漂浮板定植采收装置的制作方法
1.本技术涉及无土栽培领域,尤其是涉及一种漂浮板定植采收装置。
背景技术:
2.浮板水培技术是指植物定植在浮板上,浮板在营养液池中自然漂浮的一种水培模式。它是dft的一种栽培形式。池中营养液深度一般在10~100cm范围内,根据池中营养液的深浅,可分为深水漂浮栽培系统和浅池漂浮栽培系统。
3.传统技术中,漂浮板的种植和采收是由种植工人人工从叶菜水池中取放,这种方法劳动力成本大,费时费力;或者是完全的自动化定植采收设备,设备成本高,温室面积不大的时候,不合适。
技术实现要素:
4.本技术的目的是在于提供一种漂浮板定植采收装置,从而解决了现有在漂浮板的种植和采收过程中,若通过人工从叶菜水池中取放,这种方法劳动力成本大,费时费力,若是完全的自动化定植采收设备,设备成本高,温室面积不大的时候,不合适的问题。
5.根据本技术提供了一种漂浮板定植采收装置,所述漂浮板定植采收装置包括悬挂机和采收车,所述悬挂机能够将漂浮板输送至水池附近,所述采收车包括连接机构、承载机构、推动机构、升降机构、旋转机构、把手以及拉手,所述承载机构连接于所述连接机构的下方,用于承载所述漂浮板,所述推动机构连接于所述承载机构的前端的下方,所述连接机构与所述把手均连接所述升降机构,所述把手能够使得所述升降机构升降,以带动所述连接机构升降,所述拉手通过所述旋转机构连接所述承载机构,所述拉手能够使得所述旋转机构旋转,以带动所述承载机构旋转。
6.在上述任意技术方案中,进一步地,所述采收车还包括主框体,所述升降机构包括升降框体,所述升降框体在第一方向上彼此相对的两个侧部的两个外侧壁分别与所述主框体在第一方向上彼此相对的两个侧部的两个内侧壁滑动连接,所述升降框体的前侧连接所述连接机构,所述升降框体的后侧连接所述把手,所述把手能够使得所述升降框体升降,以带动所述连接机构升降,所述第一方向与所述升降方向垂直。
7.在上述任意技术方案中,进一步地,所述升降机构还包括滑轮、输送带以及对重块,所述滑轮连接于所述主框体的顶部,所述输送带绕设于所述滑轮,且一端连接所述升降框体的顶部,另一端连接所述对重块。
8.在上述任意技术方案中,进一步地,所述采收车还包括中介机构,所述中介机构包括两个支撑件,两个支撑件均沿第二方向上延伸,两个支撑件的两个第一端部分别连接所述升降框体在第一方向上彼此相对的两个侧部的两个内侧壁,且任一所述第一端部的顶侧与升降框架的顶部抵接,任一所述支撑件设置有长孔,所述采收车还包括两个横杆,所述两个横杆分别连接所述主框体在第一方向上彼此相对的两个侧部,所述两个横杆均沿第二方向延伸,所述把手包括抓杆、连接杆以及两个支撑杆,所述抓杆的两端分别连接所述两个支
撑杆的两个第一端,所述连接杆的两端分别连接所述两个支撑杆的两个第二端,所述连接杆穿过两个所述长孔,所述两个支撑杆分别与所述两个横杆转动连接,所述升降方向、第一方向以及第二方向两两垂直。
9.在上述任意技术方案中,进一步地,任一所述支撑杆的中部与对应的所述横杆的远离所述连接机构的端部转动连接,所述采收车还包括两个竖杆,两个竖杆分别连接所述两个横杆远离所述连接机构的两个端部。
10.在上述任意技术方案中,进一步地,所述采收车还包括底框架和车轮,所述两个竖杆的底端和所述主框体在第一方向上彼此相对的两个侧部的两个底端均连接所述底框架的顶部,所述车轮连接于所述底框架的底部。
11.在上述任意技术方案中,进一步地,所述承载机构包括多个沿升降方向延伸的一次推杆以及多个沿第二方向延伸的二次推杆,所述多个一次推杆在第一方向上间隔设置,任一所述一次推杆的第一端贯穿所述连接机构,任一所述一次推杆的第二端连接对应的所述二次推杆的第一端,所述采收车还包括辅助杆、第一连杆以及多个第二连杆,所述旋转机构包括多个转盘,所述多个转盘与所述多个一次推杆一一对应,所述多个转盘分别与所述多个一次推杆的多个第一端连接,所述辅助杆连接所述连接机构的后侧,且沿所述第二方向延伸,所述拉手连接于所述辅助杆的远离所述连接机构的一端,所述拉手通过所述第一连杆与其中一个转盘连接,所述第一连杆沿所述第二方向延伸,所述多个第二连杆沿所述第一方向延伸,所述多个转盘之间通过所述第二连杆连接,所述拉手能够拉动所述第一连杆,以使得其中一个转盘旋转,且带动其余转盘朝一个方向旋转。
