一种植树机
1.本发明属于树木种植设备技术领域,具体的说,涉及一种植树机。
背景技术:
2.随着国家的发展和社会的进步,人们的环保意识逐渐增强,绿色建设的要求逐渐提高,森林绿色植物的覆盖率是绿色建设的一项重要评价指标。但森林绿色植物的覆盖率仅占全球陆地面积的22.08%,还有很大的提升空间,2021年7月23日,《关于科学绿化的实施意见》文件中提出,各地大力创新体制机制,严格落实绿化政策,积极开展科技兴绿,由此能够反映对城市绿化的重视程度。
3.目前国内的全自动化植树机主要是由内蒙古通辽林业机械厂生产的4za-60b型沙丘植树机,其存在着体积大,只能用于沙丘的大苗种植等局限性,且大多数树木种植过程分为松土,送种,压实的流水线作业形式,操作复杂繁琐,少数树木种植过程还缺乏了压实操作,树木成活率低,因此,如何提高树木的种植效率和提高成活率,是我们面临的主要技术问题。
4.为了突破现有的树木种植设备的局限性,填补国内在植树领域的空白,我们设计一款符合绿色生态理念、便于农业和绿化产业使用的带有可替换底盘集成一体化的植树机,将松土、填种、播种、压实等诸多功能模块集成一体,以克服现有技术中种植设备应用范围受限的局限性,同时提高工作效率和树木的成活率。
技术实现要素:
5.本发明提供一种植树机,用于解决现有技术中种植设备应用范围受限的局限性,同时提高树木种植的工作效率和成活率。
6.为实现上述目的,本发明所采用的技术方案如下:
7.一种植树机,包括底盘,所述底盘通过连接盘安装有种植系统,所述种植系统包括同轴且由上而下依次设置的填种模块、播种模块、压实模块和松土模块,且播种模块、压实模块和松土模块由内而外依次设置,填种模块与连接盘相连。
8.进一步的,所述松土模块包括刀头组件、薄壁圆柱、松土升降机构和松土旋转机构,松土旋转机构设置于刀头控制板和圆柱驱动板之间,刀头控制板通过松土升降机构与填种模块相连,且刀头控制板通过松土旋转机构与薄壁圆柱顶端相连,刀头组件的若干个刀头通过自锁组件转动安装于薄壁圆柱底端。
9.进一步的,所述刀头组件包括若干个刀头和连杆,薄壁圆柱的侧壁开设有若干个纵向设置的与连杆适配的通孔,通孔的尺寸与连杆相适配,各个连杆转动安装于对应的通孔内部,连杆底端与刀头固定连接,顶端贯穿通孔并通过自锁组件与薄壁圆柱顶端活动相连。
10.进一步的,所述自锁组件包括拨叉、摆臂和环形结构的圆盘,圆盘上与连杆对应位置处开设有弧形结构的长圆孔,连杆顶端穿过长圆孔并与其间隙配合,摆臂设置于圆盘和
薄壁圆柱顶部之间,摆臂的一端与连杆的顶端固定连接,另一端通过销轴与圆盘外侧构造的连接耳活动连接,拨叉通过摆杆与自锁电机的输出轴相连且拨叉位置与连接耳相对应,自锁电机固设于刀头控制板上。
11.进一步的,所述压实模块包括压实控制板和压实板,压实控制板通过导向筒与压实板相连,且压实控制板通过压实升降机构与播种模块相连,压实板尺寸根据种树坑的截面设计,且压实板的底部为内圈向下突起和外圈向上凹陷的圆形轮廓,导向筒外设有用于增加结构强度的加强筋。
12.进一步的,所述播种模块包括播种控制板和播种舱,播种仓为方管状结构,播种仓的底端为楔形结构,播种仓的底端通过铰接组件转动连接有封闭盖板,播种控制板固设于播种仓顶部外侧,并通过播种升降机构与填种模块相连。
13.进一步的,所述填种模块包括填种控制板、进给机构、填种驱动机构,填种控制板为向上的“凸”台型结构,填种控制板沿其轴心周向均匀开设有若干个填种槽,填种控制板中心位置开设有填种孔,填种槽内设有放置树苗的树苗仓,填种驱动机构设置于填种控制板上,填种控制板通过进给机构与连接盘相连,填种控制板通过压实升降机构与压实模块相连。
14.进一步的,所述填种驱动机构包括填种凸轮,填种凸轮转动安装于填种控制板的顶部,填种凸轮为构造有向内圈凸起的环形结构,填种凸轮外侧为齿形结构,填种驱动机构还包括设于填种控制板顶部的填种电机,填种电机的输出轴通过主动齿轮与填种凸轮外侧的齿形结构相啮合。
