一种精确化作业小型棉花采摘机器人
1.本发明涉及了一种采摘机器人,具体涉及一种基于人工智能和机械控制的精确化作业小型棉花采摘机器人。
背景技术:
2.棉花是纺织业的必需品。目前棉花的种植范围广,产量大。人工采摘的方法劳动强度大,工作效率低,因此现代采棉业的发展方向是棉花采摘的机械化、自动化和智能化。现有棉花采摘大多使用大型机械,然而大型机械只适用于大面积平坦棉田的采摘,在山地和较小地块难以使用,且大型机械采摘棉花时不区分叶和茎秆,容易使采摘的棉花中有较多杂物。因此,本技术提出了一种小型的精确化作业棉花采摘机器人。
技术实现要素:
3.为了解决背景技术中存在的问题,本发明所提供一种精确化作业小型棉花采摘机器人,为棉花采摘业提供一种智能化,精准采摘的小型棉花采摘机器人,结合深度学习目标识别和双目测距的准确性,四轴机械臂运动的灵活性,以及自主设计的末端执行器的高效性,实现对棉花的检测和定位,精确高效地采摘棉花。
4.本发明采用的技术方案是:
5.本发明棉花采摘机器人包括底盘、储棉盒、两个激光定位装置、万向轮行走机构、机械臂采摘机构、双目摄像头、单片机电路板、边缘计算设备和电源,万向轮行走机构安装在底盘底面,储棉盒、两个激光定位装置、机械臂采摘机构、双目摄像头、单片机电路板、边缘计算设备和电源安装在底盘顶面;机械臂采摘机构的根端安装在底盘顶面中部,两个激光定位装置分别安装在底盘顶面的相对两侧边,储棉盒安装在两个激光定位装置之间的底盘顶面的一侧边,双目摄像头朝向棉花采摘机器人的前进方向的侧面;单片机电路板电连接电源、两个激光定位装置、万向轮行走机构、机械臂采摘机构、双目摄像头和边缘计算设备。底盘的正上方还水平布置有盖板,单片机电路板和电源安装在盖板和底盘之间;双目摄像头通过连接件安装在底盘顶面,双目摄像头的其中一个摄像头位于另一个摄像头的正上方。
6.所述的机械臂采摘机构包括四轴机械臂和滚筒式末端执行器,四轴机械臂的根端安装在底盘顶面中部,四轴机械臂的末端连接滚筒式末端执行器;四轴机械臂和滚筒式末端执行器电连接单片机电路板。
7.所述的四轴机械臂包括第一关节舵机、第二关节舵机、第三关节舵机、第四关节舵机、旋转底座、大臂和小臂,旋转底座水平安装在底盘顶面中部,旋转底座的顶面中部活动布置有旋转盘,第一关节舵机的机身安装在旋转底座的底部,第一关节舵机的旋转轴竖直朝上同步连接旋转底座的旋转盘的底面中心,旋转底座绕中心点旋转;旋转盘的顶面中部安装有第二关节舵机,大臂为h型连接臂,大臂的一侧的两端分别活动连接在第二关节舵机的相对两侧,第二关节舵机的相对两侧的其中一侧的输出轴水平同步连接大臂的一侧的其
中一端,第二关节舵机的相对两侧的另外一侧的机身活动连接大臂的一侧的另外一端,大臂的一侧绕第二关节舵机的输出轴在竖直面上旋转;大臂的另一侧的两端分别活动连接在第三关节舵机的相对两侧,第三关节舵机的相对两侧的其中一侧的输出轴水平同步连接大臂的另一侧的其中一端,第三关节舵机的相对两侧的另外一侧的机身活动连接大臂的另一侧的另外一端,第三关节舵机绕自身的输出轴在竖直面上旋转;第三关节舵机的机身固定连接小臂的一侧,小臂的另一侧分为两端,小臂的另一侧的两端分别活动连接在第四关节舵机的相对两侧,第四关节舵机的相对两侧的其中一侧的输出轴水平同步连接小臂的另一侧的其中一端,第四关节舵机的相对两侧的另外一侧的机身活动连接小臂的另一侧的另外一端,第四关节舵机绕自身的输出轴在竖直面上旋转;滚筒式末端执行器安装在远离小臂的第四关节舵机的一侧机身上;第一关节舵机、第二关节舵机、第三关节舵机和第四关节舵机电连接单片机电路板。