12.在上述任意技术方案中,进一步地,所述转盘和所述一次推杆均为四个,定义任一所述转盘包括顺次排布的第一点、第二点、第三点以及第四点,定义与第一连杆连接的转盘为第一转盘,所述第一转盘的一侧设置有第二转盘,另一侧设置有第三转盘和第四转盘,所述第一连杆连接所述第一转盘的第一点,所述第二转盘的第三点与所述第一转盘的第三点连接,所述第一转盘的第二点与所述第三转盘的第二点连接,所述第三转盘的第四点与所述第四转盘的第四点连接。
13.在上述任意技术方案中,进一步地,所述推动机构包括多个沿升降方向延伸的三次推杆,任一所述三次推杆连接对应的所述二次推杆的第二端。
14.在上述任意技术方案中,进一步地,所述悬挂机包括轨道、输送架以及承载架,所述输送架与所述轨道滑动连接,所述承载架连接所述输送架,用于承载所述漂浮板。
15.根据本技术的漂浮板定植采收装置,漂浮板定植采收装置包括悬挂机和采收车,悬挂机能够将漂浮板输送至水池附近,采收车包括连接机构、承载机构、推动机构、升降机构、旋转机构、把手以及拉手,其中,承载机构连接于连接机构的下方,用于承载漂浮板,推动机构连接于承载机构的前端的下方,连接机构与把手均连接升降机构,把手能够受外力使得升降机构升降,以带动连接机构升降,进而带动承载机构升降,拉手通过旋转机构连接承载机构,拉手能够受外力使得旋转机构旋转,以带动承载机构旋转。
16.本技术的漂浮板定植采收装置介于完全的自动化定植和人工定植之间,既降低了设备成本,而且一个种植工人可以完成定植过程,节省劳动力。
17.具体过程;悬挂机首先将漂浮板输送至水池附近,现场人员通过下压或提升把手,调节承载机构的升降,进而通过承载机构接收承载漂浮板,然后将采收车推到池边,提升把
手,将漂浮板放下,此时,承载机构的底部贴合地面,推动机构进入池水中,然后将采收车继续向池内推入,此时,推动机构推动原有池中的漂浮板,将漂浮板推走,并留出空位,紧接着将漂浮板放入留出的空位,最后,拉动拉手,使得承载机构旋转(例如旋转90度),目的使得承载机构脱离漂浮板,并从较小的缝隙中(漂浮板与池边的缝隙)离开水池。
18.为使本技术的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
附图说明
19.为了更清楚地说明本技术实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本技术的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
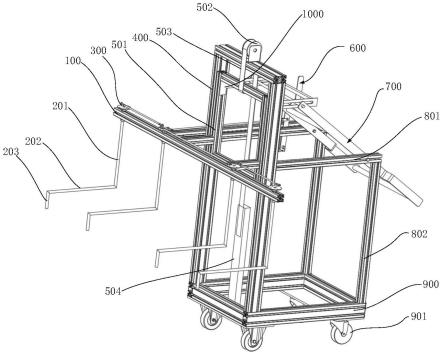
20.图1示出根据本技术的实施例的采收车的整体结构示意图;
21.图2示出图1的另一视角的示意图;
22.图3示出图1的再一视角的示意图;
23.图4示出根据本技术的实施例的悬挂机的结构示意图。
24.图标:100-连接机构;201-一次推杆;202-二次推杆;203-三次推杆;300-转盘;301-第一转盘;302-第二转盘;303-第三转盘;304-第四转盘;305-第一点;306-第二点;307-第三点;308-第四点;309-第一连杆;310-第二连杆;400-主框体;501-升降框体;502-滑轮;503-输送带;504-对重块;600-拉手;700-把手;701-抓杆;702-连接杆;703-支撑杆;801-横杆;802-竖杆;900-底框架;901-车轮;1000-支撑件;1100-辅助杆;1-轨道;2-输送架;3-承载架;y-第一方向;z-第二方向。
具体实施方式
25.提供以下具体实施方式以帮助读者获得对这里所描述的方法、设备和/或系统的全面理解。然而,在理解本技术的公开内容之后,这里所描述的方法、设备和/或系统的各种改变、修改及等同物将是显而易见的。例如,这里所描述的操作的顺序仅仅是示例,其并不限于这里所阐述的顺序,而是除了必须以特定顺序发生的操作之外,可做出在理解本技术的公开内容之后将是显而易见的改变。此外,为了提高清楚性和简洁性,可省略本领域中已知的特征的描述。