15.进一步的,所述树苗仓为圆管状结构,树苗仓底端通过铰接组件安装有封闭底板,树苗仓底部外侧固定连接有滑块,填种槽底部开设有与滑块适配的滑槽,滑块的一端与树苗仓底部外侧壁固定连接,另一端竖直设有推送杆,推送杆通过弹性件与填种控制板相连。
16.进一步的,所述底盘包括机器人底盘、轮胎式底盘和履带式底盘,根据不同种植环境采用不同形式的底盘。
17.本发明由于采用了上述的结构,其与现有技术相比,所取得的技术进步在于:
18.该设备采用互换性底盘设计和集成模块化设计,使该机器可搭载不同的底盘,以适应不同的地形;同时将松土、填种、播种、压实四个模块同轴设置,省去换刀时间,以及各个植树环节之间的复杂的衔接工序,将松土、填种、播种和压实按顺序一次性播种成型,降低了工人的劳动力,克服了现有技术中种植设备应用范围受限的局限性,在很大程度上提高了种植效率和成活率。
附图说明
19.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。
20.在附图中:
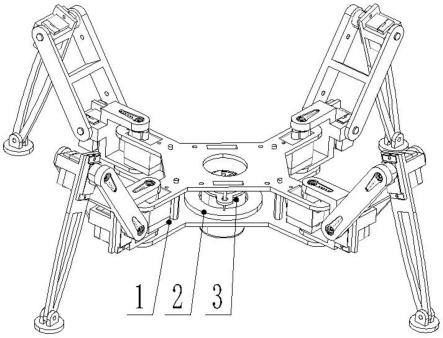
21.图1为本发明实施例采用机器人底盘的结构示意图;
22.图2为本发明实施例采用普通的轮胎式底盘的结构示意图;
23.图3为本发明实施例采用履带式底盘的结构示意图;
24.图4为本发明实施例种植系统的结构示意图;
25.图5为本发明实施例外壳的结构示意图;
26.图6为本发明实施例种植系统四个模块连接的结构示意图;
27.图7为本发明实施例填种模块的结构示意图;
28.图8为图7中a处的局部放大图;
29.图9为本发明实施例中填种控制板的结构示意图;
30.图10为本发明实施例树苗仓的结构示意图;
31.图11为本发明实施例旋转支撑组件的结构示意图;
32.图12为本发明实施例播种模块的结构示意图;
33.图13为本发明实施例压实模块的结构示意图;
34.图14为本发明实施例压实模块的剖视图;
35.图15为本发明实施例松土模块的结构示意图;
36.图16为图15中b处的局部放大图;
37.图17为本发明实施例松土模块的另一角度结构示意图;
38.图18为本发明实施例松土模块传动结构示意图。
39.标注部件:1-底盘,2-连接盘,20-外壳,201-壳体,202-底座,203-固定销钉, 3-种植系统,31-填种模块,310-进给气缸,311-填种控制板,3111-滑槽,3112-填种孔,3113-填种槽,312-填种凸轮,313-主动齿轮,314-填种电机,315-树苗仓,316
‑ꢀ
推送杆,317-滑块,318-封闭底板,3191-限位板,3192-支撑齿轮,3193-支撑杆, 32-播种模块,320-播种气缸,321-播种控制板,322-播种仓,323-合页,324-封闭盖板,33-压实模块,330-压实气缸,331-压实控制板,332-导向筒,333-加强筋, 334-压实板,34-松土模块,340-松土气缸,341-刀头控制板,342-圆柱驱动板,343
‑ꢀ
薄壁圆柱,3430-破土尖刺,344-圆盘,3440-长圆孔,3441-连杆,3442-销轴,3443
‑ꢀ
连接耳,3444-摆杆,3445-自锁电机,3446-滚轮,345-刀头,346-松土电机,347
‑ꢀ
驱动齿轮,348-从动齿圈。
具体实施方式
40.以下结合附图对本发明的优选实施例进行说明。应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
41.本发明公开了一种植树机,如图1所示,包括底盘1,所述底盘1通过连接盘2 安装有种植系统3,所述种植系统3包括同轴且由上而下依次设置的填种模块31、播种模块32、压实模块33和松土模块34,且播种模块32、压实模块33和松土模块34 由内而外依次设置,填种模块31与连接盘2相连。