8.所述的第二关节舵机、第三关节舵机和第四关节舵机的输出轴相互平行。
9.所述的滚筒式末端执行器包括执行器支架、带刺滚筒、滤架、第二直流电机和两个齿轮;第二直流电机电连接单片机电路板;执行器支架安装在远离小臂的第四关节舵机的一侧机身上,带刺滚筒、滤架和第二直流电机的机身安装在执行器支架上;滤架安装在带刺滚筒和第四关节舵机之间并不相接触,带刺滚筒水平布置,带刺滚筒的中心旋转轴的两端活动连接执行器支架,带刺滚筒的中心旋转轴的其中一端同步连接一个齿轮的中心,一个齿轮和另一个齿轮相互啮合,两个齿轮的齿轮面位于同一平面内;两个齿轮位于第二直流电机和带刺滚筒之间,第二直流电机的输出轴垂直同步连接另一个齿轮的中心。
10.所述的滤架包括若干滤板,各个滤板均匀间隔竖直布置;每个滤板的侧面所在的平面垂直于带刺滚筒的中心旋转轴,每个滤板的上部为弯曲的条板状,滤板的上部朝远离带刺滚筒的方向弯曲,滤板的下部为三角板状,三角板状朝靠近带刺滚筒的方向凸出,三角板状的中心贯通,带刺滚筒和滤架之间形成临时储棉凹槽。
11.所述的带刺滚筒的侧面沿轴向均匀间隔设有若干列刺爪,每列刺爪中均匀间隔设有若干条刺爪,每条刺爪均朝带刺滚筒的中心轴弯曲,每条刺爪的端部的弯曲方向均相同;每列刺爪中的相邻两个刺爪之间的间隔距离大于滤架的滤板的厚度;每个刺爪的宽度小于滤架的相邻两个滤板的间隔距离;带刺滚筒在绕自身旋转轴旋转时,带刺滚筒的每列刺爪中的各个刺爪间隔交错穿过滤架中的各个滤板下部之间的间隔处。
12.在带刺滚筒不旋转时,滤架位于带刺滚筒的侧方,位于带刺滚筒上部的一列刺爪中的各个刺爪的朝向滤架弯曲,位于带刺滚筒下部的一列刺爪中的各个刺爪的末端反向滤架弯曲。
13.棉花采摘机器人在采摘棉花时,带刺滚筒位于棉花的正下方,带刺滚筒上部的各个刺爪勾住棉花,单片机电路板控制第二直流电机旋转进而带动两个齿轮转动,从而带动带刺滚筒在正向旋转,带刺滚筒将勾住的棉花旋转勾入滤架的各个间隔中进行临时存储。
14.所述的每个激光定位装置包括激光定位侧板和若干激光传感器,激光定位侧板竖直布置在底盘的顶面,各个激光传感器均匀间隔布置在激光定位侧板上各个激光传感器垂直朝向激光定位侧板的外侧;两个激光定位装置的激光定位侧板相互平行;各个激光传感器均电连接单片机电路板。
15.所述的储棉盒为上侧开口的盒体,储棉盒的底面与底盘的顶面不相接触,底盘的
顶面还安装有第一直流电机,第一直流电机靠近储棉盒的一侧面,第一直流电机的输出轴同步连接储棉盒的一侧面。
16.所述的万向轮行走机构包括四个万向轮装置,四个万向轮装置分别安装在底盘底面的四个顶角处;每个万向轮装置包括步进电机和万向轮,步进电机的机身安装在底盘的底面,步进电机的输出轴连接各自的一个万向轮的中心轴;每个步进电机均电连接单片机电路板。
17.所述的棉花采摘机器人在采摘棉花时,首先通过双目摄像头实时拍摄周围环境并传输至单片机电路板进而传输至边缘计算设备中,单片机电路板控制万向轮行走机构的四个万向轮装置的步进电机带动万向轮转动,带动棉花采摘机器人行驶,行驶过程中通过两个激光定位装置的各个激光传感器测定棉花采摘机器人与两侧的障碍物之间的距离,通过单片机电路板控制万向轮行走机构行驶时每个激光传感器与自身最靠近的一个障碍物之间的距离大于预设距离。
