一种自适应智能无墒犁及方法和整地机械
1.本发明属于农业机械设备技术领域,涉及一种自适应智能无墒犁及方法和整地机械。
背景技术:
2.目前的农业机械化作业已基本普及,但应用范围最广的仍是单一的机械作业方式,即一种农业机械只能实现一种功能,如铧式犁、旋耕机、播种机等农业机械,这样一来农机机具在土壤上反复碾压,会导致土壤硬化且耗能较大、浪费时间。
3.传统的拖拉机上的动力输出轴带动齿轮箱进行旋耕作业,耗能大、噪声大,且齿轮易损坏。农业机械在耕作过程中易产生振动,其振动会产生较多的负面影响:对人而言,震动产生巨大的噪音,吵闹人的耳朵,长年累月会使得人听力下降,对农机具本身而言,震动对整体及其各个零部件会导致松动等趋势,从而降低农机具使用寿命。多数现有旋耕机没有设置专门的减震装置,少数采用简易式的减震臂配合单个弹簧的结构来达到减震的目的,此种技术减震效果较差,抗压和回复能力较弱,使用寿命低。
技术实现要素:
4.针对上述技术问题,本发明的一个方式的目的之一是提供一种自适应智能无墒犁,利用深耕、旋耕和镇压一体化,一机多能,解决了单一的机械作业方式的缺陷,提高了工作效率,节省了作业时间,并减少了对农田的碾压;本发明的一个方式的目的之一是利用磁力齿轮中间传动,降低能耗和噪声,减少齿轮损耗,磁力齿轮传动无接触、无摩擦,提高了齿轮的使用期限,利用伺服电机带动磁力齿轮转动,解决了主轴旋转带动刀具转动耗能大的缺陷,使用电能带动刀轴旋转,更加节能;本发明的一个方式的目的之一是利用自适应磁流变液减振器降低机具的振动,减少对农机机具的惯性冲击,提高农机机具的使用寿命;本发明的一个方式的目的之一是利用自适应控制系统,磁流变液在变化的磁场作用下产生磁流变效应,转变为类固体的状态,从而使挤压屈服应力相应改变以应对不同强度的振动,能够根据振动的瞬时变化及时做出相应的自适应调整,大大提高了农机机具的使用寿命。
5.本发明的一个方式的目的之一是提供一种所述的自适应智能无墒犁的控制方法,本发明的一个方式的目的之一是提供一种整地机械,所述整地机械包括所述的自适应智能无墒犁,所述自适应智能无墒犁根据所述方法控制。
6.注意,这些目的的记载并不妨碍其他目的的存在。本发明的一个方式并不需要实现所有上述目的。可以从说明书、附图、权利要求书的记载中抽取上述目的以外的目的。
7.本发明的技术方案是:
8.一种自适应智能无墒犁,包括深耕犁装置、电动旋耕装置、镇压装置、自适应磁流变阻尼装置和控制单元;
9.所述电动旋耕装置设置在深耕犁装置的后方,所述镇压装置设置在电动旋耕装置的后方,所述电动旋耕装置包括旋耕部件、驱动机构和压电陶瓷,驱动机构与旋耕部件连
接,压电陶瓷和自适应磁流变阻尼装置分别安装在旋耕部件上,且压电陶瓷和自适应磁流变阻尼装置连接;
10.所述控制单元分别与驱动机构和压电陶瓷连接。
11.上述方案中,所述深耕犁装置包括深耕犁主框架,深耕犁主框架呈对称的“倒梯形”,所述深耕犁主框架的前横梁和后横梁分别设有多个犁体,所述后横梁上的犁体与前横梁上的犁体空间上相间分布,所述深耕犁体的翻耕方向均朝向内部。
12.进一步的,还设有连接杆和第一连接耳,所述第一连接耳设置在后横梁后侧,第一连接耳与电动旋耕装置前部相连接;连接杆的一端与深耕犁主框架连接,另一端与电动旋耕装置上部连接。
13.上述方案中,所述电动旋耕装置的旋耕部件包括旋耕机架、磁力齿轮传动箱、旋耕刀轴、旋耕刀具和松土铲;
14.所述旋耕机架通过连接杆与深耕主框架上部相连接,所述驱动机构安装在旋耕机架上,所述磁力齿轮传动箱位于旋耕机架中间,驱动机构与磁力齿轮传动箱的动力输入端连接,磁力齿轮传动箱的动力输出端与旋耕刀轴连接,所述旋耕刀轴的两端分别通过固定连接座与旋耕机架的两侧连接,旋耕刀轴排布有若干旋耕刀具,所述松土铲安装在磁力齿轮传动箱的前端,所述旋耕机架后部设有挡土板。
