一种基于监测数据采集处理的喷雾机对行施药定位方法与流程
1.本发明涉及一种喷雾机的施药控制方法,尤其是一种基于监测数据采集处理的喷雾机对行施药定位方法,属于应用信息技术的农机技术领域。
背景技术:
2.为提高东西走向日光温室栽培的瓜类(黄瓜、西瓜、甜瓜等)、茄果类(西红柿、辣椒、茄子等)等农作物的产量与品质,通常采用南北向垄作吊蔓栽培的种植模式,而垄间距、作物株距、行距等则根据不同作物品种及农艺要求存在较大差异。
3.目前日光温室栽培作物的病虫害防治主要采用人工背负电动喷雾器或手持高压喷管及喷枪进入到作物行间喷施农药的方式,不仅施药量大、防治效果差,并且作业人员劳动强度高、易农药中毒。虽然也有在日光温室沿保温墙一侧的硬化道路上铺设导轨,采用导轨式远程电动喷雾机边前行边行侧连续喷雾的作业方式,但该方式易出现以下两种无效喷雾情况:一是作物行间的空喷,造成大量药液流失;二是正对植株行中心线喷雾时,因植株叶片的遮挡作用导致大量农药雾滴无法穿透植株冠层而沉积于前端作物,造成前端作物药害,后端作物防治效果差。
4.检索可知,申请号为201410784600 .1的中国发明专利公开了一种采用激光测距传感器的风送式变量喷雾喷杆自动跟踪系统及控制方法,该技术方案采用激光测距传感器的变量喷雾机能够实时准确识别目标植株的有无、大小、形状和枝叶密度等信息,实现智能变量喷雾。虽然在喷雾过程中,喷杆自动跟踪系统的激光测距传感器获取植株的距离信息,根据植株距离信息,由控制系统控制固定喷嘴的可动喷杆自动进行位置调整,使其喷嘴保持在最佳的喷雾距离,从而达到减少雾滴漂移、增加雾滴穿透性和植株冠层沉积量的目的;但其跟踪测距目标为单个植株冠层,控制目标为喷雾距离,仅适用于果树等植株种植行距与株距较大、喷雾机能够进入植株行间进行单个植株对靶喷雾的场景。
5.此外,申请号为201910928041 .x的中国专利公开了苹果园喷雾机作业角度的控制方法,该技术方案在喷雾机的外周装设传感器,传感器可以实时测得喷雾机与所需释放药物的苹果树之间的距离;在喷雾机内设置有单片机,测距传感器与单片机电性连接,向单片机输入所需喷雾的苹果园模型,并根据测距传感器收集到的距离信息对树形轮廓进行模拟;根据不同的树形轮廓边界模糊后调整喷雾机的喷头角度,限定相应的喷雾轨迹,达到更佳的喷雾效果。不难看出,这种方法仅适用于行、株距相对固定的果园。
6.因此,现有技术均不适用于植株种植行距、株距较小且多变的场合。
技术实现要素:
7.本发明的目的在于:针对以上现技术存在的缺点,提出一种基于监测数据采集处理的喷雾机对行施药定位方法,从而满足植株种植行距、株距较小且多变的场合自动以最佳位置进行有效喷雾施药的需求。
8.申请人通过深入的试验研究认识到:喷雾机沿行排列方向行进作业过程中,理想
的喷雾作业方式是到达某一行的最佳喷雾位置时,暂停行进启动喷雾;之后停止喷雾继续行进到下一行的最佳喷雾位置,再暂停行进启动喷雾,如此循环,这样可以有效避免连续喷雾在行间的“空喷”。理论上,某一行的最佳喷雾位置并非喷雾中轴线与植株行中心线对齐的位置(因为此时邻近喷雾机的植株势必会遮挡同行后面的植株),而应位于喷雾机雾流中心方向应与植株行中心线偏移某一距离的位置,此时雾滴可穿透植株冠层沉积于植株行后端,显著改善射程内的雾滴分布均匀性。