42.底盘1和连接盘2采用可拆卸设计,在底盘1上设计连接柱,可以和种植系统3 及连接盘2配合固定。如图1所示,所述底盘1包括机器人底盘1、轮胎式底盘1和履带式底盘1,根据不同种植环境采用不同形式的底盘1。
43.该设备采用互换性底盘1设计和集成模块化设计,使该机器可搭载不同的底盘1,以适应不同的地形;同时将松土、填种、播种、压实四个模块同轴设置,省去换刀时间,以及各个植树环节之间的复杂的衔接工序,将松土、填种、播种和压实按顺序一次性播种成型,降低了工人的劳动力,克服了现有技术中种植设备应用范围受限的局限性,在很大程度上提高了种植效率和成活率。
44.作为一个优选的实施例,如图所示,所述松土模块34包括刀头345组件、薄壁圆柱343、松土升降机构和松土旋转机构,松土旋转机构设置于刀头345控制板341 和圆柱驱动板342之间,刀头345控制板341通过松土升降机构与填种模块31相连,且刀头345控制板341通过松土旋转机构与薄壁圆柱343顶端相连,刀头345组件的若干个刀头345通过自锁组件转动安装于薄壁圆柱343底端。
45.具体的,松土模块34外侧设有外壳20,外壳20包括壳体201和底座202,壳体 201为圆筒状结构,底座202为圆盘344状结构,壳体201的顶端与填种模块31的填种控制板311焊接固定,底端固设有底座202,刀头345控制板341通过松土升降机构与底座202相连。
46.所述松土升降机构包括松土气缸340,松土气缸340的固定端与刀头345控制板 341固定连接,松土气缸340的活动端与壳体201底部的底座202固定连接,底座202 底部均匀设有若干个固定销钉203,用于扎进土壤进行定位工作地点。所述松土旋转机构包括驱动齿轮347和从动齿圈348,刀头345控制板341上安装有松土电机346,松土电机346的输出轴与驱动齿轮347同轴固连,从动齿圈348套装于薄壁圆柱343 顶端外侧并与其同轴固连,驱动齿轮347和从动齿圈348相啮合。当然,刀头345控制板341也可以直接通过松土升降机构与连接盘2相连。
47.作为一个优选的实施例,如图所示,所述刀头345组件包括若干个刀头345和连杆3441,薄壁圆柱343的侧壁开设有若干个纵向设置的与连杆3441适配的通孔,通孔的尺寸与连杆3441相适配,各个连杆3441转动安装于对应的通孔内部,连杆3441 底端与刀头345固定连接,顶端贯穿通孔并通过自锁组件与薄壁圆柱343顶端活动相连。
48.作为一个优选的实施例,如图所示,所述自锁组件包括拨叉、摆臂和环形结构的圆盘344,圆盘344上与连杆3441对应位置处开设有弧形结构的长圆孔3440,连杆 3441顶端穿过长圆孔3440并与其间隙配合,摆臂设置于圆盘344和薄壁圆柱343顶部之间,摆臂的一端与连杆3441的顶端固定连接,另一端通过销轴3442与圆盘344 外侧构造的连接耳3443活动连接,拨叉通过摆杆3444与自锁电机3445的输出轴相连且拨叉位置与连接耳3443相对应,自锁电机3445固设于刀头345控制板341上。
49.松土模块34使用具有虹膜结构的刀具组件,即刀头345组件,能在正向旋转时达到工作位置并自锁,而在反转时受土壤的作用力收回壳体201内部,为后续动作留出空间。刀头345数量为三个,刀头345形状为弧形结构,刀头345的一端与连杆 3441底端固定连接,连接耳3443开设有与销轴3442适配条形结构的长圆孔3440,销轴3442与长圆孔3440间隙配合。拨叉外侧转动安装有滚轮3446,摆杆3444的一端与拨叉固定连接,另一端与自锁电机3445的输出轴固定连接。