18.当双目摄像头拍摄到待采摘棉花并传输至边缘计算设备时,单片机电路板控制万向轮行走机构停止行驶,边缘计算设备根据双目测距原理测量双目摄像头拍摄到待采摘棉花的中心点的三维坐标,从而获得棉花采摘机器人与待采摘棉花之间的距离并传输至单片机电路板;单片机电路板控制万向轮行走机构继续行驶,带动棉花采摘机器人行驶至待采摘棉花附近;单片机电路板控制第一关节舵机、第二关节舵机、第三关节舵机和第四关节舵机的输出轴旋转,第一关节舵机带动旋转底座的旋转盘旋转,带动第二关节舵机旋转,第二关节舵机带动大臂旋转,第三关节舵机带动小臂旋转,第四关节舵机带动滚筒式末端执行器,使得滚筒式末端执行器的带刺滚筒和滤架位于待采摘棉花的正下方,滤架的各个滤板的上部位于待采摘棉花的正下方,带刺滚筒顶部的各个刺爪勾住待采摘棉花;单片机电路板控制第二直流电机的输出轴旋转进而带动两个齿轮转动,从而带动带刺滚筒正向旋转,带刺滚筒将勾住的待采摘棉花旋转勾入带刺滚筒和滤架之间的临时储棉凹槽中进行临时存储。
19.当棉花采摘机器人采摘到棉花后,单片机电路板控制第一关节舵机、第二关节舵机、第三关节舵机和第四关节舵机的输出轴旋转,进而带动滚筒式末端执行器移动至储棉盒的正上方,单片机电路板控制第二直流电机的输出轴旋转,进而带动带刺滚筒反向旋转,带刺滚筒上的各个刺爪将临时储棉凹槽中的棉花推出至储棉盒中,完成棉花的单次采摘,重复以上过程以实现棉花的多次采摘和存储。
20.当棉花采摘工作结束时,单片机电路板控制万向轮行走机构带动棉花采摘机器人行驶至棉花的最终存储处,单片机电路板再控制第一直流电机的输出轴旋转,带动储棉盒旋转,从而使得棉花从储棉盒的开口处掉出至棉花的最终存储处完成棉花的倾倒收集。
21.在棉花采摘机器人在采摘棉花前,首先拍摄若干张棉花图片,将各张棉花图片输入yolov5神经网络模型进行训练,直至yolov5神经网络模型收敛,获得训练完成的yolov5神经网络模型,将训练完成的yolov5神经网络模型存储在单片机电路板中,具体可采用英伟达jetson nano,将双目摄像头拍摄到的图片实时传输至单片机电路板的训练完成的yolov5神经网络模型中,训练完成的yolov5神经网络模型输出图片中棉花的识别结果,当识别到棉花时,单片机电路板根据识别结果进行测距。
22.本发明的有益效果是:
23.本发明小型棉花采摘机器人由步进电机达到行走目标,控制简单灵活,配合万向轮能轻易实现机器人直行、转向和旋转;该小型棉花采摘机器人通过四轴机械臂和滚筒式末端执行机构,灵活高效地采集棉花;该小型棉花采摘机器人可以通过双目摄像头检测棉花并进行测距,然后单片机电路板控制四轴机械臂运动至棉花处,通过该小型棉花采摘机器人的滚筒式末端执行器滚筒上的刺有效拉扯棉花并将其卡在滤架上实现棉花的精确采摘。
附图说明
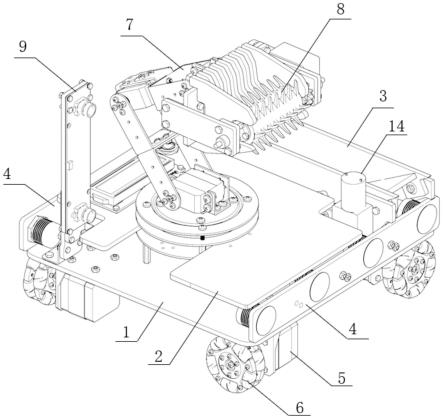
24.图1是本发明中小型棉花采摘机器人的立体结构示意图;
25.图2是本发明中四轴机械臂的立体结构示意图;
26.图3是本发明中滚筒式末端执行器的结构示意图;
27.图4是本发明中滤板的结构示意图;
