一种洋葱收获机及其使用方法与流程
1.本发明涉及洋葱收获技术领域,具体为一种洋葱收获机及其使用方法。
背景技术:
2.进入21世纪以来,在国家农机推广部门和地方各级政府的正确领导和大力支持下,洋葱收获机行业得到了快速的发展,到2010年全国洋葱联合收获机保有量达到了12.8万台,机械化收获玉米1.3亿亩,机收率达到了25%,其中洋葱收获机收第一大省山东省洋葱收获机保有量达到5.8万台,机收率71.5%,在国内率先实现了洋葱机械化收获。
3.现有的大多的洋葱收获机只能完成对已经脱离土壤的洋葱进行收集打包处理,对于洋葱与土壤的脱离工作还需要进行人工分离,虽然不用再进行收集工作,长时间的弯腰将洋葱与土壤进行剥离还是会导致工人异常疲劳,操作时间过长还会导致工作效率下降的问题出现;其次现有的少数洋葱收获机虽然能将洋葱从土壤中进行铲起,进行颠簸,从而将洋葱表面的土壤进行分离,但是再颠簸过长中容易导致洋葱撞击,从而造成洋葱出现损坏的问题。
4.基于此,本发明设计了一种洋葱收获机及其使用方法,以解决上述问题。
技术实现要素:
5.本发明的目的在于提供一种洋葱收获机及其使用方法,以解决上述背景技术中提出的现有的大多的洋葱收获机只能完成对已经脱离土壤的洋葱进行收集打包处理,对于洋葱与土壤的脱离工作还需要进行人工分离,虽然不用再进行收集工作,长时间的弯腰将洋葱与土壤进行剥离还是会导致工人异常疲劳,操作时间过长还会导致工作效率下降的问题出现;其次现有的少数洋葱收获机虽然能将洋葱从土壤中进行铲起,进行颠簸,从而将洋葱表面的土壤进行分离,但是再颠簸过长中容易导致洋葱撞击,从而造成洋葱出现损坏的问题。
6.为实现上述目的,本发明提供如下技术方案:一种洋葱收获机,包括用于固定到移动设备上的固定架和用于铲除洋葱根的空心的三角板,所述固定架与三角板平行排列,所述固定架高于三角板,所述三角板和固定架之间固定设置有多个平行的支架杆,相邻的支架杆之间设置有两个洗刷滚筒,所述洗刷滚筒上端通过摇摆机构转动设置在固定架侧壁上,所述洗刷滚筒下端通过万向机构转动设置在三角板上,所述洗刷滚筒外侧螺旋排列固定设置有刷毛,相邻的刷毛螺旋方向相反,所述万向机构传动连接有驱动相邻洗刷滚筒相反转动的驱动机构。
7.作为本发明的进一步方案,所述万向机构包括通过支架同轴固定设置在洗刷滚筒下端中央的球头杆,所述球头杆外侧套设有用于包裹球头杆的球头套,所述球头套内壁与球头杆外壁开设有轴线垂直的万向槽,每个所述万向槽内部滑动连接有万向滑块,其中位于球头套的万向槽内的万向滑块固定设置在球头杆外壁,位于球头杆的万向槽内的万向滑块固定设置在球头套内壁,所述球头套外侧通过与其固定设置的驱动杆转动设置在三角板
侧壁上,每个所述驱动杆穿过三角板的一端同轴固定设置有第一锥齿轮,每个所述第一锥齿轮外侧设置有用于驱动相邻驱动杆相反转动的传动组件。
8.作为本发明的进一步方案,所述传动组件包括分别与第一锥齿轮啮合的第二锥齿轮,每个所述第二锥齿轮中央同轴固定设置有定位杆,所述定位杆通过支架转动设置在三角板内部,相邻的第二锥齿轮大头端或者小头端相互靠近,所述定位杆上通过第一锥齿轮组传动连接在驱动机构上,洗刷滚筒在被传动组件进行驱动转动时,洗刷滚筒上端通过摇摆机构转动设置在固定架侧壁上。