15.进一步的,所述磁力齿轮传动箱包括磁力主动轮和磁力从动轮;所述磁力从动轮位于磁力主动轮下方,磁力主动轮与驱动机构连接,磁力从动轮与旋耕刀轴连接,所述磁力主动轮和磁力从动轮的轴处于平行状态,磁力主动轮和磁力从动轮在静止状态时,s、n极相互对应,当驱动机构带动磁力主动轮旋转时,磁力主动轮的磁极位置发生改变,利用相邻异性磁极,推动磁力从动轮进行旋转。
16.进一步的,所述旋耕机架后侧设有与镇压装置连接的第二连接耳。
17.上述方案中,所述自适应磁流变减振装置为筒状结构,分为对称分布的上下两部分,上下两部分均分别包括固定外壳、磁流变液、励磁线圈和储液空腔,自适应磁流变减振装置安装在磁力从动轮两侧,所述固定外壳连接安装在磁力齿轮传动箱内壁上,固定外壳内设有半圆环形储液空腔,所述磁流变液储存在储液空腔内,所述励磁线圈环绕在半圆环形储液空腔外侧,励磁线圈与压电陶瓷连接;上下两部分合并后中间为圆环,圆环套在旋耕刀轴上。
18.一种根据所述的自适应智能无墒犁的控制方法,包括以下步骤:
19.所述压电陶瓷安装在旋耕机架上,所述压电陶瓷将振动机械能转换为电能,通过连接线将电流输送给自适应磁流变减振装置中的励磁线圈和控制单元,当旋耕机架的振动幅度越大,励磁线圈中的电流也就越大,磁场强度增大,磁流变液的粘性增加,从牛顿流体转换为类固体状态;当旋耕机架的振动幅度减小时,励磁线圈中的电流也就越小,磁场强度减小,磁流变液的粘性降低,从类固体状态转换为牛顿流体,磁流变液在固态-液态之间瞬间转换,使得振动得以自动调节;
20.所述控制单元处理分析压电陶瓷发出的信号,当旋耕机架的振动幅度超过设定值时,控制单元控制降低驱动机构的驱动速度,从而降低旋转刀轴的速度,减小振动;
21.当耕作作业完成时,控制单元控制驱动机构的驱动速度,使得电动旋耕装置停止运转,减小对农机机具的惯性冲击。
22.一种整地机械,包括所述的自适应智能无墒犁,以及农机机具;所述深耕犁装置通过三点悬挂装置与农机机具连接,位于农机机具的后方。
23.一种整地机械,包括所述的自适应智能无墒犁,以及农机机具;所述深耕犁装置通过三点悬挂装置与农机机具连接,位于农机机具的后方;所述自适应智能无墒犁根据权利要求9所述的方法控制。
24.与现有技术相比,本发明的有益效果是:根据本发明的一个方式,可以利用深耕、旋耕和镇压一体化,一机多能,解决了单一的机械作业方式的缺陷,提高了工作效率,节省了作业时间,并减少了对农田的碾压;根据本发明的一个方式,可以利用磁力齿轮中间传动,降低能耗和噪声,减少齿轮损耗,磁力齿轮传动无接触、无摩擦,提高了齿轮的使用期限,利用伺服电机带动磁力齿轮转动,解决了主轴旋转带动刀具转动耗能大的缺陷,使用电能带动刀轴旋转,更加节能;根据本发明的一个方式,可以利用自适应磁流变液减振器降低机具的振动,减少对农机机具的惯性冲击,提高农机机具的使用寿命;根据本发明的一个方式,可以利用自适应控制系统,磁流变液在变化的磁场作用下产生磁流变效应,转变为类固体的状态,从而使挤压屈服应力相应改变以应对不同强度的振动,能够根据振动的瞬时变化及时做出相应的自适应调整,大大提高了农机机具的使用寿命。
25.注意,这些效果的记载不妨碍其他效果的存在。本发明的一个方式并不一定必须具有所有上述效果。可以从说明书、附图、权利要求书等的记载显而易见地看出并抽出上述以外的效果。
附图说明
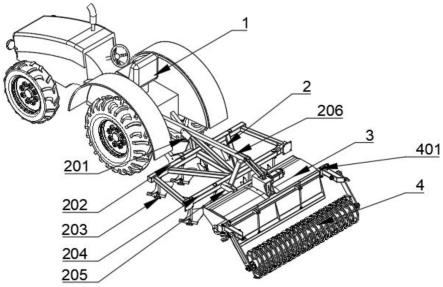
26.图1为本发明一实施方式的整体结构示意图;