28.图中:1、底盘,2、盖板,3、储棉盒,4、激光定位装置,5、步进电机,6、万向轮,7、四轴机械臂,8、滚筒式末端执行器,9、双目摄像头,10、连接件,14、第一直流电机,15、第一关节,16、第二关节,17、第三关节,18、第四关节,19、旋转底座,20、大臂,21、小臂,22、带刺滚筒,23、滤板,24、第二直流电机。
具体实施方式
29.下面结合附图及具体实施例对本发明作进一步详细说明。
30.如图1所示,本发明棉花采摘机器人包括底盘1、储棉盒3、两个激光定位装置4、万向轮行走机构、机械臂采摘机构、双目摄像头9、单片机电路板、边缘计算设备和电源,万向轮行走机构安装在底盘1底面,储棉盒3、两个激光定位装置4、机械臂采摘机构、双目摄像头9、单片机电路板、边缘计算设备和电源安装在底盘1顶面;机械臂采摘机构的根端安装在底盘1顶面中部,两个激光定位装置4分别安装在底盘1顶面的相对两侧边,储棉盒3安装在两个激光定位装置4之间的底盘1顶面的一侧边,双目摄像头9朝向棉花采摘机器人的前进方向的侧面;单片机电路板电连接电源、两个激光定位装置4、万向轮行走机构、机械臂采摘机构、双目摄像头9和边缘计算设备。底盘1的正上方还水平布置有盖板1,单片机电路板和电源安装在盖板1和底盘1之间;双目摄像头9通过连接件10安装在底盘1顶面,双目摄像头9的其中一个摄像头位于另一个摄像头的正上方。
31.每个激光定位装置4包括激光定位侧板和若干激光传感器,激光定位侧板竖直布置在底盘1的顶面,各个激光传感器均匀间隔布置在激光定位侧板上各个激光传感器垂直朝向激光定位侧板的外侧;两个激光定位装置4的激光定位侧板相互平行;各个激光传感器均电连接单片机电路板。
32.储棉盒3为上侧开口的盒体,储棉盒3的底面与底盘1的顶面不相接触,底盘1的顶面还安装有第一直流电机14,第一直流电机14靠近储棉盒3的一侧面,第一直流电机14的输出轴同步连接储棉盒3的一侧面。
33.万向轮行走机构包括四个万向轮装置,四个万向轮装置分别安装在底盘1底面的四个顶角处;每个万向轮装置包括步进电机5和万向轮6,步进电机5的机身安装在底盘1的底面,步进电机5的输出轴连接各自的一个万向轮6的中心轴;每个步进电机5均电连接单片
机电路板。
34.机械臂采摘机构包括四轴机械臂7和滚筒式末端执行器8,四轴机械臂7的根端安装在底盘1顶面中部,四轴机械臂7的末端连接滚筒式末端执行器8;四轴机械臂7和滚筒式末端执行器8电连接单片机电路板。
35.如图2所示,四轴机械臂7包括第一关节舵机15、第二关节舵机16、第三关节舵机17、第四关节舵机18、旋转底座19、大臂20和小臂21,旋转底座19水平安装在底盘1顶面中部,旋转底座19的顶面中部活动布置有旋转盘,第一关节舵机15的机身安装在旋转底座19的底部,第一关节舵机15的旋转轴竖直朝上同步连接旋转底座19的旋转盘的底面中心,旋转底座19绕中心点旋转;旋转盘的顶面中部安装有第二关节舵机16,大臂20为h型连接臂,大臂20的一侧的两端分别活动连接在第二关节舵机16的相对两侧,第二关节舵机16的相对两侧的其中一侧的输出轴水平同步连接大臂20的一侧的其中一端,第二关节舵机16的相对两侧的另外一侧的机身活动连接大臂20的一侧的另外一端,大臂20的一侧绕第二关节舵机16的输出轴在竖直面上旋转;大臂20的另一侧的两端分别活动连接在第三关节舵机17的相对两侧,第三关节舵机17的相对两侧的其中一侧的输出轴水平同步连接大臂20的另一侧的其中一端