通过控制自锁电机 3445的转动方向,可以使拨叉对连接耳3443向不同方向拨动,从而使连接耳3443 内的销轴3442带动摆臂摆动,连杆3441随摆臂摆动方向旋转,带动底端的刀头345 向不同方向转动。刀头345在连杆3441的带动下,实现顺时针旋转使刀头345伸出,逆时针旋转使刀头345收回,特殊设计的3个刀头345能实现伸出到工作位置时自锁,收回时和薄壁圆柱343重合,可回收的刀头345使后续装置能继续作业,节省了空间。薄壁圆柱343下端还设有若干个破土尖刺3430,若干个破土尖刺3430沿薄壁圆柱343 底端均匀分布,并与刀头345组件的刀头345间隔设置。薄壁圆柱343下方有3个破土尖刺3430,能轻易插入土壤内从而实现定位,除此之外,薄壁圆柱343还能限制松动的土壤只在其范围内运动,不让土壤流失导致压实成效的降低。整个松土模块 34在圆柱驱动板342和
刀头345控制板341的作用下边旋转边向下移动,刀头345 将土壤松化并将其聚集在圆柱内,实现松土的效果。拨叉在松土过程中旋转至远离连接耳3443位置处,避免与其干涉,拨叉上设置滚轮3446,可避免拨叉与连接耳3443 刚性接触,降低摩擦阻力,延长使用寿命。
50.作为一个优选的实施例,如图所示,所述压实模块33包括压实控制板331和压实板334,压实控制板331通过导向筒332与压实板334相连,且压实控制板331通过压实升降机构与播种模块32相连,压实板334尺寸根据种树坑的截面设计,且压实板334的底部为内圈向下突起和外圈向上凹陷的圆形轮廓,导向筒332外设有用于增加结构强度的加强筋333。
51.压实升降机构包括压实气缸330,压实气缸330的固定端与播种控制板321固定连接,压实气缸330的活动端与压实控制板331固定连接,压实板334底部的轮廓设计,可以在土层压实后的树苗周围形成土坑结构,以便于树苗储存水分和养料,同时导向筒332外设4根加强筋333用于加强压实模块33的结构刚度,防止曲面压实板 334受力弯曲变形,在压实控制板331和压实升降机构的带动下,压实板334向下压土使土壤成型。
52.作为一个优选的实施例,如图所示,所述播种模块32包括播种控制板321和播种舱,播种仓322为方管状结构,播种仓322的底端为楔形结构,播种仓322的底端通过铰接组件转动连接有封闭盖板324,播种控制板321固设于播种仓322顶部外侧,并通过播种升降机构与填种模块31相连。
53.所述播种升降机构包括播种气缸320,播种气缸320的固定端与填种控制板311 固定连接,播种气缸320的活动端与播种控制板321固定连接。封闭盖板324采用的铰接组件为合页323,播种仓322为薄壁铝方,其内装有树苗仓315供给的树苗。播种仓322底端的封闭盖板324插入土壤时闭合,拔出时松开,从而让树苗落入土壤中。播种过程为:播种仓322在播种气缸320的推动下,随着播种控制板321向下移动,插入土壤内部,此过程中封闭盖板324及合页323在土壤的阻力作用下处于关闭状态,树苗在封闭盖板324的阻挡下停留在播种仓322内部。当到达松土的深度时,通过压实模块33进行压实,播种气缸320做回缩运动,播种控制板321上移,封闭盖板324 在树苗的重力作用和土壤的粘滞作用下打开,从而使树苗从播种仓322内部脱离而掉入土壤中,从而实现播种的过程。
54.作为一个优选的实施例,如图所示,所述填种模块31包括填种控制板311、进给机构、填种驱动机构,填种控制板311为向上的“凸”台型结构,填种控制板311 沿其轴心周向均匀开设有若干个填种槽3113,填种控制板311中心位置开设有填种孔3112,填种槽3113内设有放置树苗的树苗仓315,填种驱动机构设置于填种控制板311上,填种控制板311通过进给机构与连接盘2相连,填种控制板311通过压实升降机构与压实模块33相连。