在此认识基础上,申请人经过反复试验摸索,提出了本发明基于监测数据采集处理的喷雾机对行施药定位方法基本技术方案:所述喷雾机包括安置在行走单元上的施药装置以及激光发射线与前行方向成预定夹角的激光测距传感器,所述施药装置的药箱通过泵阀装置通往离心雾化器;所述激光测距传感器的信号输出通过智能控制器件接施药装置执行器件的驱动受控端;所述智能控制器件按以下步骤进行施药定位:第一步、采集初始信号——从起始处采集反馈的激光信号初始测距值;第二步、判断将施药行——判断初始测距值是否突然变大,如是则进行下一步;否则返回第一步;第三步、获取第一有效值——从将施药行采集反馈的激光信号实际测距值,判断实际测距值是否处于第一预设区间,如否则继续采集判断;如是则将此次的实际测距值作为第一有效测距值,进行下一步;第四步、获取第二有效值——继续采集反馈的激光信号实际测距值,判断实际测距值是否处于小于第一预设区间的第二预设区间,如否则继续采集判断;如是则将此次的实际测距值作为第二有效测距值,进行下一步;第五步、确定施药点位——按以下算式计算理想施药点位:s=[(x1+l1cosα)+(x2+l2cosα)]/2式中:s ——起始处至理想施药点位的位移,mm;x1——起始处至第一次测得有效测距值的位移,mm;l1——第一次测得的有效测距值,mm;x2——起始处至第二次测得有效测距值的位移,mm;l2——第二次测得的有效测距值,mm;α——激光发射线与前行方向的预定夹角α;进行下一步;第六步、行进到位施药——待喷雾机从起始处行进至理想施药点位时驻车,启动施药装置按预定量施药。
[0009]
本发明的方法实质上跟踪测距目标为整行植株群体冠层,控制目标为离心雾化器喷出的雾流轴线与整行植株群体冠层侧面的垂直距离,喷雾方式为行侧喷雾(即离心雾化器的喷雾方向与整行植株群体冠层侧面平行),喷雾距离(即喷雾机离心雾化器与邻近植株的间距),喷雾机水平射程(即水平方向上喷雾机喷出药液达到的有效距离)则大于植株行的长度,从而使得雾滴覆盖于整行植株冠层。由于通过不平行安装激光测距传感器,对整行植株群体冠层的侧面进行多点同步在线测距采样及分析,对植株行进行快速识别与精确定位,并使喷雾机停车于植株行侧最佳喷雾位置(雾流方向与植株行中心线存在一定偏移量,
该偏移量由采样数据在线处理后自动设定)进行喷雾,因此可以有效避免行间空喷和正对植株行中心线的无效喷雾。本发明既适用于日光温室吊蔓栽培作物不同种植行距与株距,也适于在行侧过道进行整行喷雾,对植株种植行距、株距较小且多变具有良好的适应性。
[0010]
本发明进一步的完善是,所述预定夹角通过下式择定:当(a+c)/2b<2时,取75
°
,否则α取60
°
;式中:α——预定夹角;a——喷雾距离;b——行距;c——株距。
[0011]
本发明再进一步的完善是,所述激光测距传感器与所述离心雾化器的安装距离d满足:d>a/cosα。
[0012]
本发明更进一步的完善是,所述第一预设区间和第二预设区间分别为下式确定的第一最大测距有效值lmax1和最小测距有效值lmin以及第二最大测距有效值lmax2和最小测距有效值lmin之间的区间:lmin=(a-e/2)/sinα;lmax1=b/cosα;lmax2=l1+e/2sinα;式中:e——平均株宽。
[0013]
本发明还进一步的完善是,所述施药装置执行器件包括隔膜泵、离心雾化器和风机,所述药箱的输液管经流量计和隔膜泵后,通过电磁阀组接至离心雾化器;所述离心雾化器位于风筒上端,所述风筒下部安置风机。
[0014]
本发明又进一步的完善是,所述喷雾机的至少一侧装有水平的传感器导轨,所述传感器导轨与平动支架构成可锁定的移动副,所述平动支架和垂直旋转支架构成可锁定的铰链副,与激光测距传感器连接。
[0015]
总之本发明的有益效果是:既适用于日光温室吊蔓栽培作物不同种植行距与株距,也适于在行侧过道进行整行喷雾,对植株种植行距、株距较小且多变具有良好的适应性。
附图说明
[0016]
下面结合附图对本发明作进一步的说明。
[0017]
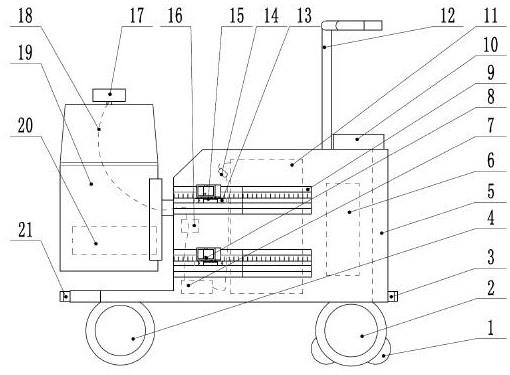
图1是采用本发明的推车式电动离心雾化喷雾机结构示意图。