9.作为本发明的进一步方案,所述摇摆机构包括通过支架固定设置在每个洗刷滚筒上端内部的摇摆轴,每个所述摇摆轴外侧套设滑环,所述滑环外壁固定设置有摇摆杆,所述摇摆杆横向滑动设置在固定架上开设的位移长圆孔内壁,所述固定架上开设有多个用于避让摇摆轴横向移动的摇摆长圆孔,相邻的所述摇摆杆两端均转动设置有一组长度相等的四边杆,所述四边杆中间通过两个定向轴转动连接,所述定向轴通过与固定架固定的限位支架滑动设置在固定架上,同一组四边杆上的其中一个摇摆杆通过往复机构传动连接到驱动机构上。
10.作为本发明的进一步方案,所述往复机构包括位于四边杆中央通过支架转动在固定架外壁上的偏心凸轮盘,所述偏心凸轮盘通过与其转动连接的连杆传动连接到摇摆杆上,所述连杆与摇摆杆转动连接,所述偏心凸轮盘外侧套设有同步带,所述同步带内侧还套设有转动设置在固定架上的驱动盘,所述驱动盘通过齿轮组传动连接到驱动机构上。
11.作为本发明的进一步方案,每个所述支架杆上端均固定设置有固定刀,所述固定刀侧壁的支架杆上端横向滑动设置有移动刀,所述固定刀和移动刀上开设有错位的三角缺槽,所述移动刀后端固定设置有l拉杆,所述l拉杆滑动设置在支架杆和固定架上,每个所述l拉杆另外一端固定设置有同步杆,所述同步杆上端固定设置有多个推动块,所述推动块通过支架固定设置在定向轴上。
12.作为本发明的进一步方案,所述驱动杆上套设有用于保护万向机构的防护罩。
13.作为本发明的进一步方案,所述驱动机构包括转动设置在固定架后端用于与外界进行动力连接的动力轴,所述动力轴下端通过齿轮组传动连接到驱动盘,所述动力轴上端通过与其啮合的齿轮棒传动连接到第一锥齿轮组。
14.作为本发明的进一步方案,一种洋葱收获方法,该洋葱收获方法的具体步骤如下:
15.步骤一:将洋葱收获机的固定架固定设置到带有升降装置的载具上,将载具的动力系统连接到设备的驱动机构中,从而使得洋葱收获机获得运行动力,通过载具移动将洋葱收获机携带运输到洋葱收获现场;
16.步骤二:通过载具升降将洋葱收获机释放到底面上,同时启动驱动机构,使得洋葱收获机获得动力,万向机构启动开始工作,驱动洗刷滚筒开始转动,同时启动载具向前移动,将洋葱收获机前端插入泥土中;
17.步骤三:洋葱收获机前端插入泥土中后将土壤内部的洋葱铲起,使得泥土和洋葱沿着洗刷滚筒斜坡向上移动,从而将洋葱向上传输,同时的洗刷滚筒的转动使得螺旋的刷毛转动,从而使得洋葱向上移动;
18.步骤四:洋葱沿着洗刷滚筒倾斜向上移动,同时刷毛与洋葱表面的泥土进行摩擦,使得洋葱在洗刷滚筒之间滚动,同时使得泥土从洗刷滚筒之间间隙掉落到设备下端,从而
完成对洋葱进行土壤分离且同时进行运输的效果;
19.步骤五:在洋葱进行土壤分离的过程中往复机构工作驱动洗刷滚筒进行间歇的相互靠近和远离,从而使得洋葱在洗刷滚筒之间的刷毛之间形成挤压和释放的过程,从而进行高效的泥土搓刷,从而进行高效分离土壤的过程;
20.步骤六:在驱动洗刷滚筒进行间歇的相互靠近和远离时,摇摆机构还驱动移动刀在支架杆上往复滑动,从而使得移动刀和固定刀产生错位,从而完成洋葱秸秆的切除工作,土壤分离完成后的洋葱被传输到洗刷滚筒后端上方,再受到自身重力掉落到现有的收集斗中,从而完成洋葱的整体收获。
21.与现有技术相比,本发明的有益效果是:
22.1.本发明通过反向转动的洗刷滚筒,将地面以下的洋葱铲起后,使得洋葱沿着洗刷滚筒向设备后端进行转运移动,在这一过程中,通过洗刷滚筒外壁的螺旋式刷毛驱动洋葱往上后方移动的同时,将洋葱表面的泥土进行搓刷,其次在洋葱移动过程中驱动摇摆机构驱动洗刷滚筒和刷毛对洋葱进行靠近或者远离,从而提高对洋葱表面的压力,从而提高设备的搓刷效率,提高洋葱脱泥效率。
