一种感应式电驱动机械型驱鸟装置的制作方法
1.本技术涉及驱鸟装置领域,更具体地,涉及一种感应式电驱动机械型驱鸟装置。
背景技术:
2.驱鸟装置是一种用于农场、果园、风力发电厂和军民用机场等一切防止有害鸟类侵入自己领地的装置,其主要通过听觉恐吓、视觉震慑、直接捕杀、化学、生态或雷达预警等一切手段来对靠近领地的鸟类进行驱赶工作,进而防止鸟类危害自己的劳动成果或设备安全。
3.目前市场上的驱鸟装置主要分为风车型驱鸟器和超声波驱鸟器,其中风车型驱鸟器主要是通过外部的自然风使得风车上的反光镜进行转动,继而通过光线对鸟类进行驱赶工作,但是该方式,会在无风的环境下,使得风车无法进行转动,故无法对鸟类进行驱赶工作,而超声波驱鸟器则是通过发射超声波的方式对鸟类进行驱赶工作,但是该方式,需要使用者一直运行超声波驱鸟器,故需要消耗大量的能源,且还会对四周的环境造成一定的影响,因此本技术提供了一种感应式电驱动机械型驱鸟装置。
技术实现要素:
4.鉴于上述问题,本技术提出了一种感应式电驱动机械型驱鸟装置,具备自动输送板材和多位压紧的优点,解决了上述所阐述出来的问题。
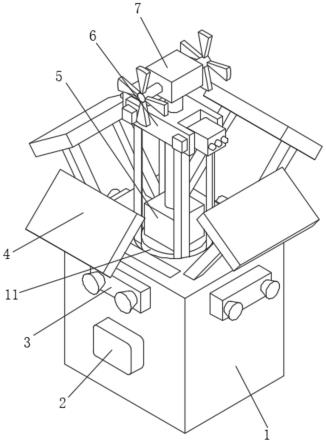
5.本技术提供的一种感应式电驱动机械型驱鸟装置,包括电控箱、第一电源、第二电源,所述电控箱前端的底部固定连接有远程传输器,所述电控箱四侧的顶部均固定连接有声波驱鸟仪,所述电控箱顶部的四周均固定连接有自然充电装置,所述电控箱顶部的中心固定连接有旋转装置,所述旋转装置外表面的顶部固定连接有感应装置,所述旋转装置的顶部固定连接有光线驱鸟仪,所述电控箱顶部中心的外表面开设有圈槽。
6.优选的,所述自然充电装置包括有支撑板,所述支撑板远离电控箱中心的一侧固定连接有光伏板,所述声波驱鸟仪包括有发声器,所述发声器远离旋转装置的一侧固定连接有发声头。
7.优选的,所述旋转装置包括有第一防护板,所述第一防护板的内部固定连接有第一电机,所述第一电机的输出端固定连接有第一旋转杆,所述第一电机的外表面大小小于圈槽的内表面大小。
8.优选的,所述光线驱鸟仪包括有第二防护板,所述第二防护板的内部固定连接有双头电机,所述双头电机的前端和后端均固定连接有第三旋转杆,所述第三旋转杆远离双头电机一侧的外表面固定连接有反光镜板。
9.优选的,所述感应装置包括有活动板,所述活动板的两侧均开设有活动槽,所述活动板前端的两侧均固定连接有第二电机,所述第二电机的输出端固定连接有第二旋转杆,所述第二旋转杆的外表面固定连接有红外线传感器,所述活动板底部两侧的前端和后端均固定连接有功能板,所述功能板底部的外表面与圈槽的内表面相适配。
10.优选的,所述第一电源和光伏板与第二电源为并联连接,所述第一电机、第二电机、红外线传感器和远程传输器与第二电源为串联连接,所述第一电机、发声器和双头电机与第二电源为并联连接。
11.优选的,所述红外线传感器包括有传感单元、第三信号处理单元、信号分离单元、第一信号发送单元、第二信号发送单元、第三信号发送单元,所述信号分离单元的信号分别与第一信号发送单元、第二信号发送单元和第三信号发送单元的信号相通,且信号分离单元控制第一信号发送单元、第二信号发送单元和第三信号发送单元,所述第三信号处理单元接收传感单元的信号,且第三信号处理单元的信号与信号分离单元的信号相通。
12.优选的,所述发声器包括有第二信号接收单元、第一电路启闭单元、第二信号处理单元,所述第二信号接收单元接收第一信号发送单元的信号,所述第二信号接收单元的信号与第一电路启闭单元相通,所述第一电路启闭单元控制第二信号处理单元的信号,所述双头电机包括有第三信号接收单元、第二电路启闭单元、第四信号处理单元,所述第三信号接收单元的信号与第三信号发送单元的信号相连接,所述第三信号接收单元控制第二电路启闭单元的信号,所述第四信号处理单元接收第二电路启闭单元的信号。
