一种农业植保机器人及其农药装配机构的制作方法
1.本发明涉及农业植保机器人技术领域,尤其涉及一种农业植保机器人及其农药装配机构。
背景技术:
2.农业植保机器人是对农作物或花卉喷洒药水对植物进行保护的一种设备,随着社会的不断进步与科技的发展,农业植保机器人已经普遍应用于市场上,中国专利网公开了专利号为:cn201410286793.8的一种农田植保机器人,烟雾机前端通过推杆转轴连接电动推杆,电动推杆由电动推杆固定转轴连接烟雾机后端,烟雾机前端通过推杆转轴连接电动推杆,电动推杆由电动推杆固定板固定,升降通过电动推杆的伸缩和转轴实现,代替了人工作业,提高了喷洒的效率;
3.上述专利中电动推杆向上推动能够带动喷烟管向上翘起,从而发生了角度的改变可以喷洒较高的植物,但是这种调节的方式仍然存在一定的弊端,喷出的药雾大多数都是向上喷出,不能使药雾完全喷在植物上,且如果遇到有风的天气,药雾会随风骗走,降低喷洒的效率;上述专利中在装药的时候不便于进行配置,且需要将手部触碰盖体才能打开盖体,在喷雾的时候盖体上难免会落有药雾;
4.鉴于以上缺陷,因此我们提出一种农业植保机器人及其农药装配机构。
技术实现要素:
5.本发明的目的是针对背景技术中存在的问题,提出一种农业植保机器人及其农药装配机构。
6.本发明的技术方案:一种农业植保机器人,包括行走底座以及连接于行走底座上端的机器人本体与设置于机器人本体内部的药箱,所述机器人本体的上端设置有与药箱连通的供料泵,所述机器人本体的上端还连接有进料管,还包括连接于机器人本体一侧的矩形竖杆以及贯穿连接于矩形竖杆内部的输液管,所述矩形竖杆的一侧通过支撑块转动连接有螺纹杆,所述螺纹杆的外侧套设有升降块,所述升降块的上端固定连接有u形支撑板与横向设置于u形支撑板内侧的供水管;还包括设置于矩形竖杆一侧且与供水管配合使用的转向组件,所述转向组件包括固定套设于供水管外侧的两个转向齿轮,所述供水管的一侧连接有两个位于两个转向齿轮外侧的喷水管,所述u形支撑板上设置有与喷水管配合使用的活动支撑机构。
7.优选的,所述矩形竖杆的一侧固定连接有电机箱,所述电机箱内设有电机,且电机的输出轴与螺纹杆的下端固定连接。
8.优选的,所述供料泵的输出端与输液管之间通过水管连接,所述输液管的上端一侧连接有贯穿于矩形竖杆且与供水管连通的软管。
9.优选的,所述供水管的两端均套设有连接套,两个所述连接套互相远离的一端均固定连接有连接轴,两个连接轴分别与u形支撑板的两侧内壁转动连接。
10.优选的,所述活动支撑机构包括贯穿连接于u形支撑板下端的支撑滑杆,所述支撑滑杆的底端固定连接有限位块,所述支撑滑杆的上端固定连接有对喷水管支撑的弧形支撑块,且所述支撑滑杆的外侧套设有弹簧。
11.优选的,所述转向组件还包括固定连接于矩形竖杆上端两侧的连接块以及竖向连接于连接块外端的传动齿条,两个所述传动齿条分别与两个转向齿轮位于同一垂直面且互相啮合传动。
12.优选的,所述u形支撑板的一侧连接有位于两个喷水管上端的限位杆,对两个喷水管限位。
13.一种农业植保机器人的农药装配机构,所述机器人本体的上端一侧设置有与进料管配合使用的装配药水组件,所述装配药水组件包括活动插接于进料管内部的密封盖与连接于密封盖上端的l形连接杆以及贯穿螺接于l形连接杆上的调节螺杆,所述进料管的侧面开设有进液口,所述进液口的一侧固定连接有配药管。
14.优选的,所述机器人本体的侧面固定连接有回形罩,所述调节螺杆的底端插接于回形罩内部,所述配药管上设置有刻度线。
15.与现有技术相比,本发明具有如下有益的技术效果:
16.1、通过在矩形竖杆的一侧设置于供水管配合使用的转向组件,当需要对植物的顶部进行喷洒的时候,使电机的输出轴反向转动带动u形支撑板向上移动,u形支撑板向上移动当两个转向齿轮移动至两个传动齿条的内侧时,将会与传动齿条啮合传动,从而会带动供水管的角度向下发生改变,使两个喷水管的喷洒头向下倾斜,从而可以对植物的顶部进行喷洒,在对植物顶部喷洒的时候喷头是向下的,可以防止喷雾喷向空中,浪费农药喷雾,也防止了喷雾受到外部风力的作用对旁边的植物造成影响,该机器人结构设计合理,调节方便,在对植物顶部喷洒调节的同时还能对两个喷水管的角度进行改变,可以顺利对植物的顶部完成喷雾,有效地避免了喷雾浪费,且还能调节侧面喷洒的高低;