27.图2为本发明一实施方式的深耕犁装置的结构示意图;
28.图3为本发明一实施方式的电动旋耕装置的结构示意图;
29.图4为本发明一实施方式的整体主机架的振型示意图;
30.图5为本发明一实施方式的自适应磁流变阻尼装置的侧面剖视图;
31.图6为本发明一实施方式的控制系统原理图。
32.附图标记:
33.1-农机机具;2-深耕犁装置;201-三点悬挂装置;202-前横梁;203-犁体;204-后横梁;205-第一连接耳;206-连接杆;3-电动旋耕装置;301-磁力齿轮传动箱;302-磁力主动轮;303-磁力从动轮;304-旋耕机架;305-旋耕刀轴;306-旋耕刀具;307-松土铲;308-挡土板;309-固定连接座;310-压电陶瓷垫片;311-压电陶瓷;312-伺服电机;4-镇压装置;401-第二连接耳;5-自适应磁流变阻尼装置;501-固定外壳;502-励磁线圈;503-磁流变液;504-储液空腔。
具体实施方式
34.下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
35.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“前”、“后”、“左”、“右”、“上”、“下”、“轴向”、“径向”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
36.在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
37.实施例1
38.图1所示为本发明所述一种自适应智能无墒犁的较佳实施方式,包括深耕犁装置2、电动旋耕装置3、镇压装置4、自适应磁流变阻尼装置5和控制单元;
39.所述电动旋耕装置3设置在深耕犁装置2的后方,所述镇压装置4设置在电动旋耕装置3的后方,所述电动旋耕装置3包括旋耕部件、驱动机构和压电陶瓷311,驱动机构与旋耕部件连接,压电陶瓷311和自适应磁流变阻尼装置5分别安装在旋耕部件上,且压电陶瓷311和自适应磁流变阻尼装置5连接;
40.所述控制单元分别与驱动机构和压电陶瓷311连接。
41.如图2所示,所述深耕犁装置2包括深耕犁主框架,深耕犁主框架呈对称的“倒梯形”,所述深耕犁主框架的前横梁202和后横梁204分别设有多个犁体203,所述后横梁204上的犁体203与前横梁202上的犁体203空间上相间分布,所述深耕犁体203的翻耕方向均朝向内部。
42.根据本实施例,优选的,所述深耕犁主框架上设有八个犁体203,前横梁202上安装四个犁体203,后横梁上也安装有四个犁体203。
43.根据本实施例,优选的,还设有连接杆206和第一连接耳205,所述第一连接耳205设置在后横梁204后侧,第一连接耳205与电动旋耕装置3前部相连接;连接杆206的一端与深耕犁主框架连接,另一端与电动旋耕装置3上部连接。
44.如图3所示,根据本实施例,优选的,所述电动旋耕装置3的旋耕部件包括旋耕机架304、磁力齿轮传动箱301、旋耕刀轴305、旋耕刀具306和松土铲307;所述旋耕机架304通过连接杆206与深耕主框架上部相连接,所述驱动机构安装在旋耕机架304上,所述磁力齿轮传动箱301位于旋耕机架304中间,利用磁力齿轮中间传动,磁力齿轮传动无接触、无摩擦,提高了齿轮的使用寿命,驱动机构与磁力齿轮传动箱301的动力输入端连接,磁力齿轮传动箱301的动力输出端与旋耕刀轴305连接,所述旋耕刀轴305的两端分别通过固定连接座309与旋耕机架304的两侧连接,旋耕刀轴305排布有若干旋耕刀具306,所述松土铲307安装在磁力齿轮传动箱301的前端,所述旋耕机架304后部通过连接杆连接挡土板308。