13.优选的,所述远程传输器包括有第一信号接收单元、第一信号处理单元、远程传输单元,所述第一信号接收单元的信号分别与第二信号发送单元、第二信号处理单元和第四信号处理单元的信号相连接,所述第一信号处理单元接收第一信号接收单元的信号,且第一信号处理单元控制远程传输单元的信号。
14.与现有技术对比,本发明具备以下有益效果:
15.1、该感应式电驱动机械型驱鸟装置,通过红外线传感器的使用,可以对外部物体进行红外线感应工作,继而可以观测设备外部是否有鸟类活动,而第二电机的使用,可以使得红外线传感器所照射的光线进行弧形移动,继而提高了红外线传感器的检测范围,继而提高了设备的感应性,且第一电机的使用,可以使得活动板进行转动,继而使得红外线传感器进行水平转动,从而使得红外线传感器所照射的光线进行水平转动,该方式防止设备出现检测盲区,进一步提高了设备的感应性。
16.2、该感应式电驱动机械型驱鸟装置,通过双头电机的使用,可以使得第三旋转杆带动反光镜板进行转动,继而使得旋转中的反光镜板对设备外部的鸟类进行反光驱鸟工作,其中第一电机的使用,可以使得反光镜板进行水平转动,继而使得反光镜板可以根据鸟类位置进行驱鸟工作,从而提高了设备的驱鸟效率,而发声器和发声头的配合使用,可以释放声音,继而对鸟类进行二次驱赶工作,进一步提高了设备的驱鸟效率,且通过远程传输器的使用,可以将设备的驱鸟过程进行远程传输,继而使得使用者可以进行实时监测工作。
附图说明
17.为了更清楚地说明本技术实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
18.图1本发明结构主体图;
19.图2本发明结构顶部至感应装置中心剖视图;
20.图3本发明结构正面剖视图;
21.图4本发明结构顶部至声波驱鸟仪中心剖视图;
22.图5本发明结构右侧剖视图;
23.图6本发明结构电路图;
24.图7本发明结构信号传输图。
25.图中:1、电控箱;11、圈槽;2、远程传输器;21、第一信号接收单元;22、第一信号处理单元;23、远程传输单元;3、声波驱鸟仪;31、发声器;311、第二信号接收单元;312、第一电路启闭单元;313、第二信号处理单元;32、发声头;4、自然充电装置;41、支撑板;42、光伏板;5、旋转装置;51、第一防护板;52、第一电机;53、第一旋转杆;6、感应装置;61、活动板;62、第二电机;63、第二旋转杆;64、红外线传感器;641、传感单元;642、第三信号处理单元;643、信号分离单元;644、第一信号发送单元;645、第二信号发送单元;646、第三信号发送单元;65、功能板;7、光线驱鸟仪;71、第二防护板;72、双头电机;721、第三信号接收单元;722、第二电路启闭单元;723、第四信号处理单元;73、第三旋转杆;74、反光镜板;8、第一电源;9、第二电源。
具体实施方式
26.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
27.请参阅图1、图2、图3、图4和图5,一种感应式电驱动机械型驱鸟装置,包括电控箱1、第一电源8、第二电源9,所述电控箱1前端的底部固定连接有远程传输器2,所述电控箱1四侧的顶部均固定连接有声波驱鸟仪3,所述电控箱1顶部的四周均固定连接有自然充电装置4,所述自然充电装置4包括有支撑板41,支撑板41的使用,可以对光伏板42进行支撑工作,所述支撑板41远离电控箱1中心的一侧固定连接有光伏板42,光伏板42的使用,可以将外部的光能转换为电能,且位于电控箱1四周的光伏板42,使得光伏板42可以对各个方向的太阳光进行吸收工作,所述声波驱鸟仪3包括有发声器31,发声器31的运行,使得发声头32可以发生声音,继而可以对设备四周的鸟类进行驱赶工作,所述发声器31远离旋转装置5的一侧固定连接有发声头32,所述电控箱1顶部的中心固定连接有旋转装置5,所述旋转装置5包括有第一防护板51,第一防护板51的使用,可以对第一电机52进行防护工作,所述第一防护板51的内部固定连接有第一电机52,运行第一电机52,使得第一旋转杆53进行转动,继而使得活动板61和第二防护板71进行转动,所述第一电机52的输出端固定连接有第一旋转杆53,所述第一电机52的外表面大小小于圈槽11的内表面大小。