55.所述进给机构包括三个进给气缸310,三个进给气缸310呈三角形布置,进给气缸310的固定端与填种控制板311固定连接,活动端与连接盘2固定连接。进给机构的进给气缸310,用于对种植系统3的整体进行升降,并配合其他气缸根据需要做出相应动作。
56.作为一个优选的实施例,如图所示,所述填种驱动机构包括填种凸轮312,填种凸轮312转动安装于填种控制板311的顶部,填种凸轮312为构造有向内圈凸起的环形结构,通过旋转支撑组件转动安装于填种控制板311顶部,填种凸轮312外侧为齿形结构,填种驱动机构还包括设于填种控制板311顶部的填种电机314,填种电机314 的输出轴通过主动齿轮313与填种凸轮312外侧的齿形结构相啮合。
57.作为一个优选的实施例,如图所示,所述树苗仓315为圆管状结构,树苗仓315 底
端通过铰接组件安装有封闭底板318,树苗仓315底部外侧固定连接有滑块317,填种槽3113底部开设有与滑块317适配的滑槽3111,滑块317的一端与树苗仓315 底部外侧壁固定连接,另一端竖直设有推送杆316,推送杆316通过弹性件与填种控制板311相连。弹性组件可以选择弹簧或者弹力带。具体的,封闭底板318通过一个转轴转动安装在树苗仓315的底部。如图11所示,填种凸轮312通过旋转支撑组件旋转安装于填种控制板311顶部,旋转支撑组件包括支撑齿轮3192和支撑杆3193,支撑齿轮3192通过支撑杆3193转动安装于填种凸轮312顶部,支撑齿轮3192与填种凸轮312相啮合,且支撑齿轮3192上下两端均构造有限位板3191,以用于对填种凸轮312轴向位置的限定。
58.树苗仓315位于填种槽3113内部,通过滑块317和滑槽3111的限位不会倾倒,处于竖直状态,其底部的封闭底板318处于闭合状态,树苗放在树苗舱里并被封闭底板318挡住,不会向下移动掉落,填种之前,填种气缸动作,将填种,在凸轮转动下,树苗仓315在凸轮内侧凸起部位和弹性件的共同作用下,依次经历推程和回程,从而实现树苗仓315从圆周处移动至圆心处再返回至圆周处。在树苗仓315处于圆心处时,由于圆心底部设有填种孔3112,为镂空,树苗仓315下方的封闭底板318在重力作用下打开,从而将树苗下放至播种仓322内,为播种做好准备,在回程时,受填种槽 3113底部阻挡作用,盖子重新闭合,做好放置下一颗树苗的准备。采用填种凸轮312 和弹性件,每个推程和回程将一颗树苗从填种槽3113推入播种仓322,实现连续播种。
59.本植树装置的传动部分选用电机和气缸作为动力源,电机驱动齿轮347的旋转,气缸推动种树系统的四个模块之间的相对运动。由于整个植树机的机械装置中存在电机、齿轮传动和气缸传动,所以将整个机械装置包裹在圆柱型的薄壁外壳20下能保护机械装置不受外界环境的干扰,从而降低故障率。为了定位工作点,使用底座202 和地面直接接触,并通过进给机构施加一定的力,利用土壤和底座202的摩擦力保持定位的精度。当植树机行驶到工作点时,壳体201和底座202通过进给机构整体下移接触地面,从而完成定位。底座202和填种控制板311之间通过导杆相连,导杆贯穿刀头345控制板341和圆柱驱动板342、播种控制板321、压实控制板331,以起到导向作用,保证各模块之间同轴,其中播种控制板321和压实控制板331为三爪结构,导杆穿过三抓结构进行导向。
60.本发明的工作过程如下:
61.按照各个模块作用的顺序,规定外壳20为第一级装置,松土模块34为第二级装置,填种模块31为第三级装置,播种模块32为第四级装置,压实模块33为第五级装置。
62.首先,第一级装置动作。底盘1搭载种植系统3到达工作地点指定位置之后,以连接盘2为基准,通过三个进给气缸310伸缩动作来实现与填种控制板311固定连接的壳体201和底座202的下放,底座202先与地面接触,其上固定销钉203会扎进土壤,稳固种植过程,定位工作地点。