45.根据本实施例,优选的,所述驱动机构为伺服电机312,伺服电机312与磁力齿轮传动箱301连接。
46.根据本实施例,优选的,所述磁力齿轮传动箱301包括磁力主动轮302和磁力从动轮303;所述磁力从动轮303位于磁力主动轮302下方,磁力主动轮302与伺服电机312连接,磁力从动轮303与旋耕刀轴305键连接,所述磁力主动轮302和磁力从动轮303的轴处于平行状态,磁力主动轮302和磁力从动轮303在静止状态时,s、n极相互对应,当驱动机构带动磁力主动轮302旋转时,磁力主动轮302的磁极位置发生改变,利用相邻异性磁极,推动磁力从动轮303进行旋转。磁力轮中含有钕铁硼环形多极磁环,内部支架为铝合金支架。利用伺服电机312带动磁力齿轮转动,解决了主轴旋转带动刀具转动耗能大的缺陷,使用电能带动刀轴旋转,更加节能。
47.根据本实施例,优选的,所述旋耕机架304后侧设有与镇压装置4连接的第二连接耳401。
48.所述压电陶瓷311安装在旋耕机架304上,且与机架304之间设置有压电陶瓷垫片310,压电陶瓷垫片310对压电陶瓷311起到保护的作用。
49.所述磁力齿轮传动箱301的磁力齿轮传动是通过强磁体磁场来传递动力的一种非接触式传动装置,减少噪声、振动、摩擦损耗以及润滑等问题,而且能够实现输入与输出之间的物理隔离。
50.如图4所示为本发明装置的整体主机架的振型示意图,将由深耕犁主框架、旋耕机架304构成的主机架进行模态分析,得出整体框架的振动模型。为简化运算,在solidworks中建立整体机架模型,并将整体机架模型导入ansys中,分别限制坐标轴方向形变,固定三点悬挂装置201,在不同的振动环境下进行模态分析,得到整体机架的振动频率峰值,如图4所示,振动峰值在旋耕机架304上,将压电陶瓷311连接在振动峰值处。
51.如图5所示,根据本实施例,优选的,所述自适应磁流变减振装置5为筒状结构,分为对称分布的上下两部分,上下两部分均分别包括固定外壳501、磁流变液503、励磁线圈502和储液空腔504,自适应磁流变减振装置5安装在磁力从动轮303两侧,所述固定外壳501连接安装在磁力齿轮传动箱301内壁上,固定外壳501内设有半圆环形储液空腔504,所述磁流变液503储存在储液空腔504内,所述励磁线圈502环绕在半圆环形储液空腔504外侧,励磁线圈502与压电陶瓷311连接;上下两部分合并后中间为圆环,圆环套在旋耕刀轴305上。自适应磁流变减振装置5近似圆形的包围在旋耕刀轴305外侧,可有效地抑制旋耕刀轴305在高速运转下的振动。所述压电陶瓷311通过连接线与励磁线圈502电性连接,通过机架自身的振动变化进而控制电流大小,以此改变磁场的强弱,可达到自适应改变磁流变阻尼装置5的阻尼大小,从而有效地抑制振动。
52.自适应磁流变减振装置5的磁流变液503是一种通过磁场可控的智能材料。通常情况下,该材料是由微米级的磁性颗粒含铁钴银元素的颗粒或其合金组成的,以及由非磁性载液水或各种油类物质和添加剂构成。在外加磁场为零的情况下,磁流变液表现为牛顿流体特性;施加外部磁场后,磁流变液迅速转变为类固体物质,粘度急剧增加,并且这种转变是可逆的。当撤去磁场后,磁流变液由类固体变为流体。由于磁流变液在磁场作用下的流变是瞬间的、可逆的、而且其流变后的挤压屈服强度与磁场强度具有稳定的对应关系。
53.实施例2
54.一种包括实施例1所述自适应智能无墒犁的控制方法,具有实施例1的有益效果,此处不再赘述,该方法包括以下步骤:
55.如图6所示,所述压电陶瓷311安装在旋耕机架304上,所述压电陶瓷311将振动机械能转换为电能,通过连接线将电流输送给自适应磁流变减振装置5中的励磁线圈502和控制单元,当旋耕机架304的振动幅度越大,励磁线圈502中的电流也就越大,磁场强度增大,磁流变液503的粘性增加,从牛顿流体转换为类固体状态;当旋耕机架304的振动幅度减小时,励磁线圈502中的电流也就越小,磁场强度减小,磁流变液503的粘性降低,从类固体状态转换为牛顿流体,磁流变液503在固态-液态之间瞬间转换,所产生的阻尼力主要来自动压效应,所产生的挤压应力抑制刀轴高速运行下的振动,使得振动得以自动调节。
56.所述控制单元处理分析压电陶瓷311发出的信号,当旋耕机架304的振动幅度超过设定值时,控制单元控制降低伺服电机312的转速,从而降低旋转刀轴305的速度,减小振动;
57.当耕作作业完成时,控制单元控制伺服电机312的转速,使得电动旋耕装置3停止运转,减小对农机机具1的惯性冲击。
58.实施例3
59.一种整地机械,包括实施例1所述的自适应智能无墒犁,以及农机机具1;所述深耕犁装置2通过三点悬挂装置201与农机机具1连接,位于农机机具1的后方;所述自适应智能无墒犁根据实施例2所述方法控制。
60.一种整地机械的工作过程:
61.在整机安装完成后,深耕犁机构2后方的电动旋耕装置3开始工作,从地面旋转至地下,农机机具1开始带动整机向前驶进,随着农机机具1的行进,深耕犁机构2对土壤进行深耕,伺服电机312带动磁力齿轮进行工作,随着旋耕刀轴305的速度不断提高,旋耕机架304的振幅也越来越大,压电陶瓷311检测到旋耕机架304的振动,将机械能转化成电能,将电流发送到励磁线圈502中,以此改变磁场大小,磁流变液503的粘性发生变化,进而改变阻尼大小,所产生的挤压应力抑制刀轴305高速运行下的振动,使得振动得以自动调节,电动旋耕装置3后方的镇压机构4对土壤进行镇压,达到上平下实的效果,在旋耕机构高速旋转中,控制单元mcu处理分析压电陶瓷311发出的信号,当机架的振动幅度超过设定值时,mcu控制降低伺服电机312的转速,从而降低旋转刀轴305的速度,减小振动,当耕作作业完成时,驾驶员通过仪表盘操控mcu,通过mcu控制伺服电机312的转速,使得电动旋耕装置2停止运转,减小对农机机具1的惯性冲击。通过上述过程,可达到一机多用,一次作业后可直接进行播种的效果,省时节能。
62.本发明所述自适应智能无墒犁可以利用深耕、旋耕和镇压一体化,一机多能,解决了单一的机械作业方式的缺陷,提高了工作效率,节省了作业时间,并减少了对农田的碾压;利用磁力齿轮中间传动,降低能耗和噪声,减少齿轮损耗,磁力齿轮传动无接触、无摩擦,提高了齿轮的使用寿命,利用伺服电机带动磁力齿轮转动,解决了主轴旋转带动刀具转动耗能大的缺陷,使用电能带动刀轴旋转,更加节能;利用自适应磁流变液减振器降低机具的振动,减少对农机机具的惯性冲击,提高农机机具的使用寿命;利用自适应控制方法,磁流变液在变化的磁场作用下产生磁流变效应,转变为类固体的状态,从而使挤压屈服应力相应改变以应对不同强度的振动,能够根据振动的瞬时变化及时做出相应的自适应调整,大大提高了农机机具的使用寿命。
63.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示
例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
64.尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在不脱离本发明的原理和宗旨的情况下在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1