23.2.本发明使用时通过驱动机构驱动摇摆机构进行工作,使得洗刷滚筒通过万向机构不断的获得旋转动力,两个相邻的洗刷滚筒前端与三角板进行铰接,前端的靠近远离距离较小,后端进行摇摆靠近距离较大,从而有效解决了洋葱在洗刷滚筒上进行向上移动时呈现上下距离拨动越来越大,从而形成挤压力越来越大,避免了洋葱直接携带大量泥土卡在下端的洗刷滚筒之间难以进行转运的问题出现,缓慢增加去泥效果。
24.3.本发明通过驱动机构驱动驱动盘转动,再驱动同步带转动驱动偏心凸轮盘转动,偏心凸轮盘转动再驱动连杆驱动摇摆杆进行往复高效工作,且反应速度快,稳定,使得洗刷滚筒摇摆速度快稳定性高。
附图说明
25.为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
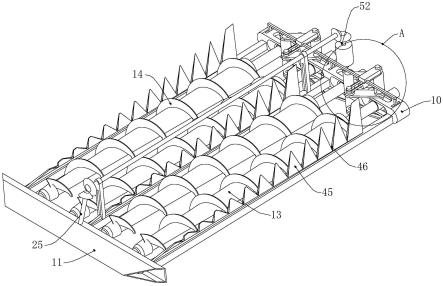
26.图1为本发明总体结构示意图;
27.图2为本发明图1中a处放大结构示意图;
28.图3为本发明侧仰视总体结构示意图;
29.图4为本发明图3中b处放大结构示意图;
30.图5为本发明侧俯视局部剖视结构示意图;
31.图6为本发明图5中c处放大结构示意图;
32.图7为本发明图6中d处放大结构示意图;
33.图8为本发明图5中e处放大结构示意图;
34.图9为本发明图5中f处放大结构示意图;
35.图10为本发明9中g处放大结构示意图;
36.图11为本发明图5中h处放大结构示意图;
37.图12为本发明方法流程总体结构示意图。
38.附图中,各标号所代表的部件列表如下:
39.固定架10,三角板11,支架杆12,洗刷滚筒13,刷毛14,万向槽15,球头杆16,球头套17,万向滑块18,驱动杆19,第一锥齿轮20,第二锥齿轮23,定位杆24,第一锥齿轮组25,摇摆轴28,滑环29,摇摆杆30,位移长圆孔31,摇摆长圆孔32,四边杆33,定向轴34,限位支架35,偏心凸轮盘38,连杆39,同步带40,驱动盘41,齿轮组42,固定刀45,移动刀46,l拉杆47,同步杆48,推动块49,防护罩51,动力轴52。
具体实施方式
40.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
41.请参阅图1-12,本发明提供一种技术方案:一种洋葱收获机,包括用于固定到移动设备上的固定架10和用于铲除洋葱根的空心的三角板11,固定架10与三角板11平行排列,固定架10高于三角板11,三角板11和固定架10之间固定设置有多个平行的支架杆12,相邻的支架杆12之间设置有两个洗刷滚筒13,洗刷滚筒13上端通过摇摆机构转动设置在固定架10侧壁上,洗刷滚筒13下端通过万向机构转动设置在三角板11上,洗刷滚筒13外侧螺旋排列固定设置有刷毛14,相邻的刷毛14螺旋方向相反,万向机构传动连接有驱动相邻洗刷滚筒13相反转动的驱动机构;
42.本发明使用前先将本装置组装完毕(如图1所示其中,从左向右看为本装置的上端,从下往上看为本装置的前端,此后叙述采用设备方位进行描述不再进行赘述,其中本装置的前端小后端大,从而在铲起洋葱时能尽量保持洋葱底面的铲起施力较为密集,从而避免将洋葱产坏的问题出现,再铲起后再进行分离脱泥,避免洋葱之间出现撞击的问题),本装置不带有移动机构,且不带有自身动力机构,本设备为收获机,需要在野外进行工作,使用电力不是最佳选择,最好采用的方式为采用移动载具进行悬挂,从而使得本设备进行移动,再通过移动载具自身的动力源输入到本设备为最佳选择,将洋葱收获机的固定架10固定设置到带有升降装置的载具上(本设备后续再工作时,前端需要插入泥土中对洋葱进行铲起操作,二在运输移动时不能与地面接触,从而需要带有升降悬挂的载具进行运输),将载具的动力系统连接到设备的驱动机构中,从而使得洋葱收获机获得运行动力,通过载具移动将洋葱收获机携带运输到洋葱收获现场;