63.其次,第二级装置动作。松土气缸340伸缩动作,刀头345控制板341微动使刀头345露出外壳20,而后松土电机346通过驱动齿轮347和从动齿圈348带动薄壁圆柱343旋转,第二级装置核心部件开始旋转动作,与此同时,自锁组件动作,自锁电机3445通过输出轴和拨叉拨动连接耳3443,促使刀头345顺时针转动,在完全伸出的同时并展开达到工作位置并自锁,进而随着薄壁圆柱343一起旋转开始松土作业。此处的旋转动作在本设计中使用齿轮啮合传动。松土时,第二级装置和其他所有装置产生相对运动,故选取固定好的底座202为基
准,使用松土气缸340控制第二级装置在一边旋转同时一边向下进给运动,在松土工作完成后齿轮将反向运转,拨叉反向拨动连接耳3443,使刀头345逆时针旋转缩入壳体201内部,为后续动作提供操作空间。
64.然后,第三级和第四级装置接连动作,实现把树苗插入土壤的功能。在这个阶段,首先填种电机314旋转,通过主动齿轮313带动填种凸轮312旋转,树苗仓315被向中间推动,直到中心空位置,其底部封闭底板318打开,使一个树苗舱内的树苗进入播种模块32的播种仓322内部,此时,播种仓322底端的合页323和封闭盖板324 闭合,树苗定位在播种仓322内部,随着填种凸轮312继续旋转,树苗仓315在弹性件的拉力作用下复位,填种凸轮312停止旋转,为下一次推动旁边的填种仓填种做好准备。
65.通过连接盘2和填种控制板311作为基准,使用压实气缸330调节第四级和第五级保持相对静止,即通过播种气缸320运动,使播种控制板321和压实控制板331共同向下运动,使播种仓322向下运动,进行播种。第四级和第五级相对位置不变,可以增大第五级装置的压实运动空间,压实效果更好。
66.最后,第五级装置动作。主要是通过压实气缸330动作,使第五级和第四级之间的相对运动起到压实效果,故在第四五级之间加气压传动杆,即压实气缸330。由于第四级装置已在填种模块31为定位基准的情况下固定,播种控制板321通过播种气缸320与填种控制板311之间相对固定,所以该气压传动杆可以使第四级装置和第五级装置之间产生相对位移,即通过压实气缸330推动压实控制板331相对于播种控制板321向下移动压实,起到压实效果。
67.本发明提供的植树机具备以下优点:
68.其一,可替换性的底盘1使种植系统3的适用范围更广。此外,底盘1和种植系统3的模块化设计,使两者具有更强的可分化型,底盘1和种植系统3可向不同方向发展,从而组合出更多新型的,多功能的种植设备;
69.其二,种植系统3各部分的设计采用了同轴式集成化设计,将所有动作部件集成在同一轴线上,省去了切换道具或定位工作位置等时间,提高了工作效率。此外,多数为圆形的设计使加工精度在经济范围内比其他形状的装置高;
70.其三,松土部分刀头345的设计,巧妙地运用了虹膜式结构,利用正向自锁,反向收回的特性解决了松土刀具和后续工作模块占用同一工作地点从而出现干涉的难题;
71.其四,传动部分运用了相对位置控制法,即每次只改变两个物体的相对位置来实现每个种树步骤的顺序执行。气压传动和齿轮传动既能保证传动稳定性要求和功率要求,也具有更好的装配性能,维修性能和经济效益;
72.目前,国内多单功能种树机器。如典型的挖坑种树机,无论是拖拉机带植树挖坑的还是双人操作打坑机等,仍然需要大量人力配合,自动化程度不够高,种树效率低。而本底盘1可替换的松土播种压实集成化植树机,不仅可以适应多种地形,实现集松土,送树,种树,压土一体化种树功能。
73.最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明权
利要求保护的范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1