,第三关节舵机17的相对两侧的另外一侧的机身活动连接大臂20的另一侧的另外一端,第三关节舵机17绕自身的输出轴在竖直面上旋转;第三关节舵机17的机身固定连接小臂21的一侧,小臂21的另一侧分为两端,小臂21的另一侧的两端分别活动连接在第四关节舵机18的相对两侧,第四关节舵机18的相对两侧的其中一侧的输出轴水平同步连接小臂21的另一侧的其中一端,第四关节舵机18的相对两侧的另外一侧的机身活动连接小臂21的另一侧的另外一端,第四关节舵机18绕自身的输出轴在竖直面上旋转;滚筒式末端执行器8安装在远离小臂21的第四关节舵机18的一侧机身上;第一关节舵机15、第二关节舵机16、第三关节舵机17和第四关节舵机18电连接单片机电路板。第二关节舵机16、第三关节舵机17和第四关节舵机18的输出轴相互平行。
36.如图3所示,滚筒式末端执行器8包括执行器支架、带刺滚筒22、滤架、第二直流电机24和两个齿轮;第二直流电机24电连接单片机电路板;执行器支架安装在远离小臂21的第四关节舵机18的一侧机身上,带刺滚筒22、滤架和第二直流电机24的机身安装在执行器支架上;滤架安装在带刺滚筒22和第四关节舵机18之间并不相接触,带刺滚筒22水平布置,带刺滚筒22的中心旋转轴的两端活动连接执行器支架,带刺滚筒22的中心旋转轴的其中一端同步连接一个齿轮的中心,一个齿轮和另一个齿轮相互啮合,两个齿轮的齿轮面位于同一平面内;两个齿轮位于第二直流电机24和带刺滚筒22之间,第二直流电机24的输出轴垂直同步连接另一个齿轮的中心。
37.滤架包括若干滤板23,各个滤板均匀间隔竖直布置;每个滤板23的侧面所在的平面垂直于带刺滚筒22的中心旋转轴,每个滤板23的上部为弯曲的条板状,滤板23的上部朝远离带刺滚筒22的方向弯曲,滤板23的下部为三角板状,三角板状朝靠近带刺滚筒22的方向凸出,如图4所示,三角板状的中心贯通,带刺滚筒22和滤架之间形成临时储棉凹槽。
38.带刺滚筒22的侧面沿轴向均匀间隔设有若干列刺爪,每列刺爪中均匀间隔设有若干条刺爪,每条刺爪均朝带刺滚筒22的中心轴弯曲,每条刺爪的端部的弯曲方向均相同;每列刺爪中的相邻两个刺爪之间的间隔距离大于滤架的滤板23的厚度;每个刺爪的宽度小于滤架的相邻两个滤板23的间隔距离;带刺滚筒22在绕自身旋转轴旋转时,带刺滚筒22的每
列刺爪中的各个刺爪间隔交错穿过滤架中的各个滤板23下部之间的间隔处。
39.在带刺滚筒22不旋转时,滤架位于带刺滚筒22的侧方,位于带刺滚筒22上部的一列刺爪中的各个刺爪的朝向滤架弯曲,位于带刺滚筒22下部的一列刺爪中的各个刺爪的末端反向滤架弯曲;棉花采摘机器人在采摘棉花时,带刺滚筒22位于棉花的正下方,带刺滚筒22上部的各个刺爪勾住棉花,单片机电路板控制第二直流电机24旋转进而带动两个齿轮转动,从而带动带刺滚筒22在正向旋转,带刺滚筒22将勾住的棉花旋转勾入滤架的各个间隔中进行临时存储。
40.本发明采摘机器人的棉花采摘的具体实施方式如下:
41.所述的棉花采摘机器人在采摘棉花时,首先通过双目摄像头9实时拍摄周围环境并传输至单片机电路板进而传输至边缘计算设备中,单片机电路板控制万向轮行走机构的四个万向轮装置的步进电机5带动万向轮6转动,带动棉花采摘机器人行驶,行驶过程中通过两个激光定位装置4的各个激光传感器测定棉花采摘机器人与两侧的障碍物之间的距离,通过单片机电路板控制万向轮行走机构行驶时每个激光传感器与自身最靠近的一个障碍物之间的距离大于预设距离。