28.其中所述旋转装置5外表面的顶部固定连接有感应装置6,所述感应装置6包括有活动板61,活动板61的转动,使得红外线传感器64进行水平转动,继而使得红外线传感器64所发射的红外线光线处于无死角状态,所述活动板61的两侧均开设有活动槽,所述活动板61前端的两侧均固定连接有第二电机62,运行第二电机62,使得第二旋转杆63可以进行转动,继而使得红外线传感器64进行转动,从而使得红外线传感器64远离活动板61的一侧进行弧形移动,所述第二电机62的输出端固定连接有第二旋转杆63,所述第二旋转杆63的外
表面固定连接有红外线传感器64,红外线传感器64的使用,可以发射红外线感应光,所述活动板61底部两侧的前端和后端均固定连接有功能板65,功能板65的使用,可以对活动板61进行支撑工作,继而防止活动板61出现偏移现象,所述功能板65底部的外表面与圈槽11的内表面相适配,所述旋转装置5的顶部固定连接有光线驱鸟仪7,所述光线驱鸟仪7包括有第二防护板71,第二防护板71的使用,可以对双头电机72进行防护工作,所述第二防护板71的内部固定连接有双头电机72,双头电机72的运行,使得第三旋转杆73带动反光镜板74进行转动,继而使得反光镜板74上的反光镜可以对鸟类进行光线驱赶工作,所述双头电机72的前端和后端均固定连接有第三旋转杆73,所述第三旋转杆73远离双头电机72一侧的外表面固定连接有反光镜板74,所述电控箱1顶部中心的外表面开设有圈槽11。
29.请参阅图6和图7,所述第一电源8和光伏板42与第二电源9为并联连接,与第二电源9为并联连接的第一电源8和光伏板42,使得第一电源8和光伏板42均可以对第二电源9进行充电工作,所述第一电机52、第二电机62、红外线传感器64和远程传输器2与第二电源9为串联连接,为串联连接的第一电机52、第二电机62、红外线传感器64和远程传输器2,会在第一电机52运行时,使得第二电机62、红外线传感器64和远程传输器2开始运行,所述第一电机52、发声器31和双头电机72与第二电源9为并联连接,与第二电源9为并联连接的第一电机52、发声器31和双头电机72,使得发声器31和双头电机72在停止运行时,不会对第一电机52的线路造成影响。
30.其中所述红外线传感器64包括有传感单元641、第三信号处理单元642、信号分离单元643、第一信号发送单元644、第二信号发送单元645、第三信号发送单元646,信号分离单元643在接收到第三信号处理单元642的信号后,会对第三信号处理单元642的信号进行处理工作,继而发送驱鸟信号,所述信号分离单元643的信号分别与第一信号发送单元644、第二信号发送单元645和第三信号发送单元646的信号相通,与第一信号发送单元644、第二信号发送单元645和第三信号发送单元646信号相通的信号分离单元643,可以将处理后的信号分别传输至第一信号发送单元644、第二信号发送单元645和第三信号发送单元646处,且信号分离单元643控制第一信号发送单元644、第二信号发送单元645和第三信号发送单元646,所述第三信号处理单元642接收传感单元641的信号,第三信号处理单元642的使用,可以感应传感单元641所传输的信号,继而发送至信号分离单元643处,且第三信号处理单元642的信号与信号分离