17.2、通过在进料管的一侧设置装配药水组件,当需要装配农药的时候将手部伸入回形罩内转动调节螺杆,使得l形连接杆向上移动,l形连接杆向上移动带动密封盖向上移动,从而使密封盖离开进液口的内侧,配药管内配比好的农药将会通过进液口流入进料管内,在操作的时候手部不会接触密封盖,避免手部沾染农药,提高了操作的安全度。
附图说明
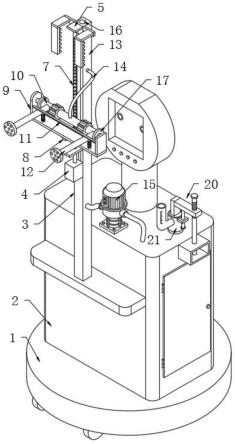
18.图1是一种农业植保机器人及其农药装配机构的立体结构示意图;
19.图2是图1中供水管与转向组件的结构示意图;
20.图3是本发明中装配药水组件的结构示意图;
21.图4是图2中a处放大结构示意图;
22.图5是图2中b处放大结构示意图。
23.附图标记:1、行走底座;2、机器人本体;3、矩形竖杆;4、电机箱;5、支撑块;7、螺纹杆;8、升降块;9、u形支撑板;10、供水管;12、喷水管;13、转向组件;1301、连接块;1302、传动齿条;1303、转向齿轮;14、软管;15、供料泵;16、输液管;17、连接套;18、限位杆;19、活动支撑机构;1901、支撑滑杆;1902、弧形支撑块;1903、弹簧;20、装配药水组件;2001、密封盖;2002、l形连接杆;2003、回形罩;2004、调节螺杆;2005、限位杆;2006、进液口;2007、配药管;
21、进料管。
具体实施方式
24.下文结合附图和具体实施例对本发明的技术方案做进一步说明。
25.实施例一
26.如图1与图2所示,本发明提出的一种农业植保机器人,包括行走底座1以及连接于行走底座1上端的机器人本体2与设置于机器人本体2内部的药箱,机器人本体2的上端设置有与药箱连通的供料泵15,机器人本体2的上端还连接有进料管21,其特征在于,还包括:连接于机器人本体2一侧的矩形竖杆3以及贯穿连接于矩形竖杆3内部的输液管16,矩形竖杆3的一侧通过支撑块5转动连接有螺纹杆7,矩形竖杆3的一侧固定连接有电机箱4,电机箱4内设有电机,且电机的输出轴与螺纹杆7的下端固定连接;螺纹杆7的外侧套设有升降块8,升降块8的上端固定连接有u形支撑板9与横向设置于u形支撑板9内侧的供水管10;供水管10的两端均套设有连接套17,两个连接套17互相远离的一端均固定连接有连接轴,两个连接轴分别与u形支撑板9的两侧内壁转动连接,使供水管10的角度可以顺利的改变;还包括设置于矩形竖杆3一侧且与供水管10配合使用的转向组件13,结合图4,转向组件13包括固定套设于供水管10外侧的两个转向齿轮1303,转向组件13还包括固定连接于矩形竖杆3上端两侧的连接块1301以及竖向连接于连接块1301外端的传动齿条1302,两个传动齿条1302分别与两个转向齿轮1303位于同一垂直面且互相啮合传动;供水管10的一侧连接有两个位于两个转向齿轮1303外侧的喷水管12,u形支撑板9的一侧连接有位于两个喷水管12上端的限位杆18,对两个喷水管12限位,u形支撑板9上设置有与喷水管12配合使用的活动支撑机构19,参照图5,活动支撑机构19包括贯穿连接于u形支撑板9下端的支撑滑杆1901,支撑滑杆1901的底端固定连接有限位块,支撑滑杆1901的上端固定连接有对喷水管12支撑的弧形支撑块1902,且支撑滑杆1901的外侧套设有弹簧1903,在支撑滑杆1901的弹力作用下弧形支撑块1902能够对供水管10起到支撑的作用,在限位杆18的配合下,两个喷水管12在喷洒的时候不会随意晃动,从而可以提高喷水管12的稳定性;供料泵15的输出端与输液管16之间通过水管连接,输液管16的上端一侧连接有贯穿于矩形竖杆3且与供水管10连通的软管14。
27.实施例二
