一种丘陵山地播种喷药一体化智能机器人
1.本发明属于智能农业机械技术领域,具体的说,涉及一种丘陵山地播种喷药一体化智能机器人。
背景技术:
2.三七是中国比较名贵的中药材,需求量非常大,三七种植属于密集型种植模式,且大部分生长在半山区的缓坡地,通常为丘陵山地,对于播种和管理要求较高,当前我国的三七种植的智能化程度较低,大多进行人工播种和喷药,不仅劳动强度大,且容易造成行距不规范,播种深度不一致等问题,同时对人体也有危害,三七种植将面临很大问题。
3.因此,有必要提供一种结构紧凑,实用性强,价格便宜的丘陵山地播种喷药一体化智能机器人,不仅适合三七的种植,还能满足其它的作物的种植和管理,能够很好的适应丘陵山地。
技术实现要素:
4.为了克服背景技术中存在的当前我国的三七种植的智能化程度较低,大多进行人工播种和喷药,不仅劳动强度大,且容易造成行距不规范,播种深度不一致等问题,同时对人体也有危害的问题,本发明提供了一种丘陵山地播种喷药一体化智能机器人,结构紧凑,实用性强,价格便宜,不仅适合三七的种植,还能满足其它的作物的种植和管理,能够很好的适应丘陵山地。
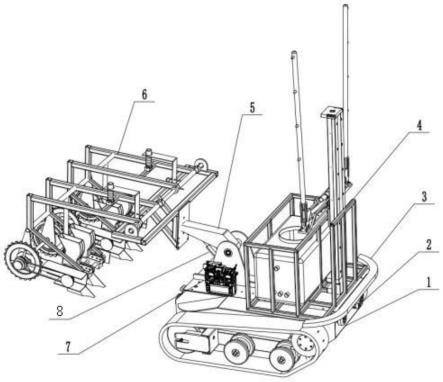
5.为实现上述目的,本发明是通过如下技术方案实现的:本发明提供了一种丘陵山地播种喷药一体化智能机器人,包括履带行走装置1、摄像头2、可调节式喷药装置4、升降机构5、仿形式机械播种机构6、遥控装置7、直线电动推杆8;所述的履带行走装置1上设置有可调节式喷药装置4和升降机构5,升降机构5末端连接有仿形式机械播种机构6,履带行走装置1前侧安装有摄像头2,升降机构5通过直线电动推杆8推动升降。
6.作为优选,所述的履带行走装置1前侧设置有防撞条3。
7.作为优选,所述的仿形式机械播种机构6包括种箱601、传动轮602、开沟器603、单体仿形支架604、支座605、上下限位支架606、限位圈607、连接机构608,连接机构608与升降机构5相连,单体仿形支架604通过支座605和上下限位支架606相连,并通过可左右移动的限位圈607安装在连接机构608上,种箱601安装在单体仿形支架604上,传动轮602通过皮带和种箱601底座前轴相连构成一级传动,前轴上棘轮与种箱上棘轮通过链条连接构成二级传动,通过转轴带动蜗眼轮旋转,开沟器603安装在种箱601底座前端。
8.作为优选,所述的单体仿形支架604和上下限位支架606之间的支座605上套设有弹簧609。
9.作为优选,所述的可调节式喷药装置4包括固定架401、药箱402、喷药杆403、滚轴丝杠滑台404、滑块405,固定架401安装在履带行走装置1上,药箱402置于固定架401内,滚
轴丝杠滑台404竖直安装在固定架401上,滑块405螺纹安装在滚轴丝杠滑台404上,并与喷药杆403相连,喷药杆403上均匀的布置有喷药孔,喷药杆403通过抽药泵连通药箱402内部。
10.作为优选,所述的喷药杆403对称设置有两个,并通过安装架安装在滑块405上,喷药杆403对称的铰接在安装架两侧,喷药杆403和安装架之间通过直线推杆406连接。
11.作为优选,所述的履带行走装置1由蓄电池、驱动器、控制器和直流电机控制驱动,履带行走装置1上安装有灯、电压显示屏、急停按钮以及充电接口,控制器与直流电机、驱动器和遥控装置7的接收器电性连接,摄像头2与无线数传模块相连。
12.作为优选,所述的控制器为stm32单片机,单片机与电机驱动器、摄像头2、壁障模块、遥控装置7的接收器相连,使得机器人具有遥控、巡迹、壁障、监控功能。
13.本发明的有益效果:本发明采用远程遥控式履带车平台,实现农业机械的智能化,在三七种植中对三七进行播种、喷药、运输等作业,只需通过遥控装置和监控器就可坐着把活干完,大大降低了劳动强度,提高了作业效率,可以很好的将丘陵山地和大棚内的作业环境相适应。
附图说明
14.图1是本发明的立体结构示意图;图2是本发明仿形式机械播种机构的结构示意图;图3是本发明可调节式喷药装置的结构示意图;图4是本发明的电路原理图。
15.图中,1-履带行走装置、2-摄像头、3-防撞条、4-可调节式喷药装置、5-升降机构、6-仿形式机械播种机构、7-遥控装置、8-直线电动推杆、401-固定架、402-药箱、403-喷药杆、404-滚轴丝杠滑台、405-滑块、406-直线推杆、601-种箱、602-传动轮、603-开沟器、604-单体仿形支架、605-支座、606-上下限位支架、607-限位圈、608-连接机构、609-弹簧。
具体实施方式
16.为了使本发明的目的、技术方案和有益效果更加清楚,下面将结合附图,对本发明的优选实施例进行详细的说明,以方便技术人员理解。
