缩装置23由一种韧性材料构成,中间有一轻便弹簧25。有空气进入时弹簧25在气流的带动下伸展,可伸缩装置23被带动展开呈圆柱状,空气停止进入时弹簧25则自动卷回,带动可伸缩装置23呈长扁纵向卷曲状。可伸缩管23和气囊19相连接,具有很好的延展性,可以根据空气压缩机6进入空气的体积和速度来控制气囊19膨胀的大小。空气压缩机6启动后,被压缩的气体依次通过导气管8、主干管7、气液共用主干管16、支撑臂17和气液共用支管18进入内管21内,通过内外管的空隙流入气液分离室24、可伸缩装置23和气囊19。气囊19通入空气后伸到花朵附近,附着的绒毛20蘸取花朵上的花粉。气囊19持续膨胀触碰到雌蕊后,绒毛20上黏附的花粉散落在雌蕊附近,完成自花授粉。
32.(2)授粉模式:空气压缩机6关闭后,弹簧25带动可伸缩装置23和气囊19收缩,气囊19连带绒毛20被卷回可伸缩装置23内部,完成一次取粉。驱动装置1启动,识别到下一朵花时由调控机械臂14调节高度和位置,空气压缩机6启动,弹簧25、可伸缩装置23和气囊19回展,气囊19上绒毛20与花蕊接触,所携带的花粉黏附在花朵雌蕊上,完成一次异花授粉过程。
33.(3)喷灌模式:通过外接水源将灌溉用水补充入储水室9,驱动装置1根据识别系统3识别的结果移动到需要灌溉或需要调节小气候的位置,抽水泵10启动抽取储水室9中所储存的溶液,依次通过导水管11、主干管7、气液共用主干管16、支撑臂17和气液共用支管18,落入气液分离室24内的内管21中,通过竖直状态的阀门28到达折射喷头26进行喷灌。同时可通过识别系统3控制调控机械臂14和转动轴承15,对喷头位置、灌溉范围进行控制。
34.本发明将新型授粉装置和喷灌相结合,解决了授粉低效、困难、人工量大的问题,同时还能通过喷灌来提高空气湿度,调节小气候。通过智能识别和移动装置对三项功能进行统一控制,实现对作物生长不同时期需求的系统化、智能化管理。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1