42.当双目摄像头9拍摄到待采摘棉花并传输至边缘计算设备时,单片机电路板控制万向轮行走机构停止行驶,边缘计算设备根据双目测距原理测量双目摄像头9拍摄到待采摘棉花的中心点的三维坐标,从而获得棉花采摘机器人与待采摘棉花之间的距离并传输至单片机电路板;单片机电路板控制万向轮行走机构继续行驶,带动棉花采摘机器人行驶至待采摘棉花附近;单片机电路板控制第一关节舵机15、第二关节舵机16、第三关节舵机17和第四关节舵机18的输出轴旋转,第一关节舵机15带动旋转底座19的旋转盘旋转,带动第二关节舵机16旋转,第二关节舵机16带动大臂20旋转,第三关节舵机17带动小臂21旋转,第四关节舵机18带动滚筒式末端执行器8,使得滚筒式末端执行器8的带刺滚筒22和滤架位于待采摘棉花的正下方,滤架的各个滤板的上部位于待采摘棉花的正下方,带刺滚筒22顶部的各个刺爪勾住待采摘棉花;单片机电路板控制第二直流电机24的输出轴旋转进而带动两个齿轮转动,从而带动带刺滚筒22正向旋转,带刺滚筒22将勾住的待采摘棉花旋转勾入带刺滚筒22和滤架之间的临时储棉凹槽中进行临时存储。
43.当棉花采摘机器人采摘到棉花后,单片机电路板控制第一关节舵机15、第二关节舵机16、第三关节舵机17和第四关节舵机18的输出轴旋转,进而带动滚筒式末端执行器8移动至储棉盒3的正上方,单片机电路板控制第二直流电机24的输出轴旋转,进而带动带刺滚筒22反向旋转,带刺滚筒22上的各个刺爪将临时储棉凹槽中的棉花推出至储棉盒3中,完成棉花的单次采摘,重复以上过程以实现棉花的多次采摘和存储。
44.当棉花采摘工作结束时,单片机电路板控制万向轮行走机构带动棉花采摘机器人行驶至棉花的最终存储处,单片机电路板再控制第一直流电机14的输出轴旋转,带动储棉盒3旋转,从而使得棉花从储棉盒3的开口处掉出至棉花的最终存储处完成棉花的倾倒收集。
45.在棉花采摘机器人在采摘棉花前,首先拍摄若干张棉花图片,将各张棉花图片输入yolov5神经网络模型进行训练,直至yolov5神经网络模型收敛,获得训练完成的yolov5神经网络模型,将训练完成的yolov5神经网络模型存储在单片机电路板中,具体可采用英伟达jetson nano,将双目摄像头9拍摄到的图片实时传输至单片机电路板的训练完成的
yolov5神经网络模型中,训练完成的yolov5神经网络模型输出图片中棉花的识别结果,当识别到棉花时,单片机电路板根据识别结果进行测距。
46.本发明小型棉花采摘机器人由步进电机达到行走目标,控制简单灵活,配合万向轮能轻易实现机器人直行、转向和旋转;该小型棉花采摘机器人通过四轴机械臂和滚筒式末端执行机构,灵活高效地采集棉花;该小型棉花采摘机器人可以通过双目摄像头检测棉花并进行测距,然后单片机电路板控制四轴机械臂运动;该小型棉花采摘机器人滚筒式末端执行器滚筒上的刺经过多次实验调整至合适大小、形状和数量,能有效拉扯棉花并将其卡在滤网上;该小型棉花采摘机器人滚筒式末端执行器的滤架具有一侧凹陷,一侧平坦的特点,能在采摘棉花时用凹陷侧卡住棉花,并在将棉花放入储棉盒中时用平坦侧与滚筒反转配合,推出棉花,实现棉花的有效采摘。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1