单元643的信号相通,所述发声器31包括有第二信号接收单元311、第一电路启闭单元312、第二信号处理单元313,所述第二信号接收单元311接收第一信号发送单元644的信号,第二信号接收单元311在接收到第一信号发送单元644所传输的驱鸟信号时,会使得第一电路启闭单元312进行电路开启工作,然后再通过第二信号处理单元313将处理信号发射至第一信号接收单元21处,所述第二信号接收单元311的信号与第一电路启闭单元312相通,所述第一电路启闭单元312控制第二信号处理单元313的信号,所述双头电机72包括有第三信号接收单元721、第二电路启闭单元722、第四信号处理单元723,第三信号接收单元721在接收到第三信号发送单元646所传输的驱鸟信号时,会使得第二电路启闭单元722进行电路开启工作,然后再通过第四信号处理单元723将处理信号发射至第一信号接收单元21处,所述第三信号接收单元721的信号与第三信号发送单元646的信号相连接,所述第三信号接收单元721控制第二电路启闭单元722的信号,所述第四信号处理单元723接收第二电路启闭单元722的信号,所述远程传输器2包括有第一信号接收单元21、第一
信号处理单元22、远程传输单元23,第一信号处理单元22可以对第一信号接收单元21所传输的信号进行处理,然后通过远程传输单元23远程传输至使用者的电子设备处,进而使得使用者可以进行远程监控工作,所述第一信号接收单元21的信号分别与第二信号发送单元645、第二信号处理单元313和第四信号处理单元723的信号相连接,所述第一信号处理单元22接收第一信号接收单元21的信号,且第一信号处理单元22控制远程传输单元23的信号。
31.综上,该设备首先需要第二电源9对第一电源8进行充电,继而使得第一电源8可以对第一电机52、第二电机62、红外线传感器64、远程传输器2、发声器31和双头电机72进行供电工作,然后通过光伏板42将外部的光能转换为电能,继而通过光伏板42对第一电源8进行持续供电工作,其中第一电机52在接收到电流后,会使得第一旋转杆53带动活动板61和第二防护板71进行转动,继而使得红外线传感器64和反光镜板74进行水平转动,而第二电机62可以使得第二旋转杆63带动红外线传感器64进行转动,继而使得红外线传感器64的输出端进行弧形移动,且红外线传感器64在接收到电流后,可以发射红外线光线,继而对设备外部进行感应工作,在这个过程中,当红外线传感器64感应到鸟类后,会通过第三信号处理单元642将驱鸟信号传输至信号分离单元643处,然后通过信号分离单元643将信号分别传输至第一信号发送单元644、第二信号发送单元645和第三信号发送单元646处,其中第一信号发送单元644可以将信号传输至第二信号接收单元311处,继而通过第一电路启闭单元312使得发声头32对外部进行声波驱鸟工作,而第三信号发送单元646可以将信号传输至第三信号接收单元721处,继而通过第二电路启闭单元722使得双头电机72开始运行,从而使得反光镜板74进行转动,进而通过反光镜板74上的反光板对鸟类进行驱鸟工作,且第一信号发送单元644、第二信号处理单元313和第四信号处理单元723均会将运行信号传输至第一信号接收单元21处,进而通过远程传输单元23将运行过程远程传输至使用者的电子仪器处,从而使得使用者可以进行远程观测工作。
32.最后应说明的是:以上实施例仅用以说明本技术的技术方案,而非对其限制;尽管参照前述实施例对本技术进行了详细的说明,本领域的普通技术人员当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不驱使相应技术方案的本质脱离本技术各实施例技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1