28.如图1与图3所示,本发明提出的一种农业植保机器人的农药装配机构,本实施例包括:包括行走底座1以及连接于行走底座1上端的机器人本体2与设置于机器人本体2内部的药箱,机器人本体2的上端设置有与药箱连通的供料泵15,机器人本体2的上端还连接有进料管21,其特征在于,还包括:连接于机器人本体2一侧的矩形竖杆3以及贯穿连接于矩形竖杆3内部的输液管16,矩形竖杆3的一侧通过支撑块5转动连接有螺纹杆7,螺纹杆7的外侧套设有升降块8,升降块8的上端固定连接有u形支撑板9与横向设置于u形支撑板9内侧的供水管10;还包括设置于矩形竖杆3一侧且与供水管10配合使用的转向组件13,转向组件13包括固定套设于供水管10外侧的两个转向齿轮1303,供水管10的一侧连接有两个位于两个转向齿轮1303外侧的喷水管12,u形支撑板9上设置有与喷水管12配合使用的活动支撑机构19,机器人本体2的上端一侧设置有与进料管21配合使用的装配药水组件20,装配药水组件20包括活动插接于进料管21内部的密封盖2001与连接于密封盖2001上端的l形连接杆2002以及贯穿螺接于l形连接杆2002上的调节螺杆2004,l形连接杆2002的下端固定连接有限位
杆2205,进料管21的侧面连接有固定块,限位杆2205贯穿固定块且与其滑动连接,进料管21的侧面开设有进液口2006,进液口2006的一侧固定连接有配药管2007,配药管2007竖直向上,便于向内部配置药水,机器人本体2的侧面固定连接有回形罩2003,调节螺杆2004的底端插接于回形罩2003内部,在操作的时候人们将手部伸入回形罩2003内再转动调节螺杆2004,农药喷雾即使会喷洒在机器人外表面,也不会喷至回形罩2003内侧,这样操作可以提高操作的安全度,配药管2007上设置有刻度线,可以掌控农药的配比量。
29.工作原理:在使用该机器人的时候,将其移动至植物的一侧,使两个喷水管12对准植物的侧面,可以根据植物的高度调节两个喷水管12的高度,通过启动电机箱4内的电机即可以调节,电机的输出轴正向转动可以带动升降块8向下移动,升降块8向下移动带动u形支撑板9向下移动,最后可以带动两个喷水管12向下移动,反之电机的输出轴正向转动可以带动两个喷水管12向上移动,调节好两个喷水管12的高度后使机器人移动喷洒农药,当植物的侧面喷洒完成后,再次启动电机箱4内的电机,使电机的输出轴反向转动带动u形支撑板9向上移动,u形支撑板9向上移动当两个转向齿轮1303移动至两个传动齿条1302的内侧时,将会与传动齿条1302啮合传动,从而会带动供水管10的角度向下发生改变,使两个喷水管12的喷洒头向下倾斜,从而可以对植物的顶部进行喷洒,在对植物顶部喷洒的时候喷头是向下的,可以防止喷雾喷向空中,浪费农药喷雾,也防止了喷雾受到外部风力的作用对旁边的植物造成影响,该机器人结构设计合理,调节方便,在对植物顶部喷洒调节的同时还能对两个喷水管12的角度进行改变,可以顺利对植物的顶部完成喷雾,有效地避免了喷雾浪费;通过在进料管21的一侧设置装配药水组件20,当需要装配农药的时候,首先将适量的农药倒入配药管2007内,配药管2007的外表面设置有刻度,可以控制农药的量,然后将手部伸入回形罩2003内转动调节螺杆2004,使得l形连接杆2002向上移动,l形连接杆2002向上移动带动密封盖2001向上移动,从而使密封盖2001离开进液口2006的内侧,配药管2007内配比好的农药将会通过进液口2006流入进料管21内,然后加入适量的水,最后再反向转动调节螺杆2004,使得密封盖2001插入进料管21内,在操作的时候手部不会接触密封盖2001,避免手部沾染农药,提高了操作的安全度。
30.上述具体实施例仅仅是本发明的几种优选的实施例,基于本发明的技术方案和上述实施例的相关启示,本领域技术人员可以对上述具体实施例做出多种替代性的改进和组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1