43.本发明使用时,载具驱动设备的固定架10下降使得三角板11插入泥土内部,同时支架杆12对三角板11进行施力使得驱动设备向前移动,将土壤内部的泥土铲起,从而完成洋葱脱离地面土壤的过程(如图1所示),其次这一过程中驱动机构万向机构工作,万向机构工作驱动洗刷滚筒13进行转动,从而驱动螺旋的刷毛14进行转动(如图1所示,相邻的刷毛14螺旋方向相反,在两个相邻的洗刷滚筒13相反转动时能始终将洋葱向上运输,图中并未进行相反的螺旋展示,根据绘图方便性,直接采用了相同的螺旋方式,实际过程中采用相反螺旋方式进行布置),同时的设备移动驱动支架杆12推动,使得洋葱不断被铲起送到两个洗刷滚筒13上,且相邻的洗刷滚筒13之间相反转动,从而将洋葱不断进行翻动(洋葱本身不是
均匀的圆球,为椭圆球形,从而能在两个转动方向相反的洗刷滚筒13之间不断进行位置变换),洋葱边翻滚,边受到刷毛14的转动,刷毛14一方面对洋葱表面的泥土进行搓刷,另外一方面刷毛14也能通过自身的螺旋方向将洋葱向上克服自身重力进行传输,其次摇摆机构驱动驱动洗刷滚筒13之间出现间隙改变,从而能对洋葱表面施加压力,从而提高刷毛14与洋葱的压力,从而提高洋葱脱泥工作(摇摆机构工作时,万向机构保持洗刷滚筒13边转动边绕着前端的铰接点进行角度变换),从而完成洋葱的收获脱泥工作;
44.本发明通过反向转动的洗刷滚筒13,将地面以下的洋葱铲起后,使得洋葱沿着洗刷滚筒13向设备后端进行转运移动,在这一过程中,通过洗刷滚筒13外壁的螺旋式刷毛14驱动洋葱往上后方移动的同时,将洋葱表面的泥土进行搓刷,其次在洋葱移动过程中驱动摇摆机构驱动洗刷滚筒13和刷毛14对洋葱进行靠近或者远离,从而提高对洋葱表面的压力,从而提高设备的搓刷效率,提高洋葱脱泥效率。
45.作为本发明的进一步方案,万向机构包括通过支架同轴固定设置在洗刷滚筒13下端中央的球头杆16,球头杆16外侧套设有用于包裹球头杆16的球头套17,球头套17内壁与球头杆16外壁开设有轴线垂直的万向槽15,每个万向槽15内部滑动连接有万向滑块18,其中位于球头套17的万向槽15内的万向滑块18固定设置在球头杆16外壁,位于球头杆16的万向槽15内的万向滑块18固定设置在球头套17内壁,球头套17外侧通过与其固定设置的驱动杆19转动设置在三角板11侧壁上,每个驱动杆19穿过三角板11的一端同轴固定设置有第一锥齿轮20,每个第一锥齿轮20外侧设置有用于驱动相邻驱动杆19相反转动的传动组件;传动组件包括分别与第一锥齿轮20啮合的第二锥齿轮23,每个第二锥齿轮23中央同轴固定设置有定位杆24,定位杆24通过支架转动设置在三角板11内部,相邻的第二锥齿轮23大头端或者小头端相互靠近,定位杆24上通过第一锥齿轮组25传动连接在驱动机构上,洗刷滚筒13在被传动组件进行驱动转动时,洗刷滚筒13上端通过摇摆机构转动设置在固定架10侧壁上;摇摆机构包括通过支架固定设置在每个洗刷滚筒13上端内部的摇摆轴28,每个摇摆轴28外侧套设滑环29,滑环29外壁固定设置有摇摆杆30,摇摆杆30横向滑动设置在固定架10上开设的位移长圆孔31内壁,固定架10上开设有多个用于避让摇摆轴28横向移动的摇摆长圆孔32,相邻的摇摆杆30两端均转动设置有一组长度相等的四边杆33,四边杆33中间通过两个定向轴34转动连接,定向轴34通过与固定架10固定的限位支架35滑动设置在固定架10上,同一组四边杆33上的其中一个摇摆杆30通过往复机构传动连接到驱动机构上;