[0018]
图2是图1中的传感器安装结构示意图。
[0019]
图3是本发明一个实施例的控制装置电路框图。
[0020]
图4是本发明一个实施例的控制流程图。
[0021]
图5是本发明一个实施例的识别与定位原理示意图。
[0022]
图中主要含:导向轮1、从动轮2、后避障传感器3、主驱动轮4、柜体5、电池6、微型隔膜泵7、激光测距传感器8、导轨9、hmi10、药箱11、把手12、平动支架13、流量计14、垂直旋转
支架15、流量电磁阀组16、离心雾化器17、水管18、风筒19、风机20、前避障传感器21、stm32主单片机22、 stm32从单片机23、车轮编码器24、直流电机驱动模块25、继电器组一26、无刷直流电机驱动器一27、无刷直流电机驱动器二28、步进电机驱动器29、无刷直流电机驱动器三30、继电器二31、风筒角度限位一32、风筒角度限位二33、减速电机34、离心雾化器电机35、风筒电机36、刹车39。
具体实施方式
[0023]
实施例一本实施例基于监测数据采集处理的喷雾机实际为如图1所示的推车式喷雾机,其前后分别装有从动轮2和主驱动轮4的行走单元上安置有施药装置,从动轮2带有导向轮1。行走单元邻近主驱动轮4和从动轮2处分别装有前避障传感器21和后避障传感器3。该施药装置的柜体5中安置药箱11。
[0024]
药箱11的输液管经流量计14和微型隔膜泵7后,通过用于控制药液通断的流量电磁阀组16以及水管18接至离心雾化器17。离心雾化器17位于风筒19上端,风筒19下部安置减速电机34带动的风机20。
[0025]
柜体5中内安置有含智能控制器件的控制装置以及向电机以及隔膜泵供电的电池6,柜体5上部装有把手12,并安放hmi10。柜体5的两侧分别装有上下两行水平的传感器导轨9,传感器导轨9装有可调节位置的激光测距传感器8。其具体结构如图2所示,传感器导轨9与平动支架13构成可锁定的移动副,平动支架13和垂直旋转支架15构成可锁定的铰链副,与激光测距传感器8连接。因此激光测距传感器8不仅前后位置可调,而且激光发射线与前行方向可以按需调定为预定夹角α。
[0026]
控制装置的电路框图参见图3,其构成容易理解,不展开详述,(具体电路可参见申请号201910928041 .x、202111094705 .0的中国专利),其中,流量计14、前避障传感器21、后避障传感器3的信号输出端分别接作为智能控制器件的主单片机22相应输入端,激光测距传感器8的信号输出通过从单片机23和主单片机22,接作为行走执行机构的主驱动轮4驱动受控端,以及作为施药装置执行器件的微型隔膜泵7、离心雾化器17、风机20各相应驱动受控端。当喷雾机以某一确定喷雾距离、在植株一侧沿行排列方向行进时,该智能控制器件按以下步骤进行施药定位(参见图4和图5):第一步、采集初始信号——从起始处采集反馈的激光信号初始测距值。
[0027]
第二步、判断将施药行——判断初始测距值是否突然变大,如是则说明将探测到施药行植株,进行下一步;否则说明仍未脱离起始处(或已施药行),返回第一步。
[0028]
第三步、获取第一有效值——从将施药行采集反馈的激光信号实际测距值,判断实际测距值是否处于第一预设区间,如否则说明测得的是株距间空挡或其它干扰的无效测距值,继续采集判断;如是则说明测得了施药行植株的第一有效测距值,进行下一步。
[0029]
第四步、获取第二有效值——继续采集反馈的激光信号实际测距值,判断实际测距值是否处于第二预设区间,如否则继续采集判断;如是则将此次的实际测距值作为第二有效测距值,进行下一步。
[0030]
第五步、确定施药点位——按以下算式计算理想施药点位:s=[(x1+l1cosα)+(x2+l2cosα)]/2