26.这里所描述的特征可以以不同的形式实施,并且不应被解释为局限于这里所描述的示例。更确切地说,已经提供了这里所描述的示例仅用于示出在理解本技术的公开内容之后将是显而易见的实现这里描述的方法、设备和/或系统的诸多可行方式中的一些方式。
27.在整个说明书中,当元件(诸如,层、区域或基板)被描述为“在”另一元件“上”、“连接到”另一元件、“结合到”另一元件、“在”另一元件“之上”或“覆盖”另一元件时,其可直接“在”另一元件“上”、“连接到”另一元件、“结合到”另一元件、“在”另一元件“之上”或“覆盖”另一元件,或者可存在介于它们之间的一个或更多个其他元件。相比之下,当元件被描述为“直接在”另一元件“上”、“直接连接到”另一元件、“直接结合到”另一元件、“直接在”另一元件“之上”或“直接覆盖”另一元件时,可不存在介于它们之间的其他元件。
28.如在此所使用的,术语“和/或”包括所列出的相关项中的任何一项和任何两项或更多项的任何组合。
29.尽管可在这里使用诸如“第一”、“第二”和“第三”的术语来描述各个构件、组件、区域、层或部分,但是这些构件、组件、区域、层或部分不受这些术语所限制。更确切地说,这些术语仅用于将一个构件、组件、区域、层或部分与另一构件、组件、区域、层或部分相区分。因此,在不脱离示例的教导的情况下,这里所描述的示例中所称的第一构件、组件、区域、层或部分也可被称为第二构件、组件、区域、层或部分。
30.为了易于描述,在这里可使用诸如“在
……
之上”、“上部”、“在
……
之下”和“下部”的空间关系术语,以描述如附图所示的一个元件与另一元件的关系。这样的空间关系术语意图除了包含在附图中所描绘的方位之外,还包含装置在使用或操作中的不同方位。例如,如果附图中的装置被翻转,则被描述为相对于另一元件位于“之上”或“上部”的元件随后将相对于另一元件位于“之下”或“下部”。因此,术语“在
……
之上”根据装置的空间方位而包括“在
……
之上”和“在
……
之下”两种方位。所述装置还可以以其他方式定位(例如,旋转90度或处于其他方位),并将对在这里使用的空间关系术语做出相应的解释。
31.在此使用的术语仅用于描述各种示例,并非用于限制本公开。除非上下文另外清楚地指明,否则单数的形式也意图包括复数的形式。术语“包括”、“包含”和“具有”列举存在的所陈述的特征、数量、操作、构件、元件和/或它们的组合,但不排除存在或添加一个或更多个其他特征、数量、操作、构件、元件和/或它们的组合。
32.由于制造技术和/或公差,可出现附图中所示的形状的变化。因此,这里所描述的示例不限于附图中所示的特定形状,而是包括在制造期间出现的形状上的改变。
33.这里所描述的示例的特征可按照在理解本技术的公开内容之后将是显而易见的各种方式进行组合。此外,尽管这里所描述的示例具有各种各样的构造,但是如在理解本技术的公开内容之后将显而易见的,其他构造是可能的。
34.本技术提供了一种漂浮板定植采收装置,从而解决了现有在漂浮板的种植和采收过程中,若通过人工从叶菜水池中取放,这种方法劳动力成本大,费时费力,若是完全的自动化定植采收设备,设备成本高,温室面积不大的时候,不合适的问题。
35.浮板水培技术是指植物定植在浮板上,浮板在营养液池中自然漂浮的一种水培模式。它是dft的一种栽培形式。池中营养液深度一般在10~100cm范围内,根据池中营养液的深浅,可分为深水漂浮栽培系统和浅池漂浮栽培系统。
36.在本技术提出之前,传统技术中,漂浮板的种植和采收是由种植工人人工从叶菜水池中取放,这种方法劳动力成本大,费时费力;或者是完全的自动化定植采收设备,设备成本高,温室面积不大的时候,不合适。
37.鉴于此,根据本技术提供了一种漂浮板定植采收装置,漂浮板定植采收装置包括悬挂机和采收车,悬挂机能够将漂浮板输送至水池附近,采收车包括连接机构100、承载机构、推动机构、升降机构、旋转机构、把手700以及拉手600,其中,承载机构连接于连接机构100的下方,用于承载漂浮板,推动机构连接于承载机构的前端的下方(这里,前端,即前方方向,可以指采收车向前移动的方向),连接机构100与把手700均连接升降机构,把手700能够受外力使得升降机构升降,以带动连接机构100升降,进而带动承载机构升降,拉手600通过旋转机构连接承载机构,拉手600能够受外力使得旋转机构旋转,以带动承载机构旋转。