46.本发明使用时,如图5和6所示,驱动机构工作驱动第一锥齿轮组25转动,第一锥齿轮组25转动驱动定位杆24在三角板11内部转动,定位杆24转动驱动第二锥齿轮23转动(如图5所示,相邻的第二锥齿轮23相对称,既大头端或小头端相互靠近,从而使得相邻的第一锥齿轮20转动方向相反),第二锥齿轮23转动驱动第一锥齿轮20转动,第一锥齿轮20转动驱动驱动杆19在三角板11侧壁转动,驱动杆19转动驱动上端的球头套17转动,球头套17转动通过球头套17和球头杆16上的万向滑块18卡住万向槽15,使得动力传递到球头杆16上,且两个万向槽15和两个万向滑块18轴线垂直,从而能完成角度弯折的情况下将动力传递到球头杆16上(如图6和7所示),球头杆16转动驱动洗刷滚筒13转动;从而能完成洗刷滚筒13的对洋葱进行转动传输;
47.在这一过程中驱动机构驱动往复机构(如图8、9和10所示),从而使得摇摆杆30在固定架10上的位移长圆孔31进行左右移动,又由于四边杆33中间铰接轴受到限位支架35限
制,只能进行设备的前后移动,从而使得四边杆33的两个摇摆杆30间歇靠近和远离,从而使得滑环29在摇摆长圆孔32内部进行间歇靠近和远离,从而使得洗刷滚筒13上端进行靠近和分离,从而提高对洋葱的挤压力,从而完成高效搓刷,使得洋葱表面的泥土清理得更加干净(如图1所示,从设备上端看,在设备前端小,后端大,且两个相邻的洗刷滚筒13前端与三角板11进行铰接,前端的靠近远离距离较小,后端进行摇摆靠近距离较大,从而有效解决了洋葱在洗刷滚筒13上进行向上移动时呈现上下距离拨动越来越大,从而形成挤压力越来越大,避免了洋葱直接携带大量泥土卡在下端的洗刷滚筒13之间难以进行转运的问题出现,缓慢增加去泥效果);
48.本发明使用时通过驱动机构驱动摇摆机构进行工作,使得洗刷滚筒13通过万向机构不断的获得旋转动力,两个相邻的洗刷滚筒13前端与三角板11进行铰接,前端的靠近远离距离较小,后端进行摇摆靠近距离较大,从而有效解决了洋葱在洗刷滚筒13上进行向上移动时呈现上下距离拨动越来越大,从而形成挤压力越来越大,避免了洋葱直接携带大量泥土卡在下端的洗刷滚筒13之间难以进行转运的问题出现,缓慢增加去泥效果。
49.作为本发明的进一步方案,往复机构包括位于四边杆33中央通过支架转动在固定架10外壁上的偏心凸轮盘38,偏心凸轮盘38通过与其转动连接的连杆39传动连接到摇摆杆30上,连杆39与摇摆杆30转动连接,偏心凸轮盘38外侧套设有同步带40,同步带40内侧还套设有转动设置在固定架10上的驱动盘41,驱动盘41通过齿轮组42传动连接到驱动机构上;
50.如图4所示,本发明通过驱动机构驱动驱动盘41转动,再驱动同步带40转动驱动偏心凸轮盘38转动,偏心凸轮盘38转动再驱动连杆39驱动摇摆杆30进行往复高效工作,且反应速度快,稳定,使得洗刷滚筒13摇摆速度快稳定性高。
51.作为本发明的进一步方案,每个支架杆12上端均固定设置有固定刀45,固定刀45侧壁的支架杆12上端横向滑动设置有移动刀46,固定刀45和移动刀46上开设有错位的三角缺槽,移动刀46后端固定设置有l拉杆47,l拉杆47滑动设置在支架杆12和固定架10上,每个l拉杆47另外一端固定设置有同步杆48,同步杆48上端固定设置有多个推动块49,推动块49通过支架固定设置在定向轴34上;