式中:s ——起始处至理想施药点位的位移,mm;x1——起始处至第一次测得有效测距值的位移,mm;l1——第一次测得的有效测距值,mm;x2——起始处至第二次测得有效测距值的位移,mm;l2——第二次测得的有效测距值,mm;α——激光发射线与前行方向的预定夹角α;进行下一步。
[0031]
第六步、行进到位施药——待喷雾机从起始处行进至理想施药点位时驻车,启动施药装置按预定量施药。之后循环以上步骤。
[0032]
以上预定夹角α通过以下考量择定:设喷雾距离为a、行距为b、株距为c、株宽为e,当(a+b)/2b<2时(忽略株宽e),α取75
°
,否则α取60
°
;α确定后,根据下式对激光测距传感器与雾化器安装距离d取整即可,d>a/cosα。这样可以保证下一行施药行植株与已施药行的区分(施药定位步骤中第二步的正确性);反之则会导致下一施药行缺少从小到大的采样值突变。
[0033]
第一和第二预设区间分别由按下式计算的第一最大测距有效值lmax1和最小测距有效值lmin以及第二最大测距有效值lmax2和最小测距有效值lmin确定:lmin=(a-e/2)/sinα;lmax1=b/cosα;lmax2=l1+e/2sinα;式中:e——平均株宽。
[0034]
结合图5所示某次具体实验情况更便于理解本发明:喷雾距离为1000 mm,平均行距为1000 mm,平均株距为1200 mm,平均株宽为300 mm;预定夹角α为75
°
,激光测距传感器与雾化器安装距离为d=300 mm,在植株一侧沿v方向行进。
[0035]
激光测距传感器的起始处在o点,初始测距值突然变大;当行进位移x1=96 mm、到达o1点时第一次测得有效测距值l1=3437 mm;当继续行进位移x2=520mm 、到达o2点时第二次测得有效测距值l2=2134mm;由此可以算出起始处至理想施药点位的位移s=709 mm,即处于两个有效测距值在行进方向投影距离s1、s2之间的某一位置。
[0036]
以上具体实验中,d>a/cosα,取值为300 mm便于安装。最大测距有效值:lmax1=b/cosα=1000/ cos75
°
=3863,第一最小测距有效值:lmin=(a-e/2)/sinα=(1000-300/2)/sin75
°
=879,即第一预定区间为879-3863 mm;第二最大测距有效值:lmax2=l1+e/2sinα=3437-300/2sin75
°
=3282,即第一预定区间为879-3282 mm。
[0037]
试验表明,本实施例针对设施栽培作物存在等行距、宽窄行等多种种植模式的现象,无需预先建立复杂的行、株距模型数据库,通过不平行安装的激光测距传感器,对整行植株群体冠层的侧面进行多点同步在线测距采样及分析,同时融合车轮编码器采样数据获取的喷雾机行进位置信息,对植株行进行快速识别与精确定位,并使喷雾机准确定位在各植株行侧最佳喷雾位置进行喷雾作业,避免行间空喷和针对植株行中心线的无效喷雾,适用于等行距、宽窄行等不同种植模式,对行距、株距及植株距度均无限制。
[0038]
总之,本实施例设计了一套基于现有推车式电动离心雾化喷雾机的机载对行施药系统:采取不平行安装激光测距传感器的方式,对整行植株群体冠层的侧面进行多点同步在线测距采样及分析,同时融合车轮编码器采样数据获取的喷雾机行进位置信息,从而对植株行进行快速识别与精确定位,并使喷雾机停车于植株行侧最佳喷雾位置进行喷雾作业,有效提高农药利用率与防治效果。
[0039]
除上述实施例外,本发明还可以有其他实施方式。凡采用等同替换或等效变换形成的技术方案,均落在本发明要求的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1