38.本技术的漂浮板定植采收装置介于完全的自动化定植和人工定植之间,既降低了设备成本,而且一个种植工人可以完成定植过程,节省劳动力。
39.具体过程;悬挂机首先将漂浮板输送至水池附近,现场人员通过下压或提升把手700,调节承载机构的升降,进而通过承载机构接收承载漂浮板,然后将采收车推到池边,提升把手700,将漂浮板放下,此时,承载机构的底部贴合地面,推动机构进入池水中,然后将采收车继续向池内推入,此时,推动机构推动原有池中的漂浮板,将漂浮板推走,并留出空位,紧接着将漂浮板放入留出的空位,最后,拉动拉手600,使得承载机构旋转(例如旋转90度),目的使得承载机构脱离漂浮板,并从较小的缝隙中(漂浮板与池边的缝隙)离开水池。在下文将详细描述连接机构100、承载机构、推动机构、升降机构、旋转机构、把手700以及拉手600的具体结构以及连接关系。
40.在本技术实施例中,如图1至图3所示,采收车还包括主框体400,升降机构包括升降框体501,升降框体501在第一方向y上彼此相对的两个侧部的两个外侧壁分别与主框体400在第一方向y上彼此相对的两个侧部的两个内侧壁滑动连接,升降框体501的前侧连接连接机构100(连接机构100可以是横梁或横杆801,沿第一方向y延伸),作为示例,升降框体501的前侧(第一方向y上彼此相对的两个侧部)分别通过两个沿第二方向z延伸的杆与连接机构100连接,升降框体501的后侧连接把手700,把手700能够使得升降框体501升降,以带动连接机构100升降,这里,第一方向y与升降方向垂直。
41.在本技术实施例中,如图1至图3所示,升降机构还可以包括滑轮502、输送带503以及对重块504,滑轮502连接于主框体400的顶部(主框体可以为矩形),即主框体400在第二方向z上的顶部横梁的上侧,输送带503绕设于滑轮502,且一端连接升降框体501的顶部,例如绕设至升降框体501的顶部横梁的下侧,另一端连接对重块504,通过对重块504,滑轮502机构可以减少劳动强度。
42.进一步地,如图1至图3所示,采收车还可以包括中介机构,中介机构包括两个支撑件1000,两个支撑件1000均沿第二方向z上延伸,两个支撑件1000的两个第一端部分别连接升降框体501在第一方向y上彼此相对的两个侧部的两个内侧壁,且任一第一端部的顶侧与升降框架的顶部抵接(升降框架的顶部横梁的下侧),此外,任一支撑件1000设置有长孔。
43.此外,采收车还包括两个横杆801,两个横杆801分别连接主框体400在第一方向y上彼此相对的两个侧部,两个横杆801均沿第二方向z延伸。
44.作为示例,把手700可以包括抓杆701、连接杆702以及两个支撑杆703,抓杆701的两端分别连接两个支撑杆703的两个第一端,连接杆702的两端分别连接两个支撑杆703的两个第二端,连接杆702穿过两个长孔,两个支撑杆703分别与两个横杆801转动连接,这里,升降方向、第一方向y以及第二方向z两两垂直。
45.优选地,任一支撑杆703的中部与对应的横杆801的远离连接机构100的端部转动连接,这里,中部可以指支撑杆703中部的多个位置,即除了两端的其余位置。
46.现场人员操作时,可以向上提升抓杆701,连接杆702下压支撑件1000,支撑件1000的端部带动升降框体501下降,升降框体501带动连接机构100下降,进而使得承载机构下降。
47.此外,在本技术实施例中,如图1至图3所示,采收车还可以包括两个竖杆802,两个竖杆802分别连接两个横杆801远离连接机构100的两个端部。
48.此外,采收车还包括底框架900和车轮901,两个竖杆802的底端和主框体在第一方向y上彼此相对的两个侧部的两个底端均连接底框架900的顶部,底框架900的底部还可以安装两个安装板,其中一个安装板底部安装一对万向脚轮,另一个安装板安装一对定向脚轮。