52.本发明使用时,四边杆33的两个摇摆杆30间歇靠近和远离时,四边杆33的两个定向轴34也前后移动,定向轴34前后移动驱动推动块49前后移动,推动块49前后移动驱动同步杆48前后移动,且同步杆48前后移动推动l拉杆47在固定架10和支架杆12腔体内进行前后移动,从而使得移动刀46在支架杆12上前后移动与固定刀45产生位移差,从而将固定刀45和移动刀46上开设的错位的三角缺槽内部的洋葱秸秆进行切割,避免缠绕在洗刷滚筒13上(如图3和11所示,其中洋葱在洗刷滚筒13之间翻滚时,必然会导致秸秆出现摆动,其次秸秆翻滚到三角缺槽内部内部时,洗刷滚筒13还在将洋葱进行向上传输,且向支架杆12进行靠近和远离的间歇移动,使得秸秆被切割时出现拉扯,从而使得固定刀45和移动刀46进行切割时,避免出现搓刀现象,即洋葱秸秆在固定刀45和移动刀46之间出现弯折,从而无法切割的问题出现)。
53.作为本发明的进一步方案,驱动杆19上套设有用于保护万向机构的防护罩51,避免泥土进入万向机构内部影响万向机构的正常运行。
54.作为本发明的进一步方案,驱动机构包括转动设置在固定架10后端用于与外界进行动力连接的动力轴52,动力轴52下端通过齿轮组42传动连接到驱动盘41,动力轴52上端
通过与其啮合的齿轮棒传动连接到第一锥齿轮组25;使得动力轴52直接能同时通过齿轮组42驱动驱动盘41转动和第一锥齿轮组25转动,使得洗刷滚筒13的转动与摆动有规律可循,保持洋葱在洗刷滚筒13之间受到的挤压和传输一定,从而能使得洋葱的泥土搓刷更加稳定。
55.作为本发明的进一步方案,一种洋葱收获方法,该洋葱收获方法的具体步骤如下:
56.步骤一:将洋葱收获机的固定架10固定设置到带有升降装置的载具上,将载具的动力系统连接到设备的驱动机构中,从而使得洋葱收获机获得运行动力,通过载具移动将洋葱收获机携带运输到洋葱收获现场;
57.步骤二:通过载具升降将洋葱收获机释放到底面上,同时启动驱动机构,使得洋葱收获机获得动力,万向机构启动开始工作,驱动洗刷滚筒13开始转动,同时启动载具向前移动,将洋葱收获机前端插入泥土中;
58.步骤三:洋葱收获机前端插入泥土中后将土壤内部的洋葱铲起,使得泥土和洋葱沿着洗刷滚筒13斜坡向上移动,从而将洋葱向上传输,同时的洗刷滚筒13的转动使得螺旋的刷毛14转动,从而使得洋葱向上移动;
59.步骤四:洋葱沿着洗刷滚筒13倾斜向上移动,同时刷毛14与洋葱表面的泥土进行摩擦,使得洋葱在洗刷滚筒13之间滚动,同时使得泥土从洗刷滚筒13之间间隙掉落到设备下端,从而完成对洋葱进行土壤分离且同时进行运输的效果;
60.步骤五:在洋葱进行土壤分离的过程中往复机构工作驱动洗刷滚筒13进行间歇的相互靠近和远离,从而使得洋葱在洗刷滚筒13之间的刷毛14之间形成挤压和释放的过程,从而进行高效的泥土搓刷,从而进行高效分离土壤的过程;
61.步骤六:在驱动洗刷滚筒13进行间歇的相互靠近和远离时,摇摆机构还驱动移动刀46在支架杆12上往复滑动,从而使得移动刀46和固定刀45产生错位,从而完成洋葱秸秆的切除工作,土壤分离完成后的洋葱被传输到洗刷滚筒13后端上方,再受到自身重力掉落到现有的收集斗中,从而完成洋葱的整体收获。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1