17.如图1-4所示,所述的丘陵山地播种喷药一体化智能机器人包括履带行走装置1、摄像头2、可调节式喷药装置4、升降机构5、仿形式机械播种机构6、遥控装置7、直线电动推杆8;所述的履带行走装置1便于丘陵山地的行走,其上设置有可调节式喷药装置4和升降机构5,升降机构5末端连接有仿形式机械播种机构6进行牵引式播种,履带行走装置1前侧安装有摄像头2,安装摄像头2对工作的前方路况经行监控,以便远程经行控制,升降机构5通过直线电动推杆8推动升降,带动仿形式机械播种机构6上下升降,实现不工作时抬起,履带行走装置1前侧设置有防撞条3,防止设备撞上物体损坏机器。
18.所述的仿形式机械播种机构6包括种箱601、传动轮602、开沟器603、单体仿形支架604、支座605、上下限位支架606、限位圈607、连接机构608,连接机构608与升降机构5相连,单体仿形支架604通过支座605和上下限位支架606相连,并通过可左右移动的限位圈607安装在连接机构608上,种箱601安装在单体仿形支架604上,传动轮602通过皮带和种箱601底座前轴相连构成一级传动,前轴上棘轮与种箱上棘轮通过链条连接构成二级传动,通过转
轴带动蜗眼轮旋转,开沟器603安装在种箱601底座前端,单体仿形支架604和上下限位支架606之间的支座605上套设有弹簧609。
19.所述的单体仿形支架604、链条构成的传动装置、弹簧609、支座605、上下限位支架606构成单体的仿形单元,解决播种地面不平整带来的打滑和播种不均匀的问题,开沟器603与种箱601底座前端相连进行播种前的开沟处理,限位圈607可左右移动便于调节播种株距,仿形单元通过弹簧609减震。
20.所述的可调节式喷药装置4包括固定架401、药箱402、喷药杆403、滚轴丝杠滑台404、滑块405,固定架401安装在履带行走装置1上,药箱402置于固定架401内,滚轴丝杠滑台404竖直安装在固定架401上,滑块405螺纹安装在滚轴丝杠滑台404上,并与喷药杆403相连,喷药杆403上均匀的布置有喷药孔,喷药杆403通过抽药泵连通药箱402内部。
21.所述的喷药杆403对称设置有两个,并通过安装架安装在滑块405上,喷药杆403对称的铰接在安装架两侧,喷药杆403和安装架之间通过直线推杆406连接,通过直线推杆406调节喷药杆403的喷药角度。
22.所述的喷药装置4采用模块化设计,不使用时可从履带行走装置上拆除,每个喷药杆403上设置有四个喷嘴,采用控制电机的方式来控制喷药量,通过步进电机带动滚轴丝杠滑台404的滚轴丝杠旋转,进而带动滑块405和喷药杆403上下移动调节喷药的高度,以满足三七苗不同时期的的喷药,喷水管理,直线推杆406与喷药杆403相连,通过控制直线推杆406伸缩使其喷药时展开两个喷药杆403,使其为水平状态,增大了喷药面积。
23.所述的履带行走装置1由蓄电池、驱动器、控制器和直流电机控制驱动,履带行走装置1上安装有灯、电压显示屏、急停按钮以及充电接口,控制器与直流电机、驱动器和遥控装置7的接收器电性连接,摄像头2与无线数传模块相连,控制器为stm32单片机,单片机与电机驱动器、摄像头2、壁障模块、遥控装置7的接收器相连,使得机器人具有遥控、巡迹、壁障、监控功能,可在远处通过摄像头2传回手机或显示屏上的实时图像观察车的位置,通过手柄远程控制履带式三七播种机,全自动化地播种,降低劳动强度。
24.本发明的工作过程:在需要播种时,将仿形式机械播种机构6固定在履带行走装置1的升降机构5上,通过摄像头2传回手机的图像,遥控装置7远程控制履带行走装置1平台行走,牵引着仿形式机械播种机构6的传动轮602转动,传动轮602的转轴通过皮带和种箱601底座前轴相连构成一级传动,前轴上棘轮与种箱601上棘轮通过链条连接构成二级传动,通过转轴带动蜗眼轮旋转进行排种,与种箱601底座前端相连的开沟器603进行播种前的开沟处理,仿形单元通过弹簧609减震,可进行上下小范围的转动进行仿形,解决播种地面不平整带来的打滑和播种不均匀问题,播种季节结束后可拆卸掉仿形式机械播种机构6,安装可调节式喷药装置4,实现对三七的喷水、喷肥液和农药管理,通过控制器控制喷洒量,最后三七收获时,履带行走装置1平台还可执行丘陵山地的运输功能。
25.本发明采用远程遥控式履带车平台,实现农业机械的智能化,在三七种植中对三七进行播种、喷药、运输等作业,只需通过遥控装置7和监控器就可坐着把活干完,大大降低了劳动强度,提高了作业效率,可以很好的将丘陵山地和大棚内的作业环境相适应。
26.最后说明的是,以上优选实施例仅用于说明本发明的技术方案而非限制,尽管通过上述优选实施例已经对本发明进行了详细的描述,但本领域技术人员应当理解,可以在
形式上和细节上对其作出各种各样的改变,而不偏离本发明权利要求书所限定的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1