49.在本技术的实施例中,如图1至图3所示,承载机构可以包括多个沿升降方向延伸的一次推杆201以及多个沿第二方向z延伸的二次推杆202,多个一次推杆201在第一方向y上间隔设置,任意一次推杆201的第一端贯穿连接机构100,任意一次推杆201的第二端连接对应的二次推杆202的第一端,采收车还包括辅助杆1100、第一连杆309以及多个第二连杆310,旋转机构可以包括多个转盘300,多个转盘300与多个一次推杆201一一对应,这里,多个转盘300分别与多个一次推杆201的多个第一端连接,其中,辅助杆1100连接连接机构100的后侧,且沿第二方向z延伸,拉手600连接于辅助杆1100的远离连接机构100的一端,例如,辅助杆1100的底部还可以连接有杆件,杆件可以沿升降方向延伸,拉手600与杆件转动连接。
50.进一步地,拉手600通过第一连杆309与其中一个转盘300连接,第一连杆309沿第二方向z延伸,多个第二连杆310沿第一方向y延伸,多个转盘300之间通过第二连杆310连接,拉手600能够拉动第一连杆309,以使得其中一个转盘300旋转,且带动其余转盘300朝一个方向旋转。
51.作为示例,如图3所示,转盘300和一次推杆201均为四个,定义任一转盘包括顺次排布的第一点305、第二点306、第三点307以及第四点308,定义与第一连杆309连接的转盘为第一转盘301,第一转盘301的一侧设置有第二转盘302,另一侧设置有第三转盘303和第四转盘304,第一连杆309连接第一转盘301的第一点305,第二转盘302的第三点307与第一转盘301的第三点307连接,第一转盘301的第二点306与第三转盘303的第二点306连接,第三转盘303的第四点308与第四转盘304的第四点308连接。
52.现场人员操作时,向后搬动拉手600,第一连杆309拉动第一转盘301旋转,第一转盘301通过第二连杆310带动其余转盘同时向一个方向旋转,进而使得四个转盘300带动四个一次推杆201旋转,旋转90度时,即四个一次推杆201均保持在第一条直线上(第一方向y),进而方便使得承载机构从水池中离开。
53.这里,优选地,推动机构可以包括多个沿升降方向延伸的三次推杆203,任意三次推杆203连接对应的二次推杆202的第二端。
54.在本技术的实施例中,如图4所示,悬挂机可以包括轨道1、输送架2以及承载架3,输送架2与所述轨道1滑动连接,输送架2可以形成为“]”形,承载架3可以为两个,两个承载架3分别通过销钉连接输送架2的两端,且高度可调,承载架3能够沿着轨道1将漂浮板托运到水池旁边。
55.根据本技术的漂浮板定植采收装置,漂浮板定植采收装置包括悬挂机和采收车,悬挂机能够将漂浮板输送至水池附近,采收车包括连接机构、承载机构、推动机构、升降机构、旋转机构、把手以及拉手,其中,承载机构连接于连接机构的下方,用于承载漂浮板,推动机构连接于承载机构的前端的下方,连接机构与把手均连接升降机构,把手能够受外力使得升降机构升降,以带动连接机构升降,进而带动承载机构升降,拉手通过旋转机构连接承载机构,拉手能够受外力使得旋转机构旋转,以带动承载机构旋转。
56.本技术的漂浮板定植采收装置介于完全的自动化定植和人工定植之间,既降低了设备成本,而且一个种植工人可以完成定植过程,节省劳动力。
57.具体过程;悬挂机首先将漂浮板输送至水池附近,现场人员通过下压或提升把手,调节承载机构的升降,进而通过承载机构接收承载漂浮板,然后将采收车推到池边,提升把手,将漂浮板放下,此时,承载机构的底部贴合地面,推动机构进入池水中,然后将采收车继续向池内推入,此时,推动机构推动原有池中的漂浮板,将漂浮板推走,并留出空位,紧接着将漂浮板放入留出的空位,最后,拉动拉手,使得承载机构旋转(例如旋转90度),目的使得承载机构脱离漂浮板,并从较小的缝隙中(漂浮板与池边的缝隙)离开水池。
58.最后应说明的是:以上所述实施例,仅为本技术的具体实施方式,用以说明本技术的技术方案,而非对其限制,本技术的保护范围并不局限于此,尽管参照前述实施例对本技术进行了详细的说明,本领域的普通技术人员应当理解:任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,其依然可以对前述实施例所记载的技术方案进行修改或可轻易想到变化,或者对其中部分技术特征进行等同替换;而这些修改、变化或者替换,并不使相应技术方案的本质脱离本技术实施例技